Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
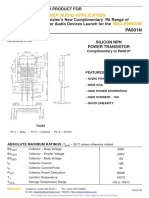
- Power Audio Application Millennium: New Product ForDocumento3 paginePower Audio Application Millennium: New Product Forjose antonio iglesias infantesNessuna valutazione finora
- EL817Documento14 pagineEL817Jose BerrospiNessuna valutazione finora
- Capacitor Motor - Generator FinalDocumento10 pagineCapacitor Motor - Generator FinalPiyush SinghNessuna valutazione finora
- Electrical Reviewer ProblemsDocumento9 pagineElectrical Reviewer ProblemsHary Kriz100% (1)
- AURETR129 Diagnose and Repair Charging Systems V1Documento237 pagineAURETR129 Diagnose and Repair Charging Systems V1jaredmuge808Nessuna valutazione finora
- TP 5750Documento80 pagineTP 5750Roberto Sanchez ZapataNessuna valutazione finora
- Pick and PlaceDocumento16 paginePick and PlaceThanga rajNessuna valutazione finora
- Electromag Netism: C. MuisDocumento85 pagineElectromag Netism: C. MuisMat MinNessuna valutazione finora
- Manual Yamaha YST-SW800 (Service)Documento26 pagineManual Yamaha YST-SW800 (Service)Alex NikitinNessuna valutazione finora
- C ControlsDocumento76 pagineC ControlsLuan HuynhNessuna valutazione finora
- Domini FPDocumento1 paginaDomini FPglenn villacruzNessuna valutazione finora
- Direct Tunneling Current Model For Circuit SimulationDocumento4 pagineDirect Tunneling Current Model For Circuit Simulationapi-19668941Nessuna valutazione finora
- Gas-Insulated Switchgear: Type ZX1.2Documento14 pagineGas-Insulated Switchgear: Type ZX1.2xinying liuNessuna valutazione finora
- Repuestos Horno Teka ht490Documento10 pagineRepuestos Horno Teka ht490IcursoCLNessuna valutazione finora
- Exp3 - H3-Characteristics of PN Diode and Zener DiodeDocumento7 pagineExp3 - H3-Characteristics of PN Diode and Zener Diodeshubhika guptaNessuna valutazione finora
- US5430635 патент Bertonee.Documento12 pagineUS5430635 патент Bertonee.Vasily VorobyovNessuna valutazione finora
- VNP28N04 E DatasheetzDocumento11 pagineVNP28N04 E Datasheetzwawans6762Nessuna valutazione finora
- Method StatementDocumento5 pagineMethod Statementnayum100% (1)
- Datasheet 27Documento2 pagineDatasheet 27segundo zapataNessuna valutazione finora
- Generator Protection SystemDocumento31 pagineGenerator Protection Systemmuaz_aminu1422100% (1)
- 2 Relay Products Automotive Catalog PDFDocumento158 pagine2 Relay Products Automotive Catalog PDFmarcosNessuna valutazione finora
- BL2000-BHT-V22ENGLISH Two Speed PDFDocumento48 pagineBL2000-BHT-V22ENGLISH Two Speed PDFhabibulla50% (2)
- High Efficiency Single Synchronous Buck PWM Controller: RT8240A/B/CDocumento17 pagineHigh Efficiency Single Synchronous Buck PWM Controller: RT8240A/B/Ckamil_yilmaz_6Nessuna valutazione finora
- DC-DC Step-Down FelixDocumento31 pagineDC-DC Step-Down FelixGFGHJHKNessuna valutazione finora
- DS-119-8-EN - Exertherm - IEC LV MCC Modbus Solution DatasheetDocumento4 pagineDS-119-8-EN - Exertherm - IEC LV MCC Modbus Solution DatasheetHUY NGUYỄNNessuna valutazione finora
- Lap Vs ConcentricDocumento7 pagineLap Vs ConcentricAmr Diaa El-Din El-FawalNessuna valutazione finora
- Datasheet Q48 Point To Point (PD8630)Documento2 pagineDatasheet Q48 Point To Point (PD8630)Ricky YoungNessuna valutazione finora
- BA DirectDocumento17 pagineBA DirectRam RajyaNessuna valutazione finora
- Ultrasonic Scissors 98-Kxxx MA R01.01 en-GB 03-4821Documento2 pagineUltrasonic Scissors 98-Kxxx MA R01.01 en-GB 03-4821Alejandro de la CruzNessuna valutazione finora
- 4.9 Grounding: Wiring The S7-400Documento2 pagine4.9 Grounding: Wiring The S7-400Mathivanan AnbazhaganNessuna valutazione finora