Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Invers or China
Caricato da
and25skyDescrizione originale:
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Invers or China
Caricato da
and25skyCopyright:
Formati disponibili
. Introduction.....................................................................................................
1. Checks upon Delivery.............................................................................................................
2. Nameplate Description of Inverter.........................................................................................
. Safety Precautions.........................................................................................
1. Before the Power-up...............................................................................................................
2. During the Power-up...............................................................................................................
. During the !peration..............................................................................................................
. Standards and Specifications.......................................................................
1. Particular "pecifications.........................................................................................................
2. #eneral "pecifications............................................................................................................
. Storage and Installation..................................................................................
1. "torage....................................................................................................................................
2. Installation "ite an$ %nvironment...........................................................................................
. Installation an$ Direction........................................................................................................
. Wiring...........................................................................................................
1. &ain Circuit 'iring "chematic Diagram.............................................................................
2. Description of (erminal Block..............................................................................................
. Basic Connection Diagram...................................................................................................
). Precautions on 'iring...........................................................................................................
. Instruction of the Digital Operator................................................................
1. Description of the Digital !perator..........................................................................................
2. Description of In$icator *amp "tatus...................................................................................
. Description of !peration %+amples......................................................................................
. Commissioning................................................................................................
1. Checks ,efore the Commissioning.......................................................................................
2. Commissioning ðo$s......................................................................................................
. Function List....................................................................................................
. Descriptions of Functions...............................................................................
. Care & Maintenance Fault Information and !rou"leshooting..................
1. Precautions a,out Inspection an$ &aintenance....................................................................
2. Perio$ical Inspection an$ &aintenance items......................................................................
. -ault In$ication an$ (rou,leshooting...................................................................................
). -aults an$ .nalysis...............................................................................................................
. Selection of Peripheral De#ices and Disposition...........................................
1. !ptions..................................................................................................................................
2. Disposition............................................................................................................................
. $ser Preferences !a"le................................................................................
%ote& Due to product uPdates the manual is su"'ect to change (ithout notice.
. Introduction
(hank you for purchasing an$ using the general-purpose inverter of multi-functions an$ high
performance.
Please rea$ carefully the operation manual ,efore putting the inverter to use so as to correctly
install an$ operate the inverter/ give full play to its functions an$ ensure the safety. Please keep the
operation manual han$y for future reference/ maintenance/ inspection an$ repair.
Due to the inverter of a kin$ of electrical an$ electronic pro$uct it must ,e installe$/ teste$ an$
a$0uste$ with parameters ,y speciali1e$ engineering persons of motors.
(he marks of an$ other sym,ols in the manual remin$ you of the safety an$
prevention cautions $uring the han$ling/ installation/ running an$ inspection. Please follow these
instructions to make sure the safe use of the inverter. In case of any $ou,t please contact our local
agent for consultation. !ur professional persons are willing an$ rea$y to serve you.
(he manual is su,0ect to change without notice.
Danger in$icates (rong use may kill or in0ure people.
Caution in$icates wrong use may $amage the inverter or mechanical system.
Danger
Be sure to turn off the input power supply ,efore wiring.
Do not touch any internal electrical circuit or component when the charging lamp is still on after the
.C power supply is $isconnecte$/ which means the inverter still has high voltage insi$e an$ it is very
$angerous.
Do not check components an$ signals on the circuit ,oar$s $uring the operation.
Do not $issem,le or mo$ify any internal connecting cor$/ wiring or component of the inverter ,y
yourself.
Be sure to make correct groun$ connection of the earth terminal of the inverter.
Never remo$el it or e+change control ,oar$s an$ components ,y yourself. It may e+pose you to an
electrical shock or e+plosion/ etc.
Caution
Do not make any voltage-withstan$ing test with any component insi$e the inverter. (hese semi-
con$uctor parts are su,0ect to the $amage of high voltage.
Never connect the .C main circuit power supply to the output terminals 2.3 ' of the inverter.
(he main electric circuit ,oar$s of C&!" an$ IC of the inverter are su,0ect to the effect an$ $amage
of static electricity. Don4t touch the main circuit ,oar$s.
Installation/ testing an$ maintenance must ,e performe$ ,y 5ualifie$ professional personnel.
(he inverter shoul$ ,e $iscar$e$ as in$ustrial waste. It is for,i$$en to ,urn it.
). Chec*s upon Deli#ery
(he inverter has ,een strictly an$ well packe$ ,efore e+-work. In consi$eration of various factors
$uring the transportation special attention shoul$ ,e pai$ to the following points ,efore the
assem,ly an$ installation. If there is anything a,normal please notify the $ealer or the relevant
people of our company.
!
Danger Caution
!
Check if the inverter has got any $amage or $eformation $uring the transportation an$
han$ling.
Check if there is one piece inverter an$ one copy of the instruction manual availa,le when
unpacking it.
Check the information on the nameplate to see if the specifications meet your or$er
6!perating voltage an$ 73. value8.
Check if there is something wrong with the inner parts/ wiring an$ circuit ,oar$.
Check if each terminal is tightly locke$ an$ if there is any foreign article insi$e the inverter.
Check if the operator ,uttons are all right.
Check if the optional components you or$ere$ are containe$.
+. %ameplate Description of In#erter
I%P$! P9:;3<;91
O$!P$! P9:;31=.<.=.<7'
Fre,-.ange& ;.1);;91
/$0%10%2 3L3C!.O%ICS CO. L!D.
. Safety Precautions
). 4efore the Po(er-up
Caution
Check to ,e sure that the voltage of the main circuit .C power supply matches the input
voltage of the inverter.
(he sym,ol/ % / represents groun$ terminals. Be sure to make correct groun$ connection of
the earth terminals of the motor an$ the inverter for safety.
No contactor shoul$ ,e installe$ ,etween the power supply an$ the inverter to ,e use$ for
starting or stopping of the inverter. !therwise it will affect the service life of the inverter.
!
Danger
>.".( terminals are power input terminals/ never mi+e$ with 2.3.' terminals. Be sure that the
wiring of the main circuit is correct. !therwise it will cause $amages of the inverter when the
power is applie$ to it.
Caution
Do not carry the front cover of the inverter $irectly when han$ling. It shoul$ ,e han$le$ with
the ,ase to prevent the fall-off of the front cover an$ avoi$ the $ropping of the inverter/ which
may possi,ly cause the in0uries to people an$ the $amages to the inverter.
&ount the inverter on a metal or other noncom,usti,le material to avoi$ the risk of fire.
Install the inverter in a safe location/ avoi$ing high temperature/ $irect sunlight/ humi$ air or
water.
7eep the inverter from the reach of chil$ren or persons not concerne$.
(he inverter can only ,e use$ at the places accre$ite$ ,y our company. .ny unauthori1e$
working environment may have the risks of fire/ gas e+plosion/ electric shock an$ other
inci$ents.
Install a heat sink or other cooling $evice when installing more than one inverter in the same
enclosure so that the temperature insi$e the enclosure ,e kept ,elow ); to avoi$ overheat or
the risk of fire.
Be sure to turn off the power supply ,efore $issem,ling or assem,ling the operation keypanel
an$ fi+ing the front cover to avoi$ ,a$ contact causing faults or non-$isplay of the operator.
Do not install the inverter in a space with e+plosive gas to avoi$ the risk of e+plosion.
If the inverter is use$ at or a,ove 1;;;m a,ove seal level/ the cooling efficiency will ,e worse/
so please run it ,y $e-rating.
Do not install any contactor an$ other components of capacitor or varistor on the output si$e of
the inverter. !therwise it will cause malfunctions an$ $amages of components of the inverter.
Do not install any switch component like air circuit ,reaker or contactor at the output of the
inverter. If any of such components must ,e installe$ ,ecause of the re5uirements of process
an$ others/ it must ,e ensure$ that the inverter has no output when the switch acts. In a$$ition/
it is for,i$$en to install any capacitor for improvement of power factor or any varistor against
thun$er at the output. !therwise it will cause malfunctions/ tripping protection an$ $amages of
components of the inverter. Please remove them as shown in the ,elow $iagram.
It will affect the service life of the inverter if a contact is connecte$ to the front en$ of input of
the inverter to control its starts an$ stops. #enerally it is re5uire$ to control it through -!> or
>%3 terminals. "pecial attention shoul$ ,e pai$ to its use in the case of fre5uent starts an$
stops.
Please use an in$epen$ent power supply for the inverter. Do avoi$ using the common power
supply with an electrical wel$er an$ other e5uipment with strong $istur,ance. !therwise it will
cause the protection or even $amage of the inverter.
!
2
Inverter 3
'
M
7&
?
?
+. During the Po(er-up
Danger
Do not plug the connectors of the inverter $uring the power up to avoi$ any surge into
the main control ,oar$ $ue to plugging/ which might cause the $amage of the inverter.
.lways have the protective cover in place ,efore the power up to avoi$ electrical
shock in0ury.
5. During the Operation
Danger
Never connect or $isconnect the motor set while the inverter is in running. !therwise it
will cause over-current trip an$ even ,urn up the main circuit of the inverter.
Never remove the front cover of the inverter while the inverter is powere$ up to avoi$
any in0ury of electric shock.
Do not come close to the machine when the fault restart function is use$ to avoi$
anything une+pecte$. (he motor may automatically restart after its stop.
(he function of "(!P "witch is only vali$ after setting/ which is $ifferent with the use
of emergent stop switch. Please pay attention to it when using it.
Caution
Do not touch the heat sink/ ,raking resistor/ or other heat elements to avoi$ ,eing scal$.
Be sure that the motor an$ machine is within the applica,le spee$ ranges ,efore
starting operation ,ecause the inverter is 5uite easy to run from lower spee$ to higher spee$.
Do not check the signals on circuit ,oar$s while the inverter is running to avoi$ $anger.
Be careful when changing the inverter settings. (he inverter has ,een a$0uste$ an$ set
,efore e+-work. Do not a$0ust it wantonly. Please make proper a$0ustments accor$ing to the
re5uire$ functions.
Do consi$er the vi,ration/ noise an$ the spee$ limit of the motor ,earings an$ the
mechanical $evices when the inverter is running at or a,ove the fre5uency of <;91.
. Standards and Specifications
). Particular Specifications
Input 3oltage Power
67'8
Inverter
Capacity
673.8
!utput
Current
6.8
"uita,le &otor
67'8
"ingle @ (hree Phase
22;3 <;91
;.) 1.; 2.< ;.)
"ingle @ (hree Phase
22;3 <;91
;.=< 2.; <.; ;.=<
"ingle @ (hree Phase
22;3 <;91
1.< 2.: =.; 1.<
"ingle @ (hree Phase
22;3 <;91
2.2 ).) 11 2.2
A:;3 <;91 ;.=< 2.2 2.=
;.=<
A:;3 <;91 1.< .2 ).; 1.<
A:;3 <;91 2.2 ).; <.; 2.2
A:;3 <;91 .= B.: :.< .=
A:;3 <;91 <.< 1; 12.< <.<
A:;3 <;91 =.< 1) 1=.< =.<
A:;3 <;91 11 1C 2) 11
A:;3 <;91 1< 2B 1<
A:;3 <;91 1:.< 2 ); 1:.<
A:;3 <;91 22 = )= 22
A:;3 <;91 ; <2 B< ;
A:;3 <;91 = B) :; =
!
A:;3 <;91 )< =2 C1 )<
A:;3 <;91 << :) 11; <<
A:;3 <;91 =< 11B 1<2 =<
A:;3 <;91 C; 1) 1=B C;
A:;3 <;91 11; 1B; 21; 11;
A:;3 <;91 12 1C 2< 12
A:;3 <;91 1B; 2; ;) 1B;
A:;3 <;91 1:< 2B; ); 1:<
A:;3 <;91 2;; 2C; :; 2;;
A:;3 <;91 22; 2< )2B 22;
A:;3 <;91 2<; ):1 ):; 2<;
A:;3 <;91 2:; )2= <B; 2:;
A:;3 <;91 ;; )<; <:; ;;
A:;3 <;91 1< )B; B;< 1<
+. 2eneral Specifications
Control &o$e "P'&
Input Power ;D));3for :;3 power1=;D2);for 22;3 power
<-Digits Display @
"tatus In$icator
*amp
Displaying fre5uency/ current/ revolution/ voltage/ counter/ temperature/
forwar$ or reserve running/ an$ fault/ etc.
Communication
Control
>"-):<
!peration
(emperature
-1;D);
9umi$ity ;-C<E >elative 9umi$itywithout $ew
3i,ration Below ;.<#
-
r
e
5
u
e
n
c
y
C
o
n
t
r
o
l
>ange ;.1;D);;.;;91
.ccuracy Digital;.;1E-1;D);/ .nalog;.1E 2<F1;
"etting
>esolution
Digital;.;191/ .nalog1 of &a+. !perating -re5uency
!utput
>esolution
;.;191
!perator "etting
ðo$
Press $irectly to set.
.nalog "etting
ðo$
%+ternal 3oltage ;-<3;-1;3)-2;m.;-2;m..
!ther -unctions -re5uency lower limit/ starting fre5uency/ stopping fre5uency/ three skip
fre5uencies can ,e respectively set.
>amp Control "electa,le )-spee$ steps ramp-up an$ -$own time 6;.1-B<;;s8.
3G- Curve "et 3G- curve at will
#
e
n
e
r
a
l
C
o
n
t
r
o
l
(or5ue Control (or5ue increase is setta,le ,y ma+. 1;.;E. (he starting tor5ue can reach 1<;E
at 1.;91.
&ulti-Inputs B multi-function input terminals for :Hspee$ steps control/ program operation/
switching of )-spee$ >amp/ 2PGD!'N function/ counter/ e+ternal emergency
stop an$ other functions.
&ulti-!utputs < multi-function output terminals for $isplaying of running/ 1ero spee$/
counter/ e+ternal a,normity/ program operation an$ other information an$
warnings.
!ther -unctions .3> 6auto voltage regulation8/ Deceleration stop or free-stop/ DC ,rake/ auto
reset an$ restart/ fre5uency track/ P*C control/ traverse function/ $rawing
control/ auto energy-savings/ carrier a$0usta,le ,y ma+. 1B791/ etc.
P
r
o
t
e
c
t
i
o
n
-
u
n
c
t
i
o
n
s
!verloa$
Protection
%lectronic relay protection motor
Drivefor constant tor5ue 1<;EG1 min. for the kin$s of fan 12;EG1min.
-2"%
Protection
-2"% ,roken/ &otor stops.
!ver-voltage DC 3oltage );;3 for 22;3 class
DC 3oltage :;;3 for :;3 class
*ow 3oltage DC 3oltage 2;;3 for 22;3 class
DC 3oltage );;3 for :;3 class
Instant "top an$
>estart
>estarte$ ,y fre5uency track after instantaneous stop.
"tall Prevention .nti-stall $uring .ccGDec run
!utput %n$
"horts
%lectronic circuit protecting
!ther -unctions -in over-heat protection/ restriction of reverse running/ $irect start after power
on/ fault reset/ parameter lock PID/ one-$rive-more/ etc.
. Storage and Installation
). Storage
(he inverter must ,e kept in its original package ,o+ ,efore installation. Pay attention to the
followings when keeping it in storage if the inverter is not use$ for the time ,eingI
It must ,e store$ in a $ry place without ru,,ish or $ust.
(he suita,le temperature for storage is ,etween -2; an$ JB<.
(he relative humi$ity re5uire$ is ;-C<E without con$ensation.
(here is no corrosive gas or li5ui$ in the storage am,ience.
It4s ,etter to lay the inverter on a rack an$ keep it in a proper package.
It is ,etter not to store the inverter for long time. *ong time storage of the inverter will lea$ to
the $eterioration of electrolytic capacity. If it nee$s to ,e store$ for a long time make sure to
power it up one time within a year an$ the power-up time shoul$ ,e at least a,ove five hours.
'hen powere$ up the voltage must ,e increase$ slowly with a voltage regulator to the rate$
voltage value.
+. Installation Site and 3n#ironment
(he inverter shoul$ ,e installe$ at the following locationI
.m,ient temperature -< to ); with goo$ ventilation.
No water $rop an$ low moisture.
-ree from $irect sunshine/ high temperature an$ heavy $ust fall.
-ree from corrosive gas or li5ui$.
*ess $ust/ oil gas an$ metallic particles
-ree from vi,ration an$ easy for service an$ inspection.
-ree from the interference of electromagnetic noise.
0ttention& !he am"ient conditions of the in#erter (ill affect its ser#ice life.
5. Installation and Direction
(here must ,e enough space left aroun$ the inverter for easy maintenance an$ cooling. "ee
Diagram .
(he inverter must ,e installe$ vertically with the smooth ventilation for effective cooling.
If there is any insta,ility when installing the inverter/ please put a flat ,oar$ un$er the
inverter ,ottom ,ase an$ install it again. If the inverter is installe$ on a loose surface/ stress
may cause $amage of parts in the main circuit so as to $amage the inverter.
(he inverter shoul$ ,e installe$ on non-com,usti,le materials/ such as iron plate.
If several inverters are installe$/ upper an$ lower/ together in one ca,inet/ please a$$ heat
$issipation plates an$ leave enough space ,etween the inverters. "ee Diagram.
. Wiring
). Main Circuit Wiring Schematic Diagram67
Power supplyI
3erify that the inverter4s rate$ voltage coinci$es with .C power supply voltage to avoi$
a $amage of the inverter.
No fuse ,reakerI
>efer to the relate$ list.
!
HY-
A
CAUTIO
N
High voltage Inaide
WARNIN
G
Do not connect AC power to output turbinals(U.V.W
Dischargi ng ti !e l e greater than " ancones.
Do not #nspect co!ponents unl ess Insi de $CHA%&'(
la!p Is turned o)t.
$%I!&
mm
"*
"*
+
,
*
+
,
*
#roun$ fault circuit interrupter
2se one of anti-high harmonic.
%lectromagnetic contactorI
NoteI Do not use the electromagnetic contactor as the onGoff ,utton of power supply for
the inverter.
.C reactorI
It is recommen$e$ to install an .C reactor for power factor improvement if the input
capacity is more than 1;;;73..
InverterI
Be sure to make correct connections of the main circuit wires an$ control signal wires of
the inverter.
Be sure to make correct setting of parameters for the inverter.
+. Description of !erminal 4loc*
1.rrangement of &ain circuit (erminals
%
> " ( 2 3 ' PJ P>
%
> " ( 2 3 ' P P>
%
> " ( 2 3 ' P1 P P>
>
" ( % P N 2 3 '
% > " ( 2 3 ' PJ P>
>
" ( % P P1 N 2 3 '
62.rrangement of Control Circuit (erminals
2P- D>3 DC& "P* "P& "P9 >"( >%3 -!> -!>
-. -C -B D>3 J1; 3I .I .C& .& >"- >"J
-unction Description of &ain circuit (erminals
"ym,ol -unction Description
>.".(
Input terminal of .C line power. 22;3 class/ for ,oth singleGthree phase/
single phase connecte$ to any two phases
2.3.' !utput terminal of the inverter
P.Pr Connector for ,raking resistor.
P1P Connector for DC reactor 6'hen using a DC reactor the 0umper shall ,e
remove$. .;<D<)B an$ .;=D<)B internally 0umpe$8
P!N Connecting terminal of e+ternal ,raking ,ank.
% #roun$ terminalI the thir$ metho$ of groun$ing for 22;3 an$ special
groun$ing for :; 3 of %lectrical %ngineering >egulations.
)-unction Description of Control Circuit (erminals
"ym,ol
-unction Description -actory setting
-!>
&ulti-Input 1 -orwar$ run
>%3 &ulti-Input 2 >everse run
>"( &ulti-Input >eset
"P9 &ulti-Input ) 9igh spee$
"P& &ulti-Input < &i$$le "pee$
"P* &ulti-Input B *ow "pee$
DC& Common (erminal of Digital an$ Control
"ignals/ J12v Power/
%3!IP3!P2)#roun$
%3IP3 J123 Power "upply &a+. output current 2;;m.
P2) J123 Power "upply &a+. output current 2;;m.
J1; Power "upply for "pee$ "etting J1;3
3I .nalog 3oltage -re5uency >eference
Input
;DJ1;3 correspon$ing to the
highest operating fre5uency
.I .nalog Current -re5uency >eference )D2;m. correspon$ing to the
Input highest operating fre5uency
.C& Common (erminal of .nalog an$ Control
"ignals
D>3 &ulti-!utput 1 6!ptical couple output8 DC2)3G1;;m.
2P- &ulti-!utput 2 6!ptical couple output8
-.%-.!
-B%-B!
-C%-C
&ulti-!utput 6NG! or NGC8 .G2<;3.C
7.%7.!
7B%7B
&ulti-!utput ) 6NG!8 .G2<;3.C
.& !utput terminals of $igital fre5uency ;D1;3
>"J >"- >"):< Communication port
5. 4asic Connection Diagram
(he wiring of the inverter is $ivi$e$ into two parts/ main circuit terminal connections an$ control
circuit terminal connections. (he user can see the main circuit terminals/ an$ the control circuit
terminals after removing the cover of enclosure. (he terminals must ,e connecte$ correctly as the
following wiring circuit $iagrams.
8. Precautions on Wiring
18 -or the main circuit wiringI
'hile wiring the si1es an$ specifications of wires shoul$ ,e selecte$ an$ the wiring shoul$
,e e+ecute$ accor$ing to the electrical engineering regulations to ensure the safety.
It is ,etter to use shiel$e$ wire or wire an$ con$uit for power cor$ an$ groun$ the shiel$e$
layer or two en$s of wire con$uit.
Be sure to install a Non -use Breaker 6N-B8 ,etween the power supply an$ the input
terminals 6>.".(8. 6If using groun$ fault circuit interrupter/ please choose one correspon$ing
to high fre5uency8
Never connect .C power to the output terminal 62.3.'8 of the inverter.
!utput wires mustn4t ,e in touch of the metal part of the inverter enclosure/ or it will result in
earth short-circuit.
Phase-shifting capacitors/ *C/ >C noise filters/ etc/ can never ,e connecte$ to the output
terminals of the inverter.
(he main circuit wire must ,e enough far away from other control e5uipments.
'hen the wiring ,etween the inverter an$ the motor e+cee$s 1< meters for 22;3 class or ;
meters for :;3 class/ much higher $3G$( will ,e pro$uce$ insi$e the coil of the motor/
which will cause the $estruction to the interlay or insulation of the motor. Please use a
$e$icate$ .C motor for the inverter or a$$ a reactor at the inverter.
Please lower the carrier fre5uency when there is a longer $istance ,etween the inverter an$
the motor. Because the higher the carrier fre5uency is the ,igger the leakage current of high-
or$er harmonics in the ca,les will ,e. (he leakage current will have unfavora,le effect on the
inverter an$ other e5uipment.
2 -or control circuit wiring 6signal line8
(he signal line shoul$ ,e separately lai$ in a $ifferent con$uit with the main circuit wire to
avoi$ any possi,le interference.
Please use the shiel$e$ ca,le with the si1e of ;.<-2mm
2
for signal lines.
2se the control terminals on the control panel correctly accor$ing to your nee$s.
#roun$ing
#roun$ing terminal %. Be sure to make correct groun$ing
22;3 classI (he thir$ groun$ing metho$ 6#roun$ing resistance shoul$ ,e 1;;K or lower.8
:;3 classI (he special thir$ groun$ing metho$ 6#roun$ing resistance shoul$ ,e 1;K or
lower.8
Choose groun$ing wires accor$ing to the ,asic length an$ si1e of the technical re5uirements
of the electric e5uipment.
Do avoi$ sharing groun$ing wire with other large power e5uipment such as electric wel$er/
power machine/ etc. (he groun$ing wire shoul$ ,e kept away from the power supply wires
for large power e5uipment.
(he groun$ing metho$ for several inverters together shoul$ ,e $one as the first an$ secon$
$iagrams ,elow. .voi$ the thir$ loop.
(he groun$ing wire must ,e as shorter as possi,le.
1#oo$ 2#oo$ Not goo$
. Instruction of the Digital Operator
). Description of the Digital Operator
-.% %'V H/ A %0!in
"#$ $&'()*+ ,-./
&.0&1*2&.3 4-567
8/967 :5/;</.1+7
1<55/.27
5/9-)<2&-.7 /216
=*&. $&'()*+ ,-./
&.0&1*2&.3 :5/;</.1+7
1<55/.27 >? @7 $? @7
5/9-)<2&-.7 1-<.2/57
2/A(/5*2<5/7 /216
4<.12&-. B/+ 4C8D8#@ EF&21G
@*)</ 1G*.3/ B/+
EG&:2 B/+
8<. B/+
H*56'/2 B/+
E2-(D8/'/2 B/+
-
0
%
1%.&
'23'%
%U2
43.1
%'4'3
H#5D***,
%U2
+. Description of Indicator Lamp Status
) Description of Indicator Lamp Status
In$icator lamp "tatus Description
-!> on (he motor is in forwar$ rotation.
>%3 on (he motor is in reverse rotation.
9L on Displaying set fre5uency or output fre5uency.
. on Displaying output current.
>!(( on Displaying rate$ motor revolution
. >!(( on Displaying .C or DC voltage.
9L >!(( on Displaying counting value.
9L . >!(( on Displaying internal temperature of the inerter.
+ Description of Display Items
5. Description of Operation 39amples
Proce$ures Display In$icator
*amp
%+planation
Power up/
!peration of
Dsp2.; flash
3r2.;;
-!> 9L
M N
"elf $etect when power-up/ $isplay
version no. 6-lashing8 an$ finally set
H5/'/.2 &.9/52/5I' 2/A(/5*2<5/ &'
JK6LOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOO
OOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOO
OOOOOOOOOOOOOOOOOOOOOOOOOOOOO
=/*.&.3 M.0&16)*A( -.
H5/'/.2 -<2(<2 :5/;</.1+ &' KL6LLN,
J6L>
OPPL5DA&.
KOL6O@
JQL6L@
H5/'/.2 2*53/2 9*)</ -: HM$ &' KL6LR
M
H5/'/.2 '/2 :5/;</.1+ &' KL6LLN,
H5/'/.2 -<2(<2 1<55/.2 &'
H5/'/.2 -<2(<2 5/9-)<2&-. &'
H5/'/.2 $? 9-)2*3/ &'
H5/'/.2 >? 9-)2*3/ &'
H5/'/.2 1-<.2/5I' 9*)</ &' OLK
H5/'/.2 ://0S*1B 9*)</ -: HM$ &' PQ6LR
H5/'/.2 2&A/ -: (-F/5T-. &' OU G-<5'
V-2*) 5<. 2&A/ -: &.9/52/5 &' OLQ
G-<5'
$&'()*+
power ;;;.;; fre5uency.
P>!# PD;;; -!> 9L
M N
%nter programming
Display the function of PD;;;
%NP%> ;;;.;; -!> 9L
M N
Display the contents of PD;;;
%N(%>
P>!#
<;.;;
%ND <;.;;
PD;;1
;<;.;
-!> 9L
M N
-!> 9L
M N
Change the content of PD;;;
Confirm change$ value.
Display %ND <;.;; PD;;1
Back from programming
>2N
<;.;; -!> 9L
N N
Display running an$ operating
fre5uency
DI"P
<;.;;
;.;; < ;.;;
-!> 9L
N N
&onitor screen switching/ $isplay
output current
P>!#
;;<.; -!> 9L
N N
&onitor screen switching/ $isplay
output current
DI"P
;1)); -!> .
N N
&onitor screen switching/ $isplay
revolution
P>!#
<;.;; -!> >!((
N N
"witch ,ack to main screen/ $isplay set
fre5uency
-G>
<;.;; -!> 9L
N N
"witch of -or.>ev. rotation/ $isplay the
status of >ev rotation
;<;.; -!> 9L
N N
"witch to a$0usta,le fre5uency
;;.;; -!> 9L
N N
.$0ust set fre5uency/ i.e. the value of
PD;;;
%N(%>
;;.;; -!> 9L
N N
Confirm change$ value/ write to
PD;;; as value
"(!P
;.;; -!> 9L
M N
"top
%ote&
W M means flashing. N means ,right.
X-or monitoring .C/ DC/ ( an$ other items they can ,e only switche$ an$ $isplaye$ after the
parameter setting.
Y 'hen it is powere$ up again after a power ,reak$own the inverter will $isplay the screen
previous to the power ,reak$own after its self $etection.
. Commissioning
). Important Chec*s "efore the Commissioning
If there is any wrong connecte$ wiresQ Pay special attention to the terminal of 2.3.'R &ake
sure the power supply wires are connecte$ to >.".(/ not 2.3.'.
If there is any metal pow$er or wires left on the ,ase plate of the inverter or the terminal
,lock/ which may cause short circuit.
If screws are tightly locke$ an$ if the connecting parts are loose.
If there is any short circuit or earth fault at outputs.
+. Commissioning Methods
(he proce$ure of the operator is factory set up for the control. (he commissioning can ,e carrie$
out through the $igital operator. #enerally/ the commissioning can ,e con$ucte$ at <.;; 91.
Proce$ures Display In$icator *amp %+planation
Power up
Z
$sp1.1[3r2.;
;;;.;
-!> 91
M N
"elf $etect when power up/
$isplay version no. an$ finally
set fre5uency
\ ;;;.;;
-!> 91
M N
"witch to a$0usta,le
fre5uency on the panel
Z
\
;<;.;;
-!> 91
M N
Change set fre5uency/ i.e. the
value of PD;;
Z
%N(%>
<;.;;
-!> 91
M N
Confirm change$ value
Z
>2N
<;.;;
-!> 91
N N
>un at <;91
Z
"(!P
<;.;;
-!> 91
M N
"top
NoteI N means in$icator lamps is onR M means in$icator lamps flashR
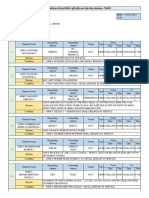
Categ
ory
Co$e -unction "et >ange @ -unction
%+planation
-actory
"etting
B
a
s
i
c
P
a
r
a
m
e
t
e
r
s
PD;;; Parameter *ock ;Invali$ 13ali$ ;
PD;;1 "ource of >un
Comman$s
;!perator 1%+ternal terminal
2Communication port
;
PD;;2 "ource of !perating
-re5uency
;!perator 1%+ternal terminal
2Communication port
;
PD;; &ain -re5uency ;.;;D);;.;; 91 ;.;;
PD;;) Base -re5uency ;.;1D);;.;; 91 <;.;;
PD;;< &a+ !perating
-re5uency
<;.;;D);;.;; 91 <;.;;
PD;;B Interme$iate -re5uency ;.;1D);;.;; 91 2.<;G.;
PD;;= &in. -re5uency ;.;1D2;.;; 91 ;.<;
PD;;: &a+. 3oltage ;.13]S 22;G:;
PD;;C Interme$iate 3oltage ;.13]S S
PD;1; &in. 3oltage ;.1D<;.;3 S
PD;11 -re5uency *ower *imit ;.;;D);;.;; 91 ;.;;
PD;12 >eserve$
PD;1 Parameter >eset ;;D1; ;:>estore the factory
setting. No other function.
;;
PD;1) .ccel. (ime 1 ;.1DB<;;.;" S
PD;1< Decel. (ime 1 ;.1DB<;;.;" S
PD;1B .ccel. (ime 2 ;.1DB<;;.;" S
PD;1= Decel. (ime 2 ;.1DB<;;.;" S
PD;1: .ccel. (ime ;.1DB<;;.;" S
PD;1C Decel. (ime ;.1DB<;;.;" S
PD;2; .ccel. (ime ) ;.1DB<;;.;" S
PD;21 Decel. (ime ) ;.1DB<;;.;" S
PD;22 >eserve$
PD;2 >ev. >otation "elect ;I >ev >un for,i$$enR 1>ev >un
%na,le
1
PD;2) "(!P key select ;"(!P Invali$ 1"(!P 3ali$ 1
PD;2< "tarting &o$e ;"tart from "tarting -re5uency
1-re5uency track start
;
PD;2B "topping &o$e ;Decelerating stop
1Coasting stop
;
PD;2= "tarting -re5uency ;.1D1;.; 91 ;.<
PD;2: "topping -re5uency ;.1D1;.; 91 ;.<
PD;1
PD;2C
PD;;
PD;2
PD;
DC Braking level
DC Braking time at
start
DC Braking time at
stop
-re5uency track time
Current level for
fre5uency track
;.;D2;.;E
;.;D2<.;"
;.;D2<.;"
;.;D2;.;"
;D2;;E
2.;
;.;
;.;
<.;
1<;
PD;) 3oltage rise time $uring
fre5uency track
;.<
PD;<-
PD;);
>eserve$
PD;)1 Carrier fre5uency ;D1< S
PD;)2 Togging -re5uency ;.;;D);;.;; 91 <.;;
PD;) "-Curve (ime ;DB<;;" ;
SPD;)) &ulti-input 16-!>8 ;I Invali$R 1I>unR 2I -or rotationR I
>ev rotationR )I "topR <I -!>G>%3.R BI
TogR =I Tog -or rotationR :I Tog >ev
>otationR CI %mergent stopR 1;I >esetR
11I>eserve$R 12I !verheat of heat
sink or motorR 1=I 9igh spee$R &i$$le
spee$R 1CI *ow spee$R 2;I &ulti-
spee$ 1R 21I &ulti-spee$ 2R 22I &ulti-
spee$ R 2I >amp select 1R 2)I >amp
select 2R 2<I 2P functionR 2BI D!'N
functionR 2=I Counter 2:I Counter
resetR 2CI DrawingR 2I PID "tart
;2
SPD;)< &ulti-input 26>%38 ;
SPD;)B &ulti-input 6>"(8 1)
SPD;)= &ulti-input )6"P98 22
SPD;): &ulti-input <6"P&8 2
SPD;)C &ulti-input B6"P*8 2)
SPD;<; &ulti-output 16D>38 ;I Invali$R 1I >unR 2I -ault in$icationR
I Lero "pee$R )I Braking in$icationR
<I "et -re5uency reachR BI .r,itrary
-re5uency 1 reachR
;1
SPD;<1 &ulti-output 262P-8 ;<
SPD;<2 &ulti-output
6(erminals of
-./-B/-C8
;2
SPD;< &ulti-output
)6(erminals of 7./7B8
=I .r,itrary -re5uency 2 reachR :I In
.ccel.R CI In Decel.R 1;I Inverter
!verloa$ alarmR 11I &otor !verloa$
alarmR 12I !ver-tor5ue alarmR 1I
*ow voltage alarmR 1)I "ingle stage
en$ in$icationR 1<I Process en$
in$icationR 1BI Counter reachR 2=I
Drawing reachR 2:IPID lower limit
alarmR 2CI PID upper limit alarmR ;I
-an actR 1I >eserve$R 2I Braking
resistor act
;;
PD;<) &ulti-output <6.&8 !utput of $igital fre5uency signals ;
PD;<< .& .nalog output
#ain
;.;D1;;.;E 1;;
PD;<B "kip -re5uency 1 ;.;;D);;.;; 91 ;.;;
PD;<= "kip -re5uency 2 ;.;;D);;.;; 91 ;.;;
PD;<: "kip -re5uency ;.;;D);;.;; 91 ;.;;
PD;<C "kip -re5uency >ange ;.;;D2.;; 91 ;.<
PD;B; 2niform -re5uency 1 ;.;;D);;.;; 91 ;.;;
PD;B1 2niform -re5uency 2 ;.;;D);;.;; 91 ;.;;
PD;B2 2niform -re5uency
>ange
;.1;D1;.;; 91 ;.<;
PD;B (imer 1 time ;D1;.; ;.;1
PD;B) (imer 2 time ;D1;; ;.;1
PD;B< Counting value set ;;DB<<;; ;;
PD;BB Interme$iate Counter ;DB<<;; ;
PD;B=-
PD;BC
>eserve$
.ppl
ica,l
e
Para
mete
rs
PD;=; .nalog Input ;D1; ;
PD;=1 .nalog -iltering
Constant
;D<; 2;
PD;=
PD;=<
PD;=2
PD;=)
*ower .nalog
-re5uency Bias
Direction at *ower
-re5uency
9igher .nalog
-re5uency
Bias Direction at
9igher -re5uency
;.;;D);;.;; 91
; Positive $irection 1 Negative
$irection
;.;;D);;.;; 91
; Positive $irection 1 Negative
$irection
;
;
<;.;;
;
PD;=B .nalog Negative Bias
>everse
;Not allowa,le. 1.llowa,le. ;
PD;== 2pGDown -unction ;Not memori1e$ 1&emori1e$ 1
PD;=: 2pGDown "pee$ ;;.;19L 1;.19L ;
PD;=C >eserve$
PD;:; P*C !peration ;Normal runR 1I %+ternal control )
-spee$R 2I%+ternal control multi-
spee$R I Distur,anceR )I Internal
control multi-spee$R <I Drawing
;
PD;:1 .utoP*C ;"top after running for one cycleR
1Cycling runR 2.uto stop after
running for one cycle 6"(!P for
intervention8R I .uto >un an$
Cycling 6"(!P for intervention8
;
PD;:2 P*C rotation Direction ;D2<< ;-or 1>ev ;
PD;: ;D2<< ;-or 1>ev
PD;:) P*C >amp (ime ;DB<<< ;
PD;:< ;DB<<<
PD;:B
PD;:=
PD;::
PD;:C
PD;C;
PD;C1
PD;C2
PD;C
PD;C)
PD;C<
PD;CB
PD;C=
PD;C:
PD;CC
PD1;;
-re5uency 2
-re5uency
-re5uency )
-re5uency <
-re5uency B
-re5uency =
-re5uency :
-re5uency C
-re5uency 1;
-re5uency 11
-re5uency 12
-re5uency 1
-re5uency 1)
-re5uency 1<
-re5uency 1B
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
;.;;-);;.;; 91
1<.;;
2;.;;
2<.;;
;.;;
<.;;
);.;;
;.<;
1;.;;
1<.;;
2;.;;
2<.;;
;.;;
<.;;
);.;;
)<.;;
PD1;1
PD1;2
PD1;
PD1;)
PD1;<
PD1;B
PD1;=
PD1;:
PD1;C
PD11;
PD111
PD112
PD11
PD11)
PD11<
PD11B
(imer 1
(imer 2
(imer
(imer )
(imer <
(imer B
(imer =
(imer :
(imer CS
(imer 1;
(imer 11
(imer 12
(imer 1
(imer 1)
(imer 1<
(imer 1B
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
;.;-B<;;.;"
1;.;
1;.;
;.;
;.;
;.;
;.;
;.;
;.;
;.;
;.;
;.;
;.;
;.;
;.;
;.;
;.;
Cate
gory
Co$e -unctions "et >ange @ -unction %+planation -actory
"etting
PD11= .utoP*C &emory ;D1 ;
PD11:
PD11C
PD12;
PD122
!ver-voltage "tall
Prevention
"tall Prevention *evel
at .ccel.
"tall Prevention *evel
at Constant "pee$
"tall Prevention *evel
at Decel.
;Invali$ 13ali$
;D2;;E
;D2;;E
;D2;;E
1
1<;
;
1<;
PD12 !ver-tor5ue Detect
&o$e
;D ;
PD12)
PD12<
!ver-tor5ue Detect
*evel
!ver-tor5ue Detect
(ime
;D2;;E
;.1D2;.;"
;
1.;
PD12=-
PD12C
>eserve$
PD1; Num,er of .u+iliary
Pump
;D2 ;
PD11 Continuous !perating
(ime of .u+. Pumps
1DC;;;mim 1
PD12 Interlocking (ime of
.u+. Pumps
1D2<;s <s
PD1 9igh "pee$ >unning
(ime
1D2<;s B;s
PD1) *ow "pee$ >unning
(ime
1D2<;s B;s
PD1< "topping 3oltage *evel 1D1<;E C<E
PD1B *asting (ime of
"topping 3oltage *evel
1D2<;s ;s
PD1= 'akeup *evel 1D1<;E :;E
PD1: "leep -re5uency ;.;;D);;.; 2;.;;
PD1C *asting (ime of "leep
-re5uency
1D2<;s 2;s
PD1); >eserve$
PD1)1
PD1)2
PD1)
PD1))
>ate$ &otor 3oltage
>ate$ &otor Current
&otor pole num,er.
>ate$ &otor
>evolution
"et accor$ing to &otor nameplate
"et accor$ing to &otor nameplate
;2]1;
;;]CCCC
S
S
;)
1));
PD1)< .uto (or5ue
Compensation
;.1]1;.; E 2.;E
PD1)B &otor no-loa$ current ;]CC );
PD1)= &otor slip
compensation
;.;]1;.; ;.;
PD1):-
PD1)C
>eserve$
PD1<
PD1<)
PD1<<
PD1<;
PD1<1
>estart after
Instantaneous "top
.llowa,le Power-
Break$own (ime
Num,er of .,normal
>estart
.uto 3oltage
>egulation
.uto %nergy "aving
;Invali$ 1-re5uency track
;.1D<.;"
;]1;
;Invali$ 13ali$
;D1;E
;
;.<
;;
1
;
PD1<B
PD1<=
PD1<:
PD1<C
PD1B;
PD1B1
PD1B2
Proportional Constant
6P8
Integral (ime 6I8
Differential (ime 6D8
(arget value
(arget value select
PID upper limit
PID lower limit
;.;D1;;;.;;E
;.1DB;;.;;"
;.;1D1;.;;"
;.;D1;;.;E
;I set ,y the operator 1set ,y
e+ternal terminals;-1;3
;D1;;E
;D1;;E
1;;E
<.;
;
;
;
1;;E
;E
PD1B
PD1B)
PD1B<
Communication
.$$resses
Communication Bau$
>ate
Communication Data
ðo$
;-2<;
;-
;-<
;
1
;
PD1=;
PD1=1
PD1BB
PD1=)
Display Items
Display Items !pen
3oltage >ating of
Inverter
>ate$ Current of
Inverter
;-<
;-=
"et accor$ing to the mo$el
"et accor$ing to the mo$el
;
;
S
S
PD1:1
PD1==
PD1=:
PD1=C
PD1:;
"oftware 3ersion
-ault >ecor$ 1
-ault >ecor$ 2
-ault >ecor$
-ault >ecor$ )
NoteI ]] means no fault recor$.
S
]]
]]
]]
]]
PD1=2 -ault Clear ;;]1; ;1 for -ault Clear ;;
PD1=< Inverter &o$el
PD1=B Inverter -re5uency
"tan$ar$
;<;91 1B;91 ;
PD1:2 &anufacture Date Pear&onth'eek S
PD1: "erial No. S
.
. Descriptions of Functions
PD;;; Parameter *ock SS
"et >ange;]1 2nit1 -actory "etting;
; Invali$.
1 3ali$/ i.e. the parameters are locke$. %+cept this parameter other parameters can not ,e
change$.
(his parameter is set to prevent non-maintenance personnel from setting other parameters ,y
mistake. .fter the parameters are locke$ the operating fre5uency can ,e change$ ,y pressing \ or
^.
PD;;1 "ource of !peration Comman$s
"et >ange;]2 2nit1 -actory "etting;
; "et ,y the !perator
!peration comman$s are given via the $igital operator.
1 "et ,y e+ternal terminals.
!peration comman$s are given via e+ternal terminals/ i.e. multi-input terminals
2 "et ,y communication ports.
!peration comman$s are given via communication ports.
PD;;2 "ource of !perating -re5uency
"et >ange;]2 2nit1 -actory "etting;
; "et ,y the operator. !perating fre5uency is given via the $igital operator.
1 "et ,y e+ternal terminals. !perating fre5uency is controlle$ ,y analog signals input via
e+ternal terminals. (he signal type is $etermine$ ,y PD;=;. -or the relate$ parameters refer to
PD;=;-PD;=B.
2 "et ,y communication ports. !perating fre5uency is given via the serial communication.
PD;; &ain -re5uency SS
"et >ange;.;;]);;.;; 91 2nit;.;1 91 -actory "etting;.;;
In the $igital operator mo$e/ the inverter will run at the set value of PD;;. During running/ the
operating fre5uency can ,e change$ ,y pressing _ or `. During multi-spee$ running/ the main
fre5uency is taken as the fre5uency of "pee$ 1.
In the e+ternal control multi-spee$ mo$e/ if PD;;2 is set to 1/ i.e. given ,y an e+ternal terminal/
"pee$ 1 will ,e given ,y the analog of the e+ternal terminal.
(he setting of main fre5uency is limite$ ,y the ma+imum operating fre5uency.
(he relate$ parameters of PD;;2/ PD;:; are a$0usta,le $uring operation.
PD;;) Base -re5uency
"et >ange;.;1]);;.;; 91 2nit;.191 -actory "etting<;.;;
(his parameter must ,e set accor$ing to the rate$ fre5uency of operating voltage on the motor4s
nameplate. 2n$er normal con$itions $o not change the set value of ,ase fre5uency at will. If it is
e5uippe$ with a special motor this value shoul$ ,e set properly accor$ing to the characteristics of
the motor4s parameters. !therwise it may cause the $amage to the e5uipment.
PD;;< &a+. !perating -re5uency
"et >ange1;.;;]);;.;; 91 2nit;.;1 91 -actory "etting<;.;;
(his parameter is set for the ma+imum operating fre5uency of the inverter.
(he following are several curves an$ set values often use$ for reference. "pecific curves must ,e
set accor$ing to concrete characteristics of mechanical loa$.
Curve of constant tor5ue Curve of lower tor5ue Curve of higher tor5ue
PD;;B Interme$iate -re5uency
"et >ange;.;1]);;.;; 91 2nit;.;1 91 -actory "etting2.<;
NoteI :: means this parameter is ad'usta"le during operation.
(his parameter is set for interme$iate fre5uency of ar,itrary 3G- curve. If it is set improperly/ it
will cause over-current or un$er-tor5ue of the motor/ or even tripping of the inverter.
(his set value of interme$iate fre5uency is limite$ ,y the set value of ,ase fre5uency.
PD;;= &in. -re5uency
"et >ange;.1]2;.;; 91 2nit;.;1 91 -actory "etting;.<;
(his parameter is set for the min. starting fre5uency of 3G- curve.
(he following ta,le has specific factory settings of 3G- curve/ accel.G$ecal./ time an$ carrier for
the inverter of . seriesI
22;
1<
:
;.< 2.< <;
22;
2=.<
1.<
;.< 2.< <;
:
22;
;.< 2<
<;
<<
22;
C
;.<
2<
<;
2)
1B
22;
;.< 2<
<;
11;
22;
2;
;.< 2.<
<;
)<
PD;;: &a+. 3oltage
"et >ange;.1]S 2nit;.13 -actory "etting22;G:;3
(his parameter shoul$ ,e set accor$ing to the rate$ value of the motor4s nameplate. (he factory
setting is :;3 for :;3 class motor an$ 22;3 for 22;3 class motor. (he setting range of this
parameter is restricte$ ,y the voltage rating of the inverter. In case of the motor relatively far away
from the inverter this set value can ,e increase$ properly.
PD;;C Interme$iate voltage
"et >ange;.1]<;;.;3 2nit;.13 -actory "etting1<G2=.<
(his parameter is set for an interme$iate voltage value of ar,itrary 3G- curve. If it is set
improperly/ it will cause over-current or un$er-tor5ue of the motor/ or even tripping of the inverter.
'hen the interme$iate fre5uency is increase$ the voltage will increase the output tor5ue an$ at the
same time also the output current. 'hen changing this parameter please pay attention to
monitoring the output current to avoi$ the inverter4s tripping $ue to over-current.
(he factory setting of interme$iate voltage for 22;3 class inverter is 1</ while the factory setting
of interme$iate voltage of :;3 class inverter is 2=.<.
(his set value of interme$iate voltage is limite$ ,y the set value of ma+ voltage. 'hen the
voltage is increasing to a certain value at interme$iate fre5uency the tor5ue compensation will lose
its function. 'hen a$0usting this parameter the output current of the inverter shoul$ ,e increase$
from low to high slowly accor$ing to the loa$ of machines until it meets the starting re5uirement.
Do not ,e 5uick to increase it ,y large amplitu$e. !therwise it might cause the tripping of the
inverter or the $amage of the machines.
PD;1; &in. 3oltage
"et >ange;.1]<;.;3 2nit;.13 -actory "ettingS
(his parameter is set for the min. starting voltage of 3G- curve.
(he factory setting of min. voltage for 22;3 class inverters is :/ an$ the factory setting of
min.voltage for :;3 class inverters is 1.<.
(his set value is limite$ ,y the voltage at the ma+. fre5uency.
Co$e
&o$el
PD;;C PD;1; PD;;: PD;1< PD;)1 Co$e
&o$el
PD;;C PD;1; PD;;: PD;1< PD;)1
.;;D)2B 1<.; =.< < < C .;;;)B 1= :.< ; ; )
.;D=<2B 1).; = : : C .;;=)B 1B : < < )
.;1D<2B 1).; = 1; 1; : .;;)<)B 1B : ); ); )
.;2D22B 1.; B.< 1; 1; : .;;<<)B 1< =.< )< )<
.;D=2B 1.; B.< 1< 1< = .;;=<)B 1< =.< <; <;
.;<D<2B 12.; B.; 1< 1< B .;;C;)B 1) = =< =< 2
.;=D<2B 11.; <.< 2; 2; B .;11;)B 1) = 1;; 1;; 2
.;;112B 1;.; <.; 2< 2< < .;12)B 1 B.< 1<; 1<; 2
.;;1<2B 1;.; <.; ; ; < .;1B;)B 1 B.< 1<; 1<; 2
.1:D<2B C.; ).< < < < .;1:<)B 12 B 2;; 2;; 2
.;;222B C.; ).< <; <; ) .;2;;)B 12 B 2;; 2;; 2
.;D=<)B 22 11 : : C .;22;)B 11 <.< 2<; 2<; 2
.;1D<)B 22 11 1; 1; : .;2<;)B 11 <.< 2<; 2<; 2
.;2D2)B 21 1;.< 1< 1< : .;2:;)B 11 <.< 2<; 2<; 2
.;D=)B 21 1;.< 1< 1< = .;;;)B 1; < 2<; 2<; 2
.;<D<)B 2; 1; 1< 1< B .;1<)B 1; < 2<; 2<; 2
.;=D<)B 2; 1; 2; 2; B .;)<)B 1; < 2<; 2<; 2
.;;11)B 1C C.< 2; 2; < .;=<)B 1; < 2<; 2<; 2
.;;1<)B 1C C.< 2; 2; < .;);;)B 1; < 2<; 2<; 2
.1:D<)B 1: C 2< 2< < .;)1<)B 1; < 2<; 2<; 2
.;;22)B 1: C 2< 2< <
NoteI W>amp (ime 2 U >amp (ime 1 + 2
>amp (ime U >amp (ime 2 + 2
Y>amp (ime ) U >amp (ime + 2
a&in.3oltage 3alue U Interme$iate 3oltage 3alueG2
b(he interme$iate fre5uency is 2.< for the system of <;91.
c(he interme$iate fre5uency is .; for the system of B;91.
PD;11 -re5uency *ower *imit SS
"et >ange;.;;]);;.;; 2nit;.;1 91 -actory "etting;.;;
(his is set for preventing workers from false operation to avoi$ over-heat or some other
mechanical faults/ which might ,e cause$ $ue to too low operating fre5uency.
(he setting of -re5uency *ower *imit must ,e less than the set value of -re5uency 2pper *imit.
PD;12 >eserve$
PD;1 Parameter >eset
"et >ange;;]1; 2nit1 -actory "etting;;
'hen the value for a parameter is set improper or is a,normal for some reasons this parameter can
,e set to ;: to restore it to the factory setting an$ then reset. .fter the parameters are locke$ 6in
case of PD;;;U18 the parameters can4t ,e reset. (hey can only ,e reset after unlock. -or relate$
parameters refer to PD;;;.
PD;1).ccel. (ime 1 SS
"et >ange;.1]B<;;.;" 2nit;.1" -actory "etting S
PD;1< Decel. (ime 1 SS
"et >ange;.1]B<;;.;" 2nit;.1" -actory "etting S
PD;1B .ccel. (ime 2 SS
"et >ange;.1]B<;;.;" 2nit;.1" -actory "etting S
PD1= Decel. (ime 2 SS
"et >ange;.1]B<;;.;" 2nit;.1" -actory "etting S
PD1: .ccel. (ime SS
"et >ange;.1]B<;;.;" 2nit;.1" -actory "etting S
PD;1C Decel. (ime SS
"et >ange;.1]B<;;.;" 2nit;.1" -actory "etting S
PD;2; .ccel. (ime ) SS
"et >ange;.1]B<;;.;" 2nit;.1" -actory "etting S
PD;21 Decel. (ime ) SS
"et >ange;.1]B<;;.;" 2nit;.1" -actory "etting S
>amp-up time means the time nee$e$ for the inverter to increase the fre5uency from ;91 to the
ma+imum operating fre5uency 6"ee t1 in the $iagram8. >amp-$own (ime means the time nee$e$
for the inverter to $ecrease the fre5uency from the ma+imum operating fre5uency to ;91 6"ee t2
in the $iagram8.
%ote&
!he #ersions pre#ious to ;r+.< too* =</> as the "ase of ramp time.
inverter have altogether ) >amp (imes. -or >amp (ime 2..) the user can select the $ifferent
ramp up or $own time through the e+ternal terminals or switching of ramp time accor$ing to the
actual nee$s. In the internal control multi-spee$ operation/ $ifferent ramp time can ,e selecte$
through easy P*C.
#enerally the $efault of the inverter is >amp (ime 1/ which is factory set $epen$ing on the mo$el.
>amp (ime ) is for the 0ogging ramp time. -or the factory setting of parameters refer to the ta,le
in PD;;=.
(he relate$ parametersI PD;))DPD;)C an$ P;:)DPD;:<
P;22 -actory >eserve$
PD;2 >ev >otation "elect
"et >ange;]1 2nit1 -actory "etting1
;I >ev >otation $isa,le
1I >ev >otation %na,le
(his function is suita,le for the motor/ which is not allowe$ to rotate reversely/ to prevent workers
from false operation. 'hen the reverse rotation is $isa,le$/ the motor can only rotate forwar$/ not
reverse.
PD;2) "(!P key
"et >ange;]1 2nit1 -actory "etting1
&a+ !per. -.
-
t2 t1
;"(!P invali$.
1"(!P vali$.
(his parameter set is only vali$ when PD;;1 is set to l or 2.
'hen the control mo$e is set for e+ternal terminals or communication control/ "(!P key on the
panel can ,e chosen to ,e vali$ or invali$. 'hen choosing it as vali$/ "(!P key can stop the
inverter in running. 'hen it nee$s to restart/ the former running signal must ,e release$ ,efore
restarting the inverter.
PD;2< "tarting &o$e
"et >ange;]1 2nit1 -actory "etting;
(wo starting mo$es are availa,le for the nee$s of $ifferent e5uipment.
;"tart from the starting fre5uency.
'hen PD;2C is set to ;/ i.e. DC ,raking is invali$ at start/ it starts running from the starting
fre5uency. 'hen PD;2C is set to any non-1ero value/ i.e. DC ,raking is vali$ at start/ itl first
performs a DC ,raking at start/ an$ then starts from the starting fre5uency.
-or the relate$ parameters refer to PD;</ PD;1 an$ PD;2C.
1"tart ,y fre5uency track
(his setting can ,e use$ for the restarting of large inertia loa$. 'hen restarting/ the inverter will
trace the former fre5uency from the set fre5uency $ownwar$. In case of large inertia e5uipment/
when restarting/ it can implement the running comman$ an$ track the former fre5uency right
away without waiting for the complete stop of the e5uipment to save time.
%ote& 'hen the inverter is restarte$ ,y fre5uency track/ it will start tracking the fre5uency from
its set fre5uency $ownwar$/ an$ search it at the highest spee$. 'hen restarting/ the current
,ecomes higher/ an$ over-current or stall may occur. "o attention must ,e pai$ to the a$0ustment
of current level of fre5uency track. #enerally/ PD; is a$0uste$ aroun$ 1;;. (he concrete value
can ,e set accor$ing to the characteristics of mechanical loa$.
PD;2B "topping &o$e
"et >ange;]1 2nit1 -actory "etting;
(wo stopping mo$es are availa,le for the nee$s of $ifferent e5uipment.
;Decelerating "top
'hen PD;; is set to ;/ DC ,raking is invali$. 'hen DC ,raking is invali$/ the inverter will
$ecelerate to the stopping fre5uency/ an$ then stop outputs/ an$ the motor will coast to stop. 'hen
PD;; is set to any non-1ero value/ DC ,raking is vali$/ an$ the inverter will first $ecelerate to
the stopping fre5uency/ an$ then stop ,y DC ,raking.
8<. 1-AA66
C<(<2 46
C<2(<2 H-F/5
E/2 46
DC ,raking at stop is usually use$ for high position stop or for positioning control. It must ,e
notice$ that fre5uent uses of DC ,raking will cause over-heat of the motor.
-or the relate$ parameters refer to PD;2:/ PD;1 an$ PD;;.
1Coasting "top
'hen the inverter receives a "(!P comman$/ it will imme$iately stop output an$ the motor will
coast to stop. 'hen the coasting stop mo$e is selecte$/ DC ,raking is invali$.
PD;2= "tarting -re5uency
"et >ange;.1]1;.; 91 2nit;.191 -actory "etting;.<
"tarting fre5uency is the initial fre5uency when the inverter is starte$. If the starting fre5uency is
set to ).;91/ the inverter will run ,etween ).; 91 an$ the ma+imum operating fre5uency after its
start at ).;91 . (he actual ma+imum operating fre5uency is limite$ ,y the upper limit of
fre5uency.
-or the relate$ parameters refer to PD;2</ PD;1 an$ PD;2C.
PD;2: "topping -re5uency
"et >ange;.1]1;.; 91 2nit;.191 -actory "etting;.<
'hen stopping the inverter will $ecrease its fre5uency to the stopping fre5uency an$ then stop
running or start DC ,raking to stop.
If PD;; is set to ;/ DC ,raking is invali$ at stop an$ the inverter will stop running.
If PD;; is set for vali$/ the inverter will stop ,y DC ,raking.
-or the relate$ parameters refer to PD;2B/ PD;1 an$ PD;;.
PD;2C DC Braking (ime at "tart
"et >ange;.;]2<.;" 2nit;.1" -actory "etting;.;
(his parameter is set for DC Braking at start an$ the
lasting time of DC Braking current to the motor. If it
is set to 1ero it means DC ,raking is invali$.
DC ,raking at start is normally use$ in the
application/ in which the loa$ is mova,le when the
machine is at stop/ such as win$mill. Because of the
loa$ e+isting ,efore the inverter $rives/ the motor is
often in coasting with an uncertain rotation $irection.
"o the DC ,raking can ,e e+ecute$ ,efore starting the motor to prevent the inverter from tripping.
(his setting is vali$ only when PD;2< is set to ;. -or the relate$ parameters refer to PD;2</
PD;1 an$ PD;2=.
PD;; DC Braking (ime at stop
"et >ange;.;]2<.; 2nit;.1" -actory "etting;.;
NoteI 'hen this parameter is set to any non-1ero
value it starts DC ,rake at stop an$ sen$s the DC
,raking time to the motor. DC ,raking at stop is
-
3
1 d * , 6
1 d * , 7
-
3
1 d * , 8
1 d * 9 *
often use$ for a high-level stop or positioning control. 'hen this parameter is set to 1ero it closes
DC ,raking at stop.
(his setting is vali$ when PD;2B is set to ;. -or the relate$ parameters refer to PD;2B/ PD;2: an$
PD;1.
PD;1 DC Braking 3oltage *evel
"et >ange;.;]2;.;E 2nit;.1E -actory "etting2.;
(his parameter is set for the DC ,raking voltage to the motor at start an$ stop. It can ,e a$0uste$
for $ifferent ,raking voltage. 'hen a$0usting the parameter it must ,e increase$ slowly from
lower value to high value until the sufficient ,raking tor5ue is achieve$.
(he voltage at ma+imum fre5uency is 1;;E voltage.
PD;2 -re5uency (rack (ime
"et >ange;.1]2;.;" 2nit;.1" -actory "etting2.;
(his parameter is set as fre5uency track time when the inverter is starte$ ,y fre5uency track after
an e+ternal a,normality or temporary power ,reak$own. -or starting or stopping of some large
inertia loa$/ if restarting a machine after its complete stop/ it will waste much time ,ecause of its
large inertia of loa$. But if the fre5uency track is starte$/ it is not necessary to wait for the
machine to come to a full stop for restart. (he inverter will trace the fre5uency from high to low
with the set fre5uency. .fter searching it will continue to accelerate to reach the set fre5uency.
PD; Current *evel for -re5uency (rack
"et >ange;]2;;E 2nit1E -actory "etting1<;
'hen the inverter is tracing the fre5uency this set value is taken as the level for output current.
'hen the output current is higher than this level the inverter will $ecrease the fre5uency to restore
the current ,elow the level an$ then it will e+ecute the fre5uency track again.
PD;< 2pG$own -re5uency "tep *engthI ;.;1D2.< -actory "etting;.;1
(his parameter can ,e set in com,ination with PD;=: for 2pGDown of e+ternal control an$ the
spee$ of increase an$ $ecrease.
In case of PD;=:U1 the step length of 2pGDownUthe set value of PD;</ i.e./ the range can ,e set
to ;.;1D2<9L.
In case of PD;=:U; the step length of 2pGDownUthe set value of PD;< V1;/ i.e./ the range can
,e set to ;.1D2<.;9L.
PD;)1 Carrier -re5uency NoteI ;]1< correspon$s to ;]2;7 91
"et >ange;]1< 2nit1 -actory "etting<
(he carrier fre5uency has some relation with the electromagnetic noise of the motor/ an$
meanwhile the level of the carrier fre5uency has certain relation with the heating capacity of the
inverter an$ the interference to the environment. "ee the following ta,le
Carrier
-re5uency
%lectromagnetic
Noise
9eating Capacity Interference to
the %nvironment
*ow
9igh
9igh
*ow
"mall
*arge
*ittle
#reat
Carrier -re5uency Correspon$ing (a,le
"et 3alue ; 1 2 ) < B = : C 1; 11 12 1 1) 1<
Carrier
-re5uency
791
;.= 1 1.< 2 ) < = : C 1; 11 1 1< 1= 2;
.s shown in the ta,le a,ove/ the higher the carrier is/ the lower the electromagnetic noise of the
motor will ,e/ ,ut the stronger its interference to other systems will ,e an$ the greater the heating
capacity of the inverter will have. 2n$er higher am,ient temperature an$ heavier loa$ of the motor
the carrier fre5uency shoul$ ,e $ecrease$ properly to improve the heat characteristics of the
inverter.
(he factory setting of carrier fre5uency is $epen$ing on the mo$el. -or specific $ata refer to the
ta,le in the $escription of PD;;=.
PD;)2 Togging -re5uency SS
"et >ange;.;;]);;.;; 2nit;.;1 -actory "etting<.;;
(he parameter set can reali1e the 0ogging function when the inverter is teste$. (he 0ogging
operation can ,e only achieve$ through the e+ternal terminals/ which can ,e set ,y multi-input
terminals. Togging fre5uency is limite$ ,y the fre5uency upperGlower limits. 'hile the 0ogging
function is implemente$/ other running comman$s are invali$. (he ramp-up time of 0ogging
fre5uency is set ,y >amp-up (ime ). 'hen the 0og ,utton is release$ the inverter will stop output
imme$iately. In case of 0ogging function please set the correspon$ing multi-input terminals to ;=
or ;:.
(his function is only vali$ at stop. It is invali$ at running. -or the relate$ parameters refer to
PD;))-PD;)C.
PD;) "-Curve (ime
"et >ange;]B<;;" 2nit1 -actory "etting1
(his parameter can ,e set for no impact slow start or slow stop of the inverter when starting or
stopping. 'hen starting "-curve the inverter will make accelerating or $ecelerating curve of
$ifferent spee$ rates accor$ing to >amp (ime.
'hen PD;) is set as ;/ "-curve is invali$/ i.e. it will accelerate or $ecelerate in linear. 'ithout
consi$eration of stall the actual accelG$ecal time U 6PD;;:JPD;)8G2. (he parameter is only vali$
when PD;;: is less than PD;).
PD;)) &ulti-input 1-!> function -actory "etting ;2
PD;)< &ulti-input 2>%3 function -actory "etting ;
PD;)B &ulti-input >"( function -actory "etting 1;
PD;)= &ulti-input )"P9 function -actory "etting 1=
PD;): &ulti-input <"P& function -actory "etting 1:
PD;)C &ulti-input B"P* function -actory "etting 1C
"et >ange;;]2 2nitNo
;;I Invali$. (he terminal is set for empty to prevent false actions.
;1I >2N >unning. It can ,e com,ine$ with other terminals to compose multiple
control mo$es.
;2I -!> -orwar$ >otation
;I >%3 >everse >otation
;)I "(!P "topping
;<I -!>G>%3 "witching of -!>G>%3 rotation
;BI T!# Togging
;=I Tog -!> >otation
;:I Tog >%3 >otation
;CI %mergent "top %mergent stop. It can receive e+ternal emergent stop comman$ or other
fault signals
1;I >"( >eset. (his terminal can ,e use$ for reset after a fault is remove$.
11I >eserve$
12I !ver-heat of heat sink or motorI (his contact can ,e use$ to $etect over-heat of the heat sink
or motor to protect the motor an$ inverter.
1I %+ternal Control (imer 1 "tartI 'hen the contact is close$/ the timer will start an$ ,egin to
count time. 'hen the timer reaches the set point the correspon$ing
multi-inputs will act.
1)I %+ternal Control (imer 2 "tart
1<D1B>eserve$
1=I 9igh spee$ 9igh/ mi$$le an$ low spee$ can compose three kin$s of operation mo$e
1:I &i$$le spee$ with $ifferent fre5uencies. In the three terminals the high-en$ signal has
1CI *ow spee$ priority. *ow/ &i$$le an$ 9igh "pee$ are $etermine$ respectively ,y
-re5uency 2/ / ).
2;I &ulti-spee$ 1 =-spee$ setting can ,e compose$ through &ulti-spee$ 1/ 2/ .
21I &ulti-spee$ 2
22I &ulti-spee$
2I >amp (ime 1I (his terminal can ,e use$ to select the ramp time of the inverter.
2)I >amp (ime 2I ) kin$s of ramp time are availa,le for choice.
2<I 2P -unction 'hen the switch of this terminal acts the fre5uency setting of the inverter
will ,e increase$ or $ecrease$ ,y one unit. 'hen the switch of the
terminal is hol$ the fre5uency will increase or $ecrease rapi$ly to a point
an$ then increase or $ecrease
2BI Down -unction at even spee$. 'hen the power is up again after the power ,reak$own the
change$ fre5uency will not ,e memori1e$.
2=I Counter Pulse 'hen this terminal is set for the counter it can receive the pulse signal of
d2<;9L an$ counts.
2:I Counter >eset 'hen this contact acts it will clear the present counting values $isplaye$/
restore C;; an$ restart counting.
e2CDrawing "tart 'hen this contact is triggere$ the $rawing action starts.
e1.utoP*C >eset "uspen$ (his contact can ,e use$ to achieve the function of .utoP*C
clear suspen$.
e2I PID 3ali$ 'hen this contact is close$/ PID function starts. PID -unction start is
only vali$ $uring operation.
%ote&
W !he a"o#e functions (ith the mar* of e are dedicated to the in#erter of 0 series (hich
may "e not a#aila"le for P or ? series.
X !he functions of a"o#e )@ A ++ and 5) are not a#aila"le for P series and the function of
a"o#e 5+ is not a#aila"le for ? series.
39planation&
). !hree multi-function terminals can "e used for the connection method of three-(ire
system for the reali>ation of s(itching of FO.B.3; rotation (hich is e9tensi#ely applied in
the cases of FO.B.3; s(itching of photoelectric s(itches.
W "elect -!>/ >%3 an$ >"(.
X Parameter settingI
PD;;1U1 for e+ternal control PD;))U;2 for -!> rotation
PD;)<U; for >%3 >otation PD;)BU;) for "top
Y .ction DescriptionI
'hen triggering -!>/ the inverter will rotate forwar$ 6start8R
'hen triggering >%3/ the inverter will rotate reverseR
'hen pressing "(!P/ the inverter will stop.
+. .$% DCM FB. can "e used for Start Stop and s(itching of FO.B.3;&
W "elect -!> an$ >%3
X Parameter settingI
PD;;1U1 for e+ternal control
PD;))U;1 for >2N function
PD;)<U;< for switching of -G>
'hen 72 is opene$ it rotates forwar$/ while 72 is close$ it rotates
reverse.
5. Description of .amp !ime ) and +&
18 (his function is only vali$ when PD;:; is set to ;/ 1 an$ 2. 2n$er the $istur,ance an$
internal control multi-spee$ it is invali$.
28 .ny two multi-inputs can ,e com,ine$ for ) kin$s of ramp time for selection.
8 (he relate$ multi-inputs are set for >amp (ime 1/ 2. (ake the terminals of "P9 an$ "P& as
e+ample/ when "P9 PD;)= is set to 2 an$ "P& PD;): is set to 2)/ "P9 an$ "P& are now
>amp (ime 1/ 2.
- . %
% ' V
% 4 3
D C :
4 3 . 1
% U 2
- . %
% ' V
D C :
5 +
5 ,
"P9 "P& >esult
!-- !-- >amp (ime 1
!N
!--
>amp (ime 2
!-- !N >amp (ime
!N !N >amp (ime )
8. Function description of /igh Middle and lo( speed terminals&
-
9. spee$
&.spee$
*. spee$
&ain fre5uency
(
>un comman$
*. spee$
&.spee$
*. spee$
>2N
"P* "P& "P9
>esult
!N !-- !-- !-- &ain spee$/ the fre5uency runs at
the set value of PD;;.
!N !N !-- !-- *ow spee$/ the fre5uency runs at
the set value of PD;:B.
!N !NG!-- !N !-- &i$$le spee$/ the fre5uency runs
at the set value of PD;:=.
!N !NG!-- !NG!-- !N 9igh spee$/ the fre5uency runs at
the set value of PD;::.
NoteI
1(his function is only vali$ when PD;:; is set to 1/ i.e. for )-"pee$ of e+ternal control.
2*ow/ mi$$le an$ high spee$ fre5uency are $etermine$ ,y -re5uency 2// ).
>amp time is $etermine$ ,y >amp "elect terminal.
)'hen all high/ mi$$le an$ low spee$s have signal inputs it will give priority in the se5uence
of high/ mi$$le an$ low spee$.
=. Description of $P and DOW% Function&
&a+.operating -re5uency
"et fre5uency
-.*ower *imit
2p Comman$
Down Comman$
2P D!'N >esult
!N !-- -re5uency increase
!-- !N -re5uency $ecrease
!N !N Not increase or $ecrease
NoteI
1(he function of 2P an$ D!'N is only vali$ when the operator is selecte$ for the source of
the operating fre5uency/ i.e. PD;;2U;.
2'hen the 2P terminal is close$ the fre5uency of the inverter will increase.
'hen the D!'N terminal is close$ the fre5uency of the inverter will $ecrease.
)'hen ,oth 2P an$ D!'N terminals are close$ at the same time the fre5uency will neither
increase nor $ecrease. It is regar$e$ as invali$.
<'hen the fre5uency reaches the ma+ operating fre5uency it will stop increasing.
B'hen the fre5uency reaches the min fre5uency or its lower limit/ it will stop $ecreasing.
= .fter a power ,reak$own the set value of PD;; will ,e memori1e$ instea$ of the
fre5uency.
:'hen using the function of 2P an$ D!'N/ the keys of \^ of the panel are vali$. .fter
changing the values it nee$s to press "%( 6%N(%>8 key for confirmation an$ then the
inverter can implement the action. &eanwhile the value will write to PD;;/ which will ,e
memori1e$ after a power ,reak$own.
C'hen keeping pressing 2P or D!'Nthe fre5uency will increase or $ecrease rapi$ly to a
point an$ then increase or $ecrease at even spee$.
1; (he value change$ ,y 2P or D!'N can ,e set through PD;== for confirmation of
whether it shoul$ ,e memori1e$ or not memori1e$. -or $etails refer to PD;==.
C. Function Description of Multi-speed ) + and 5&
(hey are only vali$ when PD;:; is set to 2. -or $etails refer to PD;:;.
=. Function Description of Counter
Counting 3alue reach
Counting 3alue reset
NoteI
1(he signal wi$th triggere$ shoul$ not ,e lower than 2 msect1!t2f2msec.
2'hen the counting value is reache$ the correspon$ing multi-output contact will act.
(his counter can only count again after reset.
)'hen reaching to B<<< the counter will not count again.
D. Description of 0utoPLC Clear Suspend&
-or $etails refer to 1;. %+ample .pplication of .utoP*C "uspen$ in .ppen$i+ 1 an$ the
$escription of relate$ parameters in PD11=.
ePD;<; &ulti-!utput 1D>3 function -actory "etting;1SS
ePD;<1 &ulti-!utput 22P- function -actory "etting;<
ePD;<2 &ulti-!utput -./ -B/ -C function -actory "etting;2
ePD;< &ulti-!utput )7./ 7B function -actory "etting;;
"et >ange;;]2 2nit1
;; Invali$I (he terminal is set for no function to prevent false actions.
;1 In >unI (he contact will act when the inverter has output or receives the running comman$.
;2 -ault In$icationI (he contact will act when the inverter $etects a,normal con$itions.
; Lero "pee$I (he contact will act when the output fre5uency of the inverter is less than its
starting fre5uency.
;) DC Braking in$icationI (he contact will act when the inverter is in DC ,raking.
;< "et -re5uency reachI (he contact will act when the output fre5uency of the inverter reaches
the set fre5uency.
;B 2niform -re5uency 1 >eachI (he contact will act when the output fre5uency of the inverter
reaches the $esignate$ fre5uency 6PD;B;8.
;=g2niform -re5uency 2 reachI (he contact will act when the output fre5uency of the inverter
reaches the $esignate$ fre5uency 6PD;B18.
;: In .ccelI (he contact will act when the inverter is in ramp-up.
;C In DecelI (he contact will act when the inverter is in ramp-$own.
1; Inverter !ver-loa$ .larmI (he contact will act when the inverter $etects over-loa$.
11 &otor !verloa$ .larmI (he contact will act when the inverter $etects over-loa$ of the
motor.
12 In !ver-tor5ue DetectI (he contact will act when the inverter $etects over-tor5ue.
1 *ow 3oltage .larmI (he contact will act when the inverter $etects low voltage.
t+ t,
hcn
C** C**
e1) "ingle "tep %n$I (he contact will act an$ generate one pulse when the inverter finishes a
single step in implementation of program operation.
e1< Process %n$I (he contact will act an$ generate one pulse when the inverter finishes all
the steps 6i.e. after one cycle8 in implementation of program operation.
1B"et Counter >eachI (he contact will act when the inverter implements the e+ternal counter
an$ the counting value is e5ual to the set value 6PD;B<8.
1= &i$$le Counter >eachI (he contact will act when the inverter implements the e+ternal
counter an$ the counting value is greater than or e5ual to the set value 6PD;BB8.
1:%+ternal Control (imer 1 reachI (he contact will act when the timer reaches the set value.
1C%+ternal Control (imer 2 reachI
2;)i2;m. $isconnecte$I 'hen .I input signal is opene$ the contact will act.
e2<.u+iliary Pump 1I (his contact controls the starting an$ stopping of au+iliary pumps. -or
$etails refer to !peration of &ulti-pumps.
e2B.u+iliary Pump 2
e2=Drawing reachI (he contact will act when the $rawing action is finishe$. (he contact will
automatically reset when the inverter stops.
e2:PID *ower *imit .larmI (his contact will act when the PID fee$,ack is smaller than the
lower limit 6the set value of PD1B28.
e2CPID 2pper *imit .larmI (his contact will act when the PID fee$,ack is greater than the
upper limit 6the set value of PD1B18.
;-an actI 'hen the temperature of the inverter is increase$ or it is in running/ this contact will
act.
1 %lectromagnetic >elay .ctI 'hen the contact pulls in/ the correspon$ing multi-function
terminal will act.
2 Braking >esistor .ctI 'hen the inverter is in running an$ the DC voltage reaches the
,raking voltage the contact will act.
%ote&
W !he a"o#e functions (ith the mar* of e are dedicated to the in#erter of 0 series (hich
may "e not a#aila"le for P or ? series.
X !he functions of a"o#e )8 )= and +@ are not a#aila"le for P series and the functions of
a"o#e += +C +D and +E are not a#aila"le for ? series.
PD;<) &ulti-!utput .& SS
"et >ange;]= 2nit1 -actory "etting;
-unctionsI !utput terminal of $igital fre5uency/ generating pulse or ;]1;3 analog. In
com,ination with PD;<< it can ,e connecte$ with a correspon$ing instrument with the measuring
range ,elow 1; to ,e use$ for e+ternal monitoring.
; ; 1;3 analog output/ correspon$ing to output fre5uency. ; 1;3 correspon$s to ;
&a+imum operating fre5uency
1;1;3 analog output/ correspon$ing to output current. ;1;3 correspon$s to ;two times
of the rate$ current of the inverter.
2.nalog output/ correspon$ing to DC ,us voltage. ;1;3 correspon$s to ;1;;;3.
.nalog output/ correspon$ing to .C output voltage. ;1;3 correspon$s to ;<1;3G2<<3.
NoteI (he machine type of three phase/ :;3 correspon$s to <1;3 an$ the machine type
of single phase/ 22;3 correspon$s to 2<<3
)Pulse !utput/ correspon$ing to operating fre5uencyI 1 PulseG91/<;E of capacity ratio
<Pulse !utput/ correspon$ing to operating fre5uencyI 2 Pulse G91/<;E of capacity ratio
BPulse !utput/ correspon$ing to operating fre5uencyI Pulse G91/<;E of capacity ratio
=Pulse !utput/ correspon$ing to operating fre5uencyI B Pulse G91/<;E of capacity ratio
PD;<< .& .nalog !utput #ain
"et >ange;.;]1;;.;E 2nit;.1E -actory "etting1;;.;
(his parameter can ,e use$ to a$0ust the output voltage value of &ulti-output B to a$apt to
fre5uency meters with $ifferent measuring range an$ also use$ to correct a fre5uency meter. -or
e+ample/ for an e+ternally connecte$ fre5uency meter with the measuring range of ;D<3/ a multi-
function terminal can ,e use$ to $isplay its operating fre5uency. (hen it can ,e correcte$ with this
parameter. It can ,e achieve$ ,y setting PD;<<U<; .
PD;<B "kip -re5uency 1 SS
PD;<= "kip -re5uency 2
PD;<: "kip -re5uency
"et >ange;.;;]);;.;; 91 2nit;.;191 -actory "etting;.;
PD;<C "kip -re5uency >ange SS
"et >ange;.1;]2.;; 91 2nit;.;191 -actory "etting;.<
-
PD;<:
PD;<= PD;<C
PD;<B PD;<C
(hese three fre5uency skipping points are set for avoi$ing a mechanical resonance point. In case
of PD;<CU;/ all skip fre5uencies are invali$. (he actual skip fre5uency range is two times that of
PD;<C/ as shown in the a,ove $iagram.
PD;B; 2niform -re5uency 1 SS
PD;B1 2niform -re5uency 2
"et >ange;.;;]);;.;; 91 2nit;.;1 91 -actory "etting;.;;
PD;B2 2niform -re5uency >ange SS
"et >ange;.;;]1;.;; 91 2nit;.;1 91 -actory "etting;.<;
'hen the output fre5uency is more than the uniform fre5uency the correspon$ing multi-outputs
will act. (he uniform fre5uency range acts as a hysteresis loop.
'hen the inverter is in the operation of multi-pumps/ PD;B; 62niform -re5uency 18 is use$ as
high spee$ fre5uency an$ PD;B1 is set as low spee$ operating fre5uency. (he $efinitions of the
correspon$ing multi-function contacts are change$.
2niform
-re5uency
&ulti-!utput
2niform -e5uency
2niform -re5uency
>ange
t
t
t
t
(
'hen output -. is higher
than uniform -/ the corresp.
multioutputs act.(he
uniform -. range is uae$ as
hysteresis *!!P.
PD;B (imer 1 (ime
"et >ange;1;.;; 2nitI 1 -actory "etting;.;1
PD;B) (imer 2 (ime
"et >ange;1;; 2nitI 1 -actory "etting;
(imer 1 is a timer of ;.1s D 1;.;s an$ (imer 2 is a timer of 1s D 1;;s. 'hen the timer start at
multi-inputs is close$ 6on8 the timer starts to count time. 'hen it reaches the set time the
correspon$ing multi-output contact will act. 'hen the timer start is opene$ 6off8 the timer time at
the multi-output will ,e reset.
6.t Input8 (imer start
6.t !utput8 (imer
-or e+ample/ set PD;BU<.;s. 'hen the e+ternal control terminal 6&ulti-Input8 is vali$ the output
terminal will ,e vali$ after five 6<.;8 secon$s/ the signal of which can ,e use$ to control other
correspon$ing signals.
PD;B< Counting 3alue SS
"et >ange;]B<<;; 2nit1 -actory "etting;
.n e+ternal terminal of multi-function can ,e use$ as a trigger for the counter. 'hen the counter
reaches the set value of PD;B< the correspon$ing multi-output contact will act. .fter the counter
is cleare$ an$ reset it will start counting again. . pro+imity switch or optoelectronic switch can ,e
use$ for the triggering signals.
PD;BB Interme$iate Counter
"et >ange;-B<<;; 2nit1 -actory "etting;
PD;B
!N
!N
>efer to PD;B<.
PD;=; .nalog Input
"et >ange;]1; 2nit1 -actory "etting;
;;D1;3 1;D<3 2;D2;m.
)D2;m. );-1;3j)-2;m. stacke$ <?I.
B3IJ?I.G2 =3.J?I.G) :?I.J?IBG2
C&a+ 6?I./ ?IB8 1;I&in 6?I./?IB8
(his parameter can ,e set for $ifferent analog input signals.
'hen PD;=;U)/ the output fre5uency U1G22G2ma+ J IGIma+V <;91
.mong whichI 2.nalog 3oltageR 2ma+I &a+imum .nalog 3oltageR
II .nalog CurrentR Ima+I &a+imum .nalog Current.
-or e+ample/ 'hen J1;3 an$ 2;m. are respectively entere$ for the analog input/ the output
fre5uency of the inverter is <;91.
PD;=1 .nalog -iltering Constant
"et >ange;-<; 2nit1 -actory "etting2;
(he setting of this parameter is relate$ to the analog respon$ing spee$. (he higher the value of
PD;=1 is set/ the lower the analog respon$ing spee$ will ,e.
PD;= *ower .nalog -re5uency
"et >ange;.;;]);;.;; 91 2nit;.;1 91 -actory "etting;.;;
PD;=< Bias Direction at *ower -re5uency
"et >ange;]1 2nit1 -actory "etting;
;Positive $irection
1Negative $irection
Bias $irection means the instruction of -!>G>%3 rotation comman$. Positive ,ias in$icates
forwar$ rotation while negative ,ias in$icates reverse rotation. -or $etails refer to the $iagram
in PD;=B.
PD;=2 9igher .nalog -re5uency
"et >ange;.;;]);;.;; 91 2nit;.;191 -actory "etting<;.;;
PD;=) Bias Direction at 9igher -re5uency
"et >ange;]1 2nit1 -actory "etting;
;Positive $irection
1Negative $irection
Bias $irection means the instruction of -!>G>%3 rotation comman$. Positive ,ias in$icates
forwar$ rotation while negative ,ias in$icates reverse rotation. -or $etails refer to the $iagram
in PD;=B.
PD;=B .nalog Negative Bias >everse
"et >ange;]1 2nit1 -actory "etting;
;Negative ,ias >ev is not allowa,le.
1Negative ,ias >ev is allowa,le.
(he parameter group is set for the measuring range an$ 1ero point of the e+ternal analog terminals
an$ can ,e com,ine$ for any kin$ of curve to control the operation of the motor.
>ev. .rea <; 91 -or. .rea
; <3 1;3
)m. 12m. 2;m.
-
<;
; 1;3
)m. 2;m.
-
);
;3 23 1;3
) 2;m.
1;
);
-
;3 23 1;3
)m. ).:m. 2;m.
1;
PD;== 2PGD!'N -unction
"et >ange;-1 2nit1 -actory "etting;
"etting PD;=U<; PD;=<U1 PD;=2U<;
PD;=)U; PD;=BU1
NoteI this curve can ,e easily use$ in complicate$
applications in com,ination with other curves. 'hen using it
the instruction of -!>G>%3 run from e+ternal terminals is
still vali$. 'hen switching/ the curve will turn reverse.
"etting PD;=U<; PD;=<U; PD;=2U;
PD;=)U; PD;=BU;
NoteI this curve is a kin$ of special application of reverse ramp
setting. 'hen using transmitter for the control of pressure/
temperature an$ others an$ while the control has higher
pressure an$ output signals ,ut re5uiring the correspon$ing
comman$s of stop or $eceleration on the inverter this curve can
satisfy the $eman$ properly.
"etting PD;=U1; PD;=<U1 PD;=2U);
PD;=)U; PD;=BU1
NoteI this metho$ is use$ e+tensively. (he user can use it
fle+i,ly.
"etting PD;=U1; PD;=<U1 PD;=2U);
PD;=)U; PD;=BU1
NoteR this curve is the e+tension of the a,ove curve. 23D1;3
).:m.D2;m. correspon$s to ;91D);9LR the signal of
;3D23 )D).:m. is invali$. It can ,e use$ to avoi$ noice
$istur,ance. In harsh environment it is ,etter not to use signals
,elow 13 for setting the operating fre5uency of the inverter.
;Not memori1e$ 1&emori1e$
(his parameter can ,e set for the selection of whether the values change$ ,y the 2P or D!'N
shall ,e memori1e$ or not after stop. (he change$ values whether to ,e memori1e$ or not means
when they are change$ ,y 2P or D!'N $uring operation an$ the inverter is restarte$ after stop
these change$ values shall ,e memori1e$ or not after restart. 'hen PD;== is set to ;/ the change$
value will not ,e memori1e$ an$ when it is set to 1/ the change$ values will ,e memori1e$. (he
set values of PD;; will ,e memori1e$ after restart.
-or the relate$ parameters refer to PD;))-PD;)C.
PD;=: 2PGD!'N "pee$
"et >ange;-1 2nit1 -actory "etting;
;;.;191. &inimum 2PGD!'N spee$ is ;.;191.
1;.191. &inimum 2PGD!'N spee$ is ;.191.
(hrough the changes of this set value the 2PGD!'N spee$ unit can ,e a$0uste$ to meet the nee$s
of $ifferent customers.
PD;:; P*C !peration
"et >ange;]< 2nit1 -actory "etting;
: !his function is not a#aila"le for the in#erter of P series. Default is normal operation.
;Normal operation/ i.e. the inverter is running in the normal control mo$e.
1%+ternal control )-"pee$s 6>efer to the function $escription an$ $iagram of three terminals of
high/ mi$$le an$ low spee$ in C;<;C;<<8
2%+ternal control multi-spee$s
&ulti-function (erminals >esults
&ulti-spee$ 1 &ulti-spee$ 2 &ulti-spee$
!--
!-- !-- &ain fre5uency an$ fre5uencies are $etermine$
,y PD;; or potentiometer.
!N
!--
!-- &ulti-spee$ 1 an$ fre5uency are $etermine$ ,y
PD;:B.
&ultispee$1
&ultispee$2
&ultispee$
-!>
&ain -
(
-
!-- !N !-- &ulti-spee$ 2 an$ fre5uency are $etermine$ ,y
PD;:=.
!N !N !-- &ulti-spee$ an$ fre5uency are $etermine$ ,y
PD;::.
!-- !-- !N &ulti-spee$ ) an$ fre5uency are $etermine$ ,y
PD;:C.
!N !-- !N &ulti-spee$ < an$ fre5uency are $etermine$ ,y
PD;C;.
!-- !N !N &ulti-spee$ B an$ fre5uency are $etermine$ ,y
PD;C1.
!N !N !N &ulti-spee$ = an$ fre5uency are $etermine$ ,y
PD;C2.
NoteI
W It is only vali$ to reali1e the e+ternal control :-"pee$s operation when &ulti-inputs are set for
&ulti-spee$ 1/ 2/ an$ PD;:; is set to 2.
X &ulti-spee$ 1/ 2/ can ,e use$ to make up =-"pee$s an$ :-"pee$s a$$ing the main fre5uency .
Y (he fre5uencies of "pee$ "tep 1 D "tep = are $etermine$ ,y PD;:BDPD;C2.
a %ach ramp time is $etermine$ ,y the e+ternal multi-function terminal.
b (he $irections of each program operation are $etermine$ ,y the e+ternal multi-function
terminals.
c (he main fre5uency can ,e set in two ways. !ne metho$ is to set it through PD;; an$ another
is to set it through the potentiometer. 'hen PD;;2 is set to 1 the fre5uency of &ain
-re5uency is set ,y the potentiometer. -or the relate$ parameters refer to PD;;/ PD;;2 an$
PD;:BDPD;C2.
Distur,ance 6(raverse function8
(his is a special parameter in the chemical fi,er an$ printing an$ $ying in$ustries to reali1e the
traverse function. %+cept the comman$s of stop/ e+ternal faults an$ emergency stop all other
comman$s are not accepte$ at running.
-
PD;; PD;C2
PD1;1
PD1;2
PD;C2
PD;:B
NoteI
W (he fre5uency at each inflection point is $etermine$ ,y PD;; an$ PD;:B.
X "kip -re5uency is $etermine$ ,y PD;C2.
Y >unning (ime is $etermine$ ,y (imer PD1;1 an$ PD1;2.
a (he relate$ parametersI PD;;/ PD;:BDPD1;2.
)Internal control &ulti-spee$s
PD1;1 PD1;2 PD1; PD1;) PD1;< PD1;B PD1;= PD1;: (
NoteI
W &ain spee$ an$ =-spee$s composes :-spee$s.
X (he ramp time of each spee$ step is set ,y P*C >amp (ime CD;=C. >efer to the $etail
$escriptions of CD;=C.
Y >unning (ime is set ,y (imer PD1;1DPD1;:. -or the control steps not to ,e use$ the timer can
,e set to ;.
a >unning $irection of each spee$ step is $etermine$ ,y CD;=:.
b In the internal control multi-spee$ operation the running time an$ $irection are $etermine$ ,y
the setting of internal parameters. .ny switching of e+ternal time an$ -!>G>%3 rotation is
invali$.
<Drawing
(his is a special parameter for the constant spee$ of unwin$ing an$ rewin$ing. By using this
function the linear spee$ constant in certain accuracy can ,e reali1e$.
NoteI
W (hrough triggering of the e+ternal multi-function terminal the $rawing action ,egins.
X In implementation of the $rawing action the actual running time is (UPD1;1V1;.
Y when the $rawing action is finishe$ the inverter will run at the constant see$ of PD;:= an$ the
correspon$ing multi-output contact will act at the same time. 2ntil receiving the "(!P
-
3
1D*8;
1D*86
1D**9
=<)2&T&.(<2
=<)2&T-<2(<2
comman$ the inverter will stop running an$ the multi-output contact will reset.
PD;:1 .uto P*C
"et >ange;] 2nit1 -actory "etting;
: !his function is not a#aila"le for the in#erter of P series.
;"top after the program runs one cycle.
1Cycling running.
2"top after it runs one cycle automatically"(!P for intervention.
.uto running an$ cycling "(!P for intervention
(his parameter setting is only vali$ when PD;:; is set to ). -or relevant parameters refer to
PD;;/ PD;:; an$ CD;=:DPD1;:.
39planation&
). Stop after the program runs one cycle.
'hen the comman$ of auto program operation is given/ the inverter will run with each set
value of internal parameters. It will run for one cycle an$ then stop automatically. (he inverter
will not restart an$ run until it receives another comman$ of operation.
+. Cycling run.
'hen the comman$ of operation is given/ the inverter will run in se5uence with the fre5uency
of every spee$ step an$ running time set ,y each of the internal parameters an$ will recycle.
During the cycling run/ e+cept the comman$s of stop/ e+ternal faults an$ emergency stop/ all
other comman$s will not ,e accepte$.
5. Stop after it runs one cycle automaticallyS!OP for inter#ention
NoteI
W 'hen the comman$ of auto program operation is given the inverter will run with each
parameters. But it will stop first an$ then restart at changing of each step an$ will stop
automatically after running for one cycle. (he inverter will not restart an$ run until it receives
another comman$ of operation.
X (he fre5uencies of each spee$ step are set ,y PD;; an$ PD;:BPD;C2.
Y (he running times of each spee$ step are set ,y PD1;1PD1;:.
a (he running $irection is set ,y P;:2
PD;:2 P*C >unning Direction
"et >ange;]2<< 2nit1 -actory "etting;
(his parameter is only vali$ when PD;:; is set to ). (his parameter setting $etermine the running
1 d * * 9
1 d * 8 6
1 d * 8 8
1 d * 8 7
1 d * 7 +
1 d * 7 ,
1 d * 8 ;
1 d * 8 6 1 d + * , 1 d + * 9 1 d + * < 1 d + * " 1 d + * ; 1 d + * 6 1 d + * 8
1 d * 7 *
3
-
$irection of each fre5uency of PD;:BDPD;C2 an$ PD;; in the program operation. (he setting
metho$ is as followsI
(he rotation $irection is set first in the ,inary : ,its mo$e/ an$ then converte$ to a $ecimal value
for the setting of this parameter. -or instanceI
Bit;]=
= B < ) 2 1 ;
; 1 ; ; 1 ; 1 ;
;-or. 1>ev.
&ain "pee$PD;; -or.
-re5uency 1PD;:B >ev.
-re5uency 2PD;:= -or.
-re5uency PD;:: >ev.
-re5uency )PD;:C -or.
-re5uency <PD;C; -or.
-re5uency BPD;C1 >ev.
-re5uency =PD;C2 -or.
(he parameter value ;1;;1;1; is converte$ to a $ecimal value
1V2
B
J1V2
J1V2
1
UB)J:J2U=)
(hen PD;:2U=)
PD;:) P*C >amp (ime
"et >ange;DB<<< 2nit1" -actory "etting;
(his parameter is only vali$ when PD;:; is set to ).
(his parameter is set to $etermine the ramp time values for "tep 1D) of the internal control multi-
spee$. (he setting metho$ is as followsI
W Determine each >amp (ime in the ,inary 2 ,it mo$e
Bit1
Bit;
>amp (ime
; ;
>amp (ime 1 PD;1)/ PD;1<
; 1 >amp (ime 2 PD;1B/ PD;1=
1 ; >amp (ime PD;1:/ PD;1C
1 1 >amp (ime ) PD;2;/ PD;21
X Determine the >amp time of each spee$ step in the ,inary 1B ,it mo$e
"tep : "tep = "tep B "tep < "tep ) "tep "tep 2 "tep 1
t: t= tB t< t) t t2 t1
; ; ; ; ; ; ; ; ; 1 1 ; ; ; 1 1
t1 "elect >amp (ime )
t2 "elect >amp (ime 1
t "elect >amp (ime (he setting valueI
t) "elect >amp (ime 2 1V2
;
J1V2
1
J1V2
<
J1V2
B
UCC
t< "elect >amp (ime 1 "o PD;:) is set to CC
tB "elect >amp (ime 1 .ttach2
;
U1 2
1
U2 2
2
U) 2
U:
t= "elect >amp (ime 1 2
)
U1B 2
<
U2 2
B
UB) 2
=
U12:
t: "elect >amp (ime 1
PD;:B -re5uency 2 -actory "etting 1<SS
PD;:= -re5uency -actory "etting 2;
PD;:: -re5uency ) -actory "etting 2<
PD;:C -re5uency < -actory "etting ;
PD;C; -re5uency B -actory "etting <
PD;C1 -re5uency = -actory "etting );
PD;C2 -re5uency : -actory "etting ;.<
"et >ange;.;;]);;.;; 91 2nit;.;1 91
(his parameter is set in com,ination of the multi-inputls to select )-spee$s of e+ternal control/
multi-spee$s of e+ternal control or multi-spee$s of internal control. -or the relevant parameters
refer to the $escription of PD;:; an$ PD1;1DPD1;:.
PD1;1 (imer 1 -actory "etting 1;.;SS
PD1;2 (imer 2 -actory "etting 1;.;
PD1; (imer -actory "etting ;.;
PD1;) (imer ) -actory "etting ;.;
PD1;< (imer < -actory "etting ;.;
PD1;B (imer B -actory "etting ;.;
PD1;= (imer = -actory "etting ;.;
PD1;: (imer : -actory "etting ;.;
"et >ange;.;]B<;;.;" 2nit;.1"
(his parameter is set for the internal control multi-spee$s an$ the running time of $rawing
function. -or the relevant parameter refer to PD;:; an$ PD;:BDPD1;2.
PD11= .utoP*C &emory -unction
"et >ange;]1 -actory "etting;
;Not memori1e$
1&emori1e$
(his parameter is set to $etermine whether the inverter is to reali1e the suspen$ing function in
.utoP*C mo$e. In case of PD11=U1 it can memori1e the status in which the inverter is running
an$ will memori1e it at stop or fail. It will continue to run when returning to normal. In case of
PD11=U; it will not memori1e. -or specific applications refer to %+ample .pplication 1; in
.ppen$i+ 1.
PD11: !ver-voltage "tall Prevention
"et >ange;]1 2nit1 -actory "etting1
;!ver-voltage stall prevention invali$
1!ver-voltage stall prevention vali$.
'hen the inverter is in $eceleration/ $ue to the effect of loa$ inertia/ the motor will pro$uce a
return energy to the inverter an$ cause the DC voltage of the inverter to increase. "o when the
function of over-voltage stall prevention is starte$/ if the DC voltage of the inverter ,ecomes too
high/ the inverter will stop $ecelerating till the voltage at DC $ecreases ,elow the set value/ then
the inverter will go on to $ecelerate an$ the ramp-$own time will ,e e+ten$e$ automatically.
PD11C "tall Prevention *evel at >amp-up
"et >ange;]2;;E 2nit1E -actory "etting1<;
'hen the inverter is in ramp-up/ $ue to overloa$ or too short ramp-up time/ the output current of
the inverter will go up 5uickly an$ e+cee$ the set stan$ar$ level. 'hen this happens/ the inverter
will stop accelerating. 'hen the current returns un$er its set value/ the inverter will go on to
accelerate.
1;;E current is the rate$ current of the motor. 'hen this parameter is set to ;/ the stall prevention
function is invali$.
PD12; "tall Prevention *evel at Constant "pee$
"et >ange;]2;;E 2nit1E -actory "etting;
'hen the inverter is running at constant spee$/ $ue to loa$ fluctuation an$ other reasons/ the
current will increase. 'hen the current e+cee$s its set stan$ar$ value/ the inverter will lower the
output fre5uency. 'hen the output current returns to its normal range/ the inverter will accelerate
again to its set fre5uency.
1;;E current is the >ate$ Current of the motor. 'hen this parameter is set to ; the stall
prevention function is invali$.
PD121 Decel. (ime for "tall Prevention at Constant "pee$ -actory "etting<.;
'hen the inverter is use$ for the loa$s of kin$s of fan an$ pump PD12; can ,e set to 12;. 'hen
the current of the inverter is greater than 12;E the output fre5uency will $ecrease an$ the current
will also $ecrease accor$ingly. .fter the current returns to normal the fre5uency will return to
normal slowly/ so as to achieve the stall prevention function. (he $ecreasing spee$ of the
fre5uency is $etermine$ ,y PD121. -or the >elate$ parameters refer to CD 122.
PD122 "tall Prevention *evel at Deceleration
"et >ange;]2;;E 2nit1 -actory "etting1<;
>efer to PD11:.
1;;E current is the rate$ current of the motor.
PD12 !ver-tor5ue Detect &o$e
"et >ange;] 2nit1 -actory "etting;
;'hen reaching the fre5uency it starts to $etect over-tor5ue an$ when over-tor5ue is $etecte$ it
continues to run.
1'hen reaching the fre5uency it starts to $etect over-tor5ue an$ when over-tor5ue is $etecte$ it
stop running.
2It $etects over-tor5ue $uring running an$ when over-tor5ue is $etecte$ it continues to run.
It $etects over-tor5ue $uring running an$ when over-tor5ue is $etecte$ it stop running.
PD12) !ver-tor5ue Detect *evel
"et >ange;]2;;E 2nit1E -actory "etting;
'hen the output current e+cee$s the over-tor5ue $etection level an$ also e+cee$s half of the set
time of over-tor5ue $etection 6factory settingI 1.;s8/ the over-tor5ue $etection will in$icate/ an$
the correspon$ing multi-function alarm contact will act. 'hen it e+cee$s the set time/ the inverter
will turn to self-protection. 'hen this parameter is set to ;/ the over-tor5ue $etection will ,e
invali$
PD12< !ver-tor5ue Detect (ime
"et >ange;.1]2;.;s 2nit;.1s -actory "etting1.;
'hen the inverter $etects that the output current has e+cee$e$ the motor current set value/ the
inverter ,egins to calculate the over-tor5ue time. 'hen the over-tor5ue time has e+cee$e$ half of
the set $etect time/ the correspon$ing multi-function output contact will act/ an$ pro$uce the over-
tor5ue alarm/ while the inverter will keep running. 'hen the over-tor5ue time has e+cee$e$ the
set $etect time 6set ,y PD12<8/ the inverter will turn to self-protection/ $isplay the fault
information an$ stop output..
-or the relate$ parameters refer to PD12).
SPD1; Num,er of .u+iliary Pump
"et >ange;]2 2nit1 -actory "etting;
: !his function is not a#aila"le for the in#erter of ? series.
(his parameter is set for the num,er of au+iliary pump. (he start or stop of the au+iliary pumps is
controlle$ ,y using the multi-output contacts an$ .u+iliary Pump 1 or .u+iliary Pump 2 is
controlle$ through the peripheral control circuit.
SPD11 Continuous >unning (ime of .u+iliary Pumps
"et >ange1]C;;;min 2nit1 -actory "ettingB;
: !his function is not a#aila"le for the in#erter of ? series.
In case of two pumps with only one pump in $uty/ in or$er to ensure each pump to work evenly/ it
will ,e switche$ to another pump when its running time reaches the set value of PD11.
SPD12 Interlocking (ime of .u+iliary Pump
"et >ange1]2<;" 2nit1 -actory "etting<"
: !his function is not a#aila"le for the in#erter of ? series.
(his parameter is set to $etermine the interlocking time of two au+iliary pumps when switching
with each other.
SPD1 9igh "pee$ >unning (ime
"et >ange1]2<;" 2nit1 -actory "ettingB;"
: !his function is not a#aila"le for the in#erter of ? series.
In the application of water supply with constant pressure/ when the master pump is running at the
fre5uency of high spee$ 6set ,y PD;B;8 $ue to larger water volume an$ the high spee$ running
time 6PD18 is reache$/ the correspon$ing multi-function contacts act an$ the au+iliary pumps
start.
SPD1) *ow "pee$ >unning (ime
"et >ange1]2<;" 2nit1 -actory "ettingB;"
: !his function is not a#aila"le for the in#erter of ? series.
In the application of water supply with constant pressure/ when the master pump is running at the
fre5uency of low spee$ 6set ,y PD;B18 $ue to smaller water volume an$ the low spee$ running
time 6PD1)8 is reache$/ the correspon$ing multi-function contacts act an$ the au+iliary pumps
stop.
PD1 an$ PD1) must ,e use$ in com,ination of PD;B;/ PD;B1 an$ multi-outputs. (heir main
function is to increase or $ecrease the num,er of au+iliary pump.
O
N
OF
F
PD13
1
PD13
2
OF
F
O
N
><k6 (<A(
1
><k6 (<A(
2
SPD1< "topping 3oltage *evel
"et >ange;]1<;E 2nit1 -actory "ettingC<E
: !his function is not a#aila"le for the in#erter of ? series.
(his parameter is set for the voltage level of the master pump entering into sleep mo$e. -or $etails
refer to the following $escription.
SPD1B *asting (ime of "topping 3oltage *evel
"et >ange1]2<;" 2nit1 -actory "etting;"
: !his function is not a#aila"le for the in#erter of ? series.
(his parameter is set for the lasting time un$er the stopping voltage level ,efore entering into
sleep mo$e. -or $etails refer to the following $escription.
SPD1= 'akeup 3oltage *evel
"et >ange1]1<;E 2nit1 -actory "etting:;E
: !his function is not a#aila"le for the in#erter of ? series.
(his parameter is set for the wakeup voltage level from sleep to wakeup.
SPD1: "leep -re5uency
"et >ange;.;;]);;.; 2nit 1 -actory "etting2;.;;
: !his function is not a#aila"le for the in#erter of ? series.
(his parameter is set for the lowest operating fre5uency entering into sleep mo$e.
SPD1C *asting (ime of "leep -re5uency
"et >ange1]2<;" 2nit1 -actory "etting2;"
: !his function is not a#aila"le for the in#erter of ? series.
(his parameter is set for the lasting time to run at sleep fre5uency when entering into sleep mo$e.
F
T
T
F
PD13
6
*asting time of
stop voltage level
PD139
*asting time of
sleep fre5uency
E2*52 2-
')//(
'ake-up
"leep fre5uency
PD138
"top voltage level
PD13
5
'ake-up level
PD13
7
(he following is the ,lock $iagram of multi pumps operationI
(urn !n
&aster Pump
>un
!perating -
-UPD;B;
(fPD1
.u+.Pu
mp >un
-fPD;B;
(fPD1
-dPD;B1
(fPD1)
.u+.Pu
mp >un
.u+.Pu
mp "top
-dPD;B1
(fPD1)
.u+ Pump
"top
P fPD1<
(fPD1C
-dPD1:
(fPD1C
%nter
"leep
P dPD1=
'akeup
No
No
Pes
Pes
No
No
(
PD11
.u+ Pump
"witch
Pes
No
Pes
Pes
Pes
l
Pes
Pes
Pes
Pes
Pes
Pes
Pes
Pes
s
No
No
No
No
NoteI
( >un (ime
- !perating -re5uency
PD1)1 >ate$ &otor 3oltage 2nit;.13 -actory "ettingS
It is set accor$ing to the rate$ voltage value of the nameplate of the motor. -or the inverters of
2;3 class the factory setting is 22;/ while for the inverters of );; 3 class the factory setting is
:;.
PD1)2 >ate$ &otor Current 2nit;.1. -actory "ettingS
It is set accor$ing to the rate$ value of the nameplate of the motor. (his parameter can ,e use$ to
restrict the output current of the inverter to prevent over-current an$ protect the motor. If the
current of the motor has e+cee$e$ this value the inverter of .C motor will turn to self-protection.
PD1) &otor Pole Num,er
"et >ange;2]1; 2nit1 -actory "etting;)
(his parameter is set for the num,er of the motor4s pole accor$ing to the nameplate of the motor.
PD1)) >ate$ &otor >evolution
"et >ange;]CCCC 2nit1rGmin -actory "etting1));
(his is set accor$ing to the actual revolution of the motor. (he $isplaye$ value is the same as this
set value. It can ,e use$ as a monitoring parameter/ which is convenient to the user. (his set value
correspon$s to the revolution at <;91.
PD1)< .uto (or5ue Compensation
"et >ange;.1]1;.; E 2nit;.1E -actory "etting2.;E
(his parameter can ,e set for the auto output
of e+tra voltage when the inverter is running
to achieve higher tor5ue/ which can
compensate for the un$er-tor5ue at lower
fre5uency. (he tor5ue compensation shoul$
not ,e too ,ig an$ it shoul$ ,e set slowly
from low to high accor$ing to the actual
situation.
Insufficient compensation will result in the un$er-tor5ue of the motor at lower fre5uency. .n$
over compensation will lea$ to too ,igger tor5ue/ which will pro$uce a shock to the machine an$
even result in a trip of the inverter un$er serious situation.
PD1)B &otor No-loa$ Current
"et >ange;]CC 2nit1 -actory "etting);
(he setting of motor no-loa$ current will affect the value of slip compensation. (he current is
1;;E of the rate$ current of the motor.
PD1)= &otor "lip Compensation
"et >ange;.;]1;.; 2nit;.1 -actory "etting;.;
1;;E
3
-
(orgue Compens.
'hen the inverter $rives the motor the slip ,ecomes ,igger $ue to the increase of loa$. (his
parameter can ,e set for slip compensation to $ecrease the slip an$ make the running spee$ of the
motor closer to the synchronous revolution.
PD1<; .uto 3oltage >egulation
"et >ange;]1 2nit1 -actory "etting1
;Invali$
13ali$
'hen the input power is not sta,le an$ if the voltage is too high the operation of the motor with
the power e+cee$ing the rate$ voltage will cause increase of the temperature of the motor/ $amage
of its insulation an$ unsta,le output tor5ue. (his auto voltage regulation can automatically
sta,ili1e the output voltage within the rate$ voltage range of the motor un$er the con$ition of
unsta,le output power supply
'hen this function is set to invali$ the output voltage will fluctuate.
PD1<1 .uto %nergy "aving
"et >ange;]1;E 2nit 1E -actory "etting ;
'hen it is set to 1ero this function is invali$. 'hen .uto energy saving function is starte$ the
inverter will run at the full voltage $uring ramp-up or -$own. During the operation at constant
spee$ the inverter can automatically calculate the optimum voltage value accor$ing to the power
of loa$ an$ supply power to the loa$ to achieve the goal of energy saving.
1;;E
=;E
.uto energy saving can re$uce the normal output voltage ,y ma+ ;E. -or the loa$ with fre5uent
changes or closing to full loa$/ this function is not suita,le.
PD1<2 -ault >estart (ime -actory "etting1.; s
'hen the inverter is set for fault restart an$ if it has a fault trip with the time e+cee$ing the set
value of PD1<2 the inverter will restart. 'hen using this function pay more attention to the safety.
PD1< >estart after Instantaneous "top
"et >ange;]1 2nit1 -actory "etting;
;Invali$/ i.e. the inverter will not restart after an instantaneous power ,reak$own.
!utput 3oltage
-
1"tart ,y fre5uency track. >efer to PD;2.
PD1<) .llowa,le Power-Break$own (ime
"et >ange;.1]<.;" 2nit;.1" -actory "etting;.<
(his parameter is set for the ma+imum allowa,le power failure time. If e+cee$ing the set time the
inverter will continue to stop output after power on. (o restart the inverter it nee$s to follow the
general starting proce$ures.
PD1<< Num,er of .,normal >estart
"et >ange;;]1; 2nit1 -actory "etting;;
.fter the a,normal con$itions 6such as over-current an$ over-voltage8 happens the inverter will
automatically reset an$ restart. If the starting mo$e is set to normal mo$e it will start accor$ing to
the normal proce$ures. If it is set to start ,y fre5uency track it will start in the fre5uency track
mo$e. .fter starting it will restore the set num,er again if there is no more a,normality happene$
within B; secon$s. If there is still any error an$ it reaches the set num,er the inverter will stop
output. It can only ,e starte$ after reset. 'hen PD1<< is set to 1ero the inverter will not carry out
the functions of automatic reset an$ restart.
SPD1<B Proportional Constant 6P8 SS
"et >ange;.;D1;;;.;E 2nit;.1E -actory "etting1;;E
: !his function is not a#aila"le for the in#erter of ? series.
(his proportional constant is set for the error value gain. In case of IU;/ DU;/ it is only for
proportional control.
SPD1<= Integral (ime 6I8 SS
"et >ange;.1DB;;.;s 2nit;.1s -actory "etting<.;s
: !his function is not a#aila"le for the in#erter of ? series.
(he integral time 6I8 is set for the respon$ing spee$ for PID. (he larger the I value is set the
slower the respon$ing spee$ will ,e. (o the contrary/ if the respon$ing spee$ is 5uick ,ut the
integral time value is set too small/ it will cause oscillation.
SPD1<: Differential (ime 6D8 SS
"et >ange;.;1D1;.;;s 2nit;.;1s -actory "etting;
: !his function is not a#aila"le for the in#erter of ? series.
(his $ifferential time 6D8 is set for the $epression operation of PID. (he larger the D value is/ the
more o,vious the $epression operation will ,e. 'hen D is set to 1ero/ this function is invali$.
SPD1<C (arget 3alue SS
"et >ange;D1;;.;E 2nit1E -actory "ettingS
: !his function is not a#aila"le for the in#erter of ? series.
(his target value can ,e set through e+ternal voltage signal or the $igital operator.1;;E target
value is correspon$ing to the analog fre5uency at J1;3.
PID close$-loop control is usually use$ in the process control with physical 5uantity not changing
fast/ such as the controls of pressure an$ temperature/ etc. (he fee$,ack signal is usually taken
from temperature transmitter/ or pressure transmitter/ etc. 2n$er PID control/ the fee$,ack signal
input path is the analog current signal of )-2;m..
PID close$-loop control is vali$ when &ulti-input PID is starte$.
PID Control Block DiagramI
#eneral operating metho$s of PID controlI
1Choose the correct transmitter 6with the output specification of stan$ar$ current signal )-
2;m.8.
2"et the right target value.
If the output $oes not have oscillation/ increase the proportional constant 6P8.
)If the output $oes not have oscillation/ $ecrease the integral time 6(i8.
<If the output $o not have oscillation/ increase the $ifferential time 6($8.
BConcrete applications can ,e referre$ to the e+ample application $escriptions in .ppen$i+
1.
!utput
(arget value
.fter regulation
Before regulation
(ime
1. "uppress the !ver !utput
aDecrease the $ifferential time 6D value8
,Increase the integral time 6I value8
2. "uppress the oscillation
aDecrease the $ifferential time 6D value8 or set it to 1ero.
,Decrease Proportional Constant 6P value8
SPD1B; PID (arget 3alue SS
"et >ange;]1 2nit -actory "etting;
: !his function is not a#aila"le for the in#erter of ? series.
(he target value can ,e set through the selection of the panel or e+ternal analog. (he e+ternal
analog is ;D1;3 signal or given ,y the potentiometer.
'hen PD1B;U;/ the target value of PID is the value set ,y PD1<C.
'hen PD1B;U1/the target value of PID is the value of the e+ternal analog ;-1;3 6correspon$ing
to ;-1;;E8/ the setting of PD1<C is invali$.
SPD1B1 PID 2pper *imit SS
"et >ange;]1;;E 2nit -actory "etting1;;E
: !his function is not a#aila"le for the in#erter of ? series.
'hen PID fee$,ack value is more than the set value of PD1B1 the correspon$ing multi-output
will act an$ the inverter will not stop.
SPD1B2 PID *ower *imit SS
"et >ange;]1;;E 2nit -actory "etting;E
: !his function is not a#aila"le for the in#erter of ? series.
'hen PID fee$,ack value is less than the set value of PD1B2 the correspon$ing multi-output will
!utput
(arget value
(ime
.fter regulation
Before regulation
act an$ the inverter will not stop.
PD1B Communication .$$resses
"et >ange;;]2<; 2nit -actory "etting;;
'hen the inverter is set for >"-):< Communication interface control/ each of the inverters will ,e
set for its in$ivi$ual i$entification num,er through PD1B.
;;No communication function.
;1D2<;.$$ress for the inverters
PD1B) Communication Bau$ >ate
"et >ange 2nit -actory "etting1
;):;; ,Gs 1CB;; ,Gs 21C2;; ,Gs ):;; ,Gs
PD1B< Communication Data ðo$
"et >ange 2nit -actory "etting;
;:N1 -or ."CII 1:%1 -or ."CII 2:!1 -or ."CII
:N1 -or >(2 ):%1 -or >(2 <:!1 -or >(2
MOD4$S Communication Protocol
'hen using the >"):< communication interface/ each of the inverters must ,e set for its own
a$$ress so that the computer can use this in$ivi$ual a$$ress to carry out the control.
1(he communication protocol has two kin$s of control mo$e
>(2 6>emote (erminal 2nit8 mo$e
."CII.merican "tan$ar$ Co$e for information interchangemo$e
Information of co$esI
>(2 mo$eI %ach of :-,it $ata is compose$ of two )-,it 6he+a$ecimal8/ for e+ampleI B)9
."CII mo$eI %ach of :-,it $ata is compose$ of two ."C,yte/ for e+ampleI
!ne 1-,it $ata B)9 6he+a$ecimal8 is compose$ of ."C,ytemB)n/ inclu$e$mBn6B98
an$ m)n6)98.
Byte ; 1 2 ) < B =
."CII
co$e
;9 19 29 9 )9 <9 B9 =9
Byte : C . B C D % -
."CII :9 C9 )19 )29 )9 ))9 )<9 )B9
Co$e
2Communication Data ðo$
:N1 -or ."CII PD1B<U;
"tart ,it ; 1 2 ) < B = "top ,it
:%1 -or ."CII PD1B<U1
"tart ,it ; 1 2 ) < B = %ven parity "top ,it
:!1 -or ."CII PD1B<U2
"tart ,it ; 1 2 ) < B = !$$ parity "top ,it
:N1 -or >(2 P D1B<U
"tart ,it ; 1 2 ) < B = "top ,it
:%1 -or >(2 C D1B2U)
"tart ,it ; 1 2 ) < B = %ven parity "top ,it
:!1 -or >(2 P D1B<U<
"tart ,it ; 1 2 ) < B = !$$ parity "top ,it
Communication Document -ormats
.1 ."CII &o$e
Communication Document -orms
"(?
m
.9
.DD> -2NC *%N D.(.
n-
1
ggg
C>C %ND
C>;D9
:-Data ,its Bit string
1;- ,its Character frame
:-Data ,its Bit string
11- ,its Character frame
:-Data ,its Bit string
1;- ,its Character frame
:-Data ,its Bit string
11- ,its Character frame
:-Data ,its Bit string
11- ,its Character frame
:-Data ,its Bit string
11-,its Character frame
D.(.; *-;.9
"(?"tarting unitm .9
.DD> communication a$$ress/:-,it $ata is compose$ of
two ."C ,yte.
;;Broa$cast mo$e is &!DB2"
;1D2<;.$$ress of the correspon$ing inverters.
-2NC-unction co$e :-,it $ata is compose$ of two ."C ,yte.
;1-2NC >%.D/ >ea$ the $ata of function co$e
;2-2NC '>I(/ write the $ata of function co$e
;'rite control $ata
;)>ea$ control status $ata
;<'rite inverter fre5uency $ata
;B>eserve$
;=>eserve$
;:*oop test
a>ea$ function co$e $ata
-ormatI
.DD> ;1 *%N -2NC Data
.DD>U; means no answer
.DD>p; means a reply from inverter of this a$$ress
'hen inverter reply normal/ the format as follows
.DD> ;1 *%N -2NC Data
If D.(. is one wor$/ the *%NU/ If D.(. is one ,yte/ the *%NU2 .
'hen inverter has no this function co$e or reply no effect/ the format as follows
.DD> :19 ;1 -2NC
,'rite function co$e $ata
-ormat
.DD> ;2 *%N -2NC Data
.DD>U; for ,roa$cast/ it write to all inverter/ ,ut no reply.
.DD>p;/ set $ata an$ reply from inverter of this a$$ress.
'hen the setting is incorrect or the inverter $oes not have this function/ the format returne$ is as
follows
.DD> :19 ;1 -2NC
cControl comman$s
-ormat
.DD> ; *%N CN(>
.DD>U; for ,roa$cast/ it write to all inverter/ ,ut no reply
.DD>p;/ reply an$ return.
CN(>
= B < ) 2 1 ;
0ogr 0ogf 0og rGf stop rev for run
'hen the setting is correct it will return to present control status.
-ormat.DD> ; *%N CN"(
CN"(
= B < ) 2 1 ;
(rack start Braking rGf 0ogging running rGf 0og run
'hen the check is not correct/
.DD> :9 ;1 CN"(
$>ea$ status value
-ormat
.DD> ;) ;1 C-#
.DD>U;/ no reply
.DD>p;/ reply.
C-#U;D=/ reply single $ata
;"et - 1!ut - 2!ut . >o((
)DC3 <.C3 BCont =(mp
-or e+ampleI rea$ agree$ fre5uency
"en$;1 ;) ; ;; C>C
>eturn;1 ;) ; 1 :: C>C
In which/ 1 :: are $ata
1 for high or$er/ while :: for low or$er.
*%N $ata length/ It means the length of D6n-18hD;/ *ength setI when one wor$/
*%NUwhen one ,yte or 1,yte/ *%NU2g
D.(.WData charactersX $ata content. 2n ."CII compose n ,ytes/ it have fifty ."C at
most.
*>Clongitu$inal re$un$ancy check
."CII mo$eI #et *>C metho$s is that a$$ .DD> to the last $ata/ if the result is more than
2<B/then the result su,tract 2<B until the result is less then 2<B 6if the result is 12:9/ take 2:98/
then 1;;9 su,tract the result get *>C.
-or e+ampleI write ;.;;91 to inverter of ;1write to PD;;
"(? .DD> -2NC *%N D.(. *>C %ND
YIZ Y;Z Y1Z Y;Z Y2Z Y;Z YZ Y;Z Y;Z Y;Z YBZ YBZ Y:Z YZ Y=Z YC>Z Y*-Z
.9 ;9 19 ;9 29 ;9 9 ;9 ;9 ;9 )29 )29 :9 9 =9 ;D9 ;.9
Calculate *>CI ;19J;29J;9J;;9J;B9JB:9UCC9
CC9 su,tracte$ from 1;;9I =9
"o the sent $ata is following.9 ;9 19 ;9 29 ;9 9 ;9 ;9 ;9
)29 )29 :9 9 =9 ;D9 ;.9
.2 >(2 &o$e
[uiet .DD> -2NC *%N D
n-1
DD6;8 C>C [uiet
<;ms <;ms
[uietI the time of no $ata is more than <; ms
.DD>Communication a$$ress/ :-,it $ata
-2NC-unction co$e/ :-,it $ata/ refer to .1-
*%NData length/ the length of D
n-1
DD;
D.(.$ata content/ nS:-,it
*>C*ongitu$inal >e$un$ancy Check
>(2 mo$eI get C>Ccyclical >e$un$ancy Check.
(he C>C calculation metho$ is followingI
make a 1B-,it register an$ set value ;----96call C>C register8
$one first ,yte of $ata %+clusive !> with low ,yte of 1B-,it C>C register an$ save the result
to C>C register
$one 1 ,it right shift with C>C register an$ fill 1ero to left ,it/ then check low ,it of C>C
register.
if the low ,it is 1ero/ then $o repeat setp/ else C>C register $o %+clusive !> with ;.;;19.
$one repeat step an$ )/until C>C register $one right shift : times/ then the ,yte is fully
$one.
$one repeat step 2 to < for the ne+t ,yte of $ata/ until process completely all $ata. (he last $ata
of C>C register is C>C value. 'hen sen$ C>C value in comman$ $ata/ low ,ytes must change
the se5uence with high ,ytes/ i.e. low ,ytes will ,e sent first.
%+ample 1I 'rite ;.;;91 to inverter of ;1
Comman$ $ata
.DD> -2NC *%N D.(. C>C
;19 ;29 ;9 ;;9 ;B9 B:9 =-9 ;C9
"ent $ata;19 ;29 ;9 ;;9 ;B9 B:9 =-9 ;C9
%+ample 2I
(he following is that get C>C value with C language. (he function has two parametersI
2nsigne$ char $ata the point of $ata ,uffer
2nsigne$ char length num,er of $ata ,uffer
(his function will sen$ ,ack the C>C value with unsigne$ integer format.
2nsigne$ int crc\chk 6unsigne$ char $ata/ unsigne$ char length8
]
int 0R
unsigne$ int reg\crcU;+ffffR
while 6length--8]
reg\crc^US$ataUJJR
for60U;R0W:R0JJU]
if6reg\crc@;V;18]GS*"B6,;8U1SG
reg\crcU6reg\crcXX18^;+a;;1R
_else]
reg\crcUreg\crcXX1R
_
_
_
return reg\crcR
_
PD1=; Display Items
"et >ange ;]< 2nit1 -actory "etting;
(his parameter is only vali$ when Bit 2 is set to 1 in PD1=1. -or the $etails refer to PD1=1.
;Inverter (emperature
1Counter 3alue
2PID (arget 3alue
PID -ee$,ack 3alue
)Present running time of power up 62nitI 9our8
<(otal running time of power up 62nitI 9our8
PD1=1 Display Items !pen
"et >ange;]= 2nit1 -actory "etting;
(his parameter is set for selection of $isplaying of DC voltage/ .C voltage an$ other items so that
the customer can monitor an$ view them in se5uence through the switch key.
It can ,e is set first in the ,inary ,its mo$e/ an$ then converte$ to a $ecimal value.
Bit2 Bit1 Bit; ;Invali$ 13ali$
DC 3oltage
.C 3oltage
"elect to $isplay items of PD1=;.
In the contents $isplaye$ the factory setting is to show output fre5uency/ set fre5uency/ output
current an$ output revolution through the switch key. If it is necessary to view an$ monitor other
items they can ,e set through PD1=; an$ PD1=1.
PD1=2 -ault Clear SS
"et >ange;;]1; 2nit1 -actory "etting;;
;1 is for fault clear. !thers have no function.
PD1=) >ate$ Current of Inverter 2nit1. -actory "ettingS
It is $epen$ing on the mo$el an$ can4t ,e change$.
PD1=< Inverter &o$el
"et >ange;]1 2nit1 -actory "etting;
;Constant tor5ue 1-or kin$s of fan. It can ,e o,serve$/ ,ut not change$.
PD1=B Inverter -re5uency "tan$ar$ 2nit1 -actory "ettingS
;<;91 1B;91 It is factory setting. It can ,e o,serve$/ ,ut not set.
PD1== -ault >ecor$ 1 -actory "etting
PD1=: -ault >ecor$ 2 -actory "etting
PD1=C -ault >ecor$ -actory "etting
PD1:; -ault >ecor$ ) -actory "etting
'hen it has no fault recor$ it shows ]]. .fter access to this parameter the fault $isplay can ,e
+
checke$.
PD1:1 "oftware 3ersion -actory "ettingS
It can ,e o,serve$/ ,ut not set.
PD1:2 &anufacture $ate -actory "ettingS
" < 9 , +
q
r
s
PD1: "erial No. -actory "ettingS
It is factory setting. It can ,e o,serve$/ ,ut not set.
NoteI
S means the sai$ parameter has a variety of set values or shoul$ ,e set specifically accor$ing to
concrete con$itions.
SS means the sai$ parameter can ,e set $uring the operation.
It is factory setting. It can ,e o,serve$/ ,ut not set.
'eek
&onth
Pear
Potrebbero piacerti anche
- VFDManualDocumento61 pagineVFDManualSix_PacmanNessuna valutazione finora
- The IEE Wiring Regulations Explained and IllustratedDa EverandThe IEE Wiring Regulations Explained and IllustratedValutazione: 4 su 5 stelle4/5 (14)
- Hy Series InverterDocumento60 pagineHy Series Invertersea13Nessuna valutazione finora
- VFD Manual ChinoDocumento60 pagineVFD Manual ChinovaronibericoNessuna valutazione finora
- VFD-convertidor Chino PDFDocumento69 pagineVFD-convertidor Chino PDFvaronibericoNessuna valutazione finora
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDa EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNessuna valutazione finora
- VFD Manual PDFDocumento60 pagineVFD Manual PDFray1coNessuna valutazione finora
- Mitsubishi A800 Plus Installation GuideDocumento66 pagineMitsubishi A800 Plus Installation GuidejgpazdNessuna valutazione finora
- Inverter/Charger User Manual: UP3000-HM5042 UP5000-HM8042Documento72 pagineInverter/Charger User Manual: UP3000-HM5042 UP5000-HM8042Nyoman SuryasaNessuna valutazione finora
- EPever IPower Plus IP3000 Manual em InglêsDocumento44 pagineEPever IPower Plus IP3000 Manual em InglêsFernanda BettinNessuna valutazione finora
- Anexo 2 - Manual Inversor CarregadorDocumento80 pagineAnexo 2 - Manual Inversor CarregadorAlessandro KawanoNessuna valutazione finora
- UPower Hi Manual en V2.1Documento60 pagineUPower Hi Manual en V2.1Thành Đạt Trần LêNessuna valutazione finora
- NPower Manual EN V2.3Documento52 pagineNPower Manual EN V2.3youcef88Nessuna valutazione finora
- Mitsubishi Freqrol FR A024 Manual PDFDocumento167 pagineMitsubishi Freqrol FR A024 Manual PDFndmvillocillo89% (9)
- FR-E840-0170 BLOW InverterDocumento78 pagineFR-E840-0170 BLOW InverterAbdul HameedNessuna valutazione finora
- Sealey Inverter PI1000Documento3 pagineSealey Inverter PI1000William KellyNessuna valutazione finora
- UPower Hi Manual EN V2.4Documento60 pagineUPower Hi Manual EN V2.4mauricio.areveyNessuna valutazione finora
- Inverter 1 KW ManualDocumento44 pagineInverter 1 KW ManualLeonardoNessuna valutazione finora
- VFD Manual Huanyang DriveDocumento60 pagineVFD Manual Huanyang Drivemostroya100% (1)
- IV5 ManualDocumento247 pagineIV5 ManualRobert AguilarNessuna valutazione finora
- UPower Hi Manual EN V2.2Documento60 pagineUPower Hi Manual EN V2.2merahNessuna valutazione finora
- Emerson Converter Manual PDFDocumento196 pagineEmerson Converter Manual PDFHaris KhalidNessuna valutazione finora
- E2 ManualDocumento63 pagineE2 Manualel.ambiguo0% (1)
- Manual Instalare FR 840 ConvertizorDocumento64 pagineManual Instalare FR 840 ConvertizorJoe JoeNessuna valutazione finora
- Yasnac J300 Connecting Manual (Type B)Documento186 pagineYasnac J300 Connecting Manual (Type B)sunhuynh100% (1)
- HC1 A Manual ENDocumento90 pagineHC1 A Manual ENCristianFeriasBecerra40% (5)
- Mitsubishi D700 Installation GuideDocumento28 pagineMitsubishi D700 Installation Guideawong_911374Nessuna valutazione finora
- B501 Series User Manual: Sensorless Current Vector Frequency InverterDocumento136 pagineB501 Series User Manual: Sensorless Current Vector Frequency InverterkalepohNessuna valutazione finora
- AD300 Series User Manual-EnDocumento115 pagineAD300 Series User Manual-Encarlos100% (1)
- S900 Inverter User Manualv1.5 PDFDocumento86 pagineS900 Inverter User Manualv1.5 PDFOmar ShadyNessuna valutazione finora
- AD300变频器英文说明书(V2 0)Documento161 pagineAD300变频器英文说明书(V2 0)Firman SyahNessuna valutazione finora
- Safety Instructions: Warning CautionDocumento66 pagineSafety Instructions: Warning Cautionbd entertainmentNessuna valutazione finora
- Warning Danger: Safety InstructionsDocumento142 pagineWarning Danger: Safety InstructionsMario Alberto0% (1)
- SV-Is5 User Manual - 100224Documento205 pagineSV-Is5 User Manual - 100224Kỹ Sư Tđh100% (1)
- MT.02058.001 - en V2Documento32 pagineMT.02058.001 - en V2PAOLO GIANNELLINessuna valutazione finora
- Aims300v DC - 41201Documento24 pagineAims300v DC - 41201Anonymous atBeojaNessuna valutazione finora
- SV-iE5 User Manual (0705) PDFDocumento126 pagineSV-iE5 User Manual (0705) PDFRicardo Morales50% (2)
- Titan P Series User ManualDocumento197 pagineTitan P Series User ManualJose NoelNessuna valutazione finora
- Yas j3000Documento186 pagineYas j3000gangan555Nessuna valutazione finora
- E2 SeriesDocumento121 pagineE2 SeriesMikko ItäluomaNessuna valutazione finora
- Ic5 Manual EngDocumento140 pagineIc5 Manual EngCARLOSWAR101Nessuna valutazione finora
- 3phase VFD DriveDocumento47 pagine3phase VFD Drivedanvh50Nessuna valutazione finora
- Swinv2000 ManualDocumento6 pagineSwinv2000 ManualventerhermanjNessuna valutazione finora
- S1100 Series General Purpose Inverter: User ManualDocumento65 pagineS1100 Series General Purpose Inverter: User Manualyohannes tsegaye100% (1)
- Inversor EPEVER - IPower-Plus-Manual-EN-V3.3Documento52 pagineInversor EPEVER - IPower-Plus-Manual-EN-V3.3Weslei SantosNessuna valutazione finora
- E2 ManualEnglishV11Documento64 pagineE2 ManualEnglishV11IñigoOrtizNessuna valutazione finora
- FR-S 520 S EC/ECR, FR-S 540 EC/ECR: Frequency Inverter Instruction Manual (Basic)Documento66 pagineFR-S 520 S EC/ECR, FR-S 540 EC/ECR: Frequency Inverter Instruction Manual (Basic)marianoNessuna valutazione finora
- Is7 Eng 101201Documento305 pagineIs7 Eng 101201محمدحمادNessuna valutazione finora
- Voltasol InfiniSolar 2KW3KW Manual 48V 20150310Documento52 pagineVoltasol InfiniSolar 2KW3KW Manual 48V 20150310SEMONNessuna valutazione finora
- 901-0602 Onan 12 & 24 Volt Battery Charger 305-0812 305-0813 Installation & Service Manual (05-2001)Documento16 pagine901-0602 Onan 12 & 24 Volt Battery Charger 305-0812 305-0813 Installation & Service Manual (05-2001)เกียรติศักดิ์ ภูมิลา100% (2)
- VAT 20 Inversor GEDocumento46 pagineVAT 20 Inversor GERodrigoNessuna valutazione finora
- InfiniSolar TX-PA ManualDocumento55 pagineInfiniSolar TX-PA ManualRaza Anwer100% (1)
- Ls Ic5 ManualDocumento137 pagineLs Ic5 Manuallangtu_spk0% (1)
- EI 500 User ManualDocumento107 pagineEI 500 User ManualRASHID AnsariNessuna valutazione finora
- Manuale Iv5 (Inglese) PDFDocumento223 pagineManuale Iv5 (Inglese) PDFRobert Mohovic100% (1)
- HLP-P Series Operating ManualDocumento116 pagineHLP-P Series Operating Manualkavikjain123Nessuna valutazione finora
- Ls Inverter Ip5a ManualDocumento144 pagineLs Inverter Ip5a Manual786shmNessuna valutazione finora
- Oracle Documentation - Do-060 User Reference ManualDocumento11 pagineOracle Documentation - Do-060 User Reference ManualAnbu ManoNessuna valutazione finora
- BlackBerry V FacebookDocumento117 pagineBlackBerry V FacebookRussell Brandom75% (4)
- Hardware Notes - Creo 1.0 Parametric, Direct and Simulate: Table of ContentDocumento7 pagineHardware Notes - Creo 1.0 Parametric, Direct and Simulate: Table of ContentMohankumarNessuna valutazione finora
- GDS-1000B Quick Start Guide ADocumento2 pagineGDS-1000B Quick Start Guide Aketab_doostNessuna valutazione finora
- Crocus SHDSL g703Documento302 pagineCrocus SHDSL g703Ahmed Sakr100% (1)
- Release Note Ver 1.0Documento2 pagineRelease Note Ver 1.0Nkenchor OsemekeNessuna valutazione finora
- Principles of Data VisualizationDocumento2 paginePrinciples of Data VisualizationAAKASHNessuna valutazione finora
- Step-by-Step Guide To Enrolling Online: Ready To Enrol? Enrolment StepsDocumento11 pagineStep-by-Step Guide To Enrolling Online: Ready To Enrol? Enrolment Stepscrescentarian77Nessuna valutazione finora
- 1st Quarter ICT ReviewerDocumento5 pagine1st Quarter ICT ReviewerazrielgenecruzNessuna valutazione finora
- EM 2 Unit 2Documento16 pagineEM 2 Unit 2KeerthiSaha100% (1)
- Software Engineering: UNIT-3Documento41 pagineSoftware Engineering: UNIT-3Jayavarapu Karthik JNessuna valutazione finora
- 16oct Csit 315Documento21 pagine16oct Csit 315Majety S LskshmiNessuna valutazione finora
- Metrology and Measurements - Lecture Notes, Study Material and Important Questions, AnswersDocumento7 pagineMetrology and Measurements - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNessuna valutazione finora
- Network Forensic Log AnalysisDocumento5 pagineNetwork Forensic Log AnalysisEditor IJRITCCNessuna valutazione finora
- Serena Hotel ProjectDocumento30 pagineSerena Hotel ProjectNauman Rashid100% (1)
- DSE8610 MKII Installation Instructions PDFDocumento2 pagineDSE8610 MKII Installation Instructions PDFManuel Ortiz Galán100% (1)
- PC57 12 91 PDFDocumento2 paginePC57 12 91 PDFAlexander Cortez EspinozaNessuna valutazione finora
- Coherent LMC 2016-2017 CatalogDocumento140 pagineCoherent LMC 2016-2017 CatalogPopescu Viorel-MihaiNessuna valutazione finora
- Proposed Research Titles: ObjectivesDocumento4 pagineProposed Research Titles: ObjectivesApril Danica BiernezaNessuna valutazione finora
- Unit 3 Inside The SystemDocumento2 pagineUnit 3 Inside The SystemMartín CrespoNessuna valutazione finora
- Le Veritable Dragon RougeDocumento142 pagineLe Veritable Dragon RougeDavid GourmetNessuna valutazione finora
- DS ERHARD ERK Titling Disc Check Valve ENDocumento12 pagineDS ERHARD ERK Titling Disc Check Valve ENkad-7Nessuna valutazione finora
- OM - PPT 02 KanbanDocumento28 pagineOM - PPT 02 KanbanSourav SinhaNessuna valutazione finora
- Er Shutdown For 15.12.21 Rev1Documento8 pagineEr Shutdown For 15.12.21 Rev1Gitesh PatelNessuna valutazione finora
- New Text DocumentDocumento2 pagineNew Text DocumentpshtiwanNessuna valutazione finora
- Guidance On Complying With Section IX, QG-106: Updated To Address Revisions in The 2021 EditionDocumento5 pagineGuidance On Complying With Section IX, QG-106: Updated To Address Revisions in The 2021 EditionSurat ButtarasriNessuna valutazione finora
- EmpowermentDocumento2 pagineEmpowermentAndrew C. BrazaNessuna valutazione finora
- Technology Vision 2021Documento30 pagineTechnology Vision 2021ootchayNessuna valutazione finora
- ANT-A08260PD00v06-4130 DatasheetDocumento6 pagineANT-A08260PD00v06-4130 DatasheetInter MilanNessuna valutazione finora
- 5.1 Software Test AutomationDocumento20 pagine5.1 Software Test Automationudhayan udhaiNessuna valutazione finora