Potrebbero piacerti anche
- Radio (Am-Fm)Documento35 pagineRadio (Am-Fm)Adilson GomesNessuna valutazione finora
- Sistemas de Telefonia Celular No Brasil ResumoDocumento8 pagineSistemas de Telefonia Celular No Brasil ResumoAdilson GomesNessuna valutazione finora
- O MOSFET Como Um InterruptorDocumento9 pagineO MOSFET Como Um InterruptorAdilson GomesNessuna valutazione finora
- Sensores de LuzDocumento13 pagineSensores de LuzAdilson GomesNessuna valutazione finora
- Transistor Darlington ParDocumento9 pagineTransistor Darlington ParAdilson Gomes100% (2)
- Relatório LDRDocumento12 pagineRelatório LDRAlessandro Rodrigues ViottoNessuna valutazione finora
- Saber Narrativo - Proposta para Uma Leitura de Italo CalvinoDocumento133 pagineSaber Narrativo - Proposta para Uma Leitura de Italo CalvinoMaria Elisa Rodrigues MoreiraNessuna valutazione finora
- Exerccios de Ácidos e BasesDocumento2 pagineExerccios de Ácidos e BasesElson Juliani100% (1)
- ROTEIRO P SIMULAÇÃO Principio de Fermat RefraçãoDocumento3 pagineROTEIRO P SIMULAÇÃO Principio de Fermat RefraçãoBest ScenesNessuna valutazione finora
- As Transmissões Sementes Estelares - Ken CareyDocumento80 pagineAs Transmissões Sementes Estelares - Ken CareyginamacielNessuna valutazione finora
- Ficha Tecnica - MasterPolyheed - 22 - V1 - 180321Documento2 pagineFicha Tecnica - MasterPolyheed - 22 - V1 - 180321caiam RibeiroNessuna valutazione finora
- Laser - Fundamentos e Indicações em DermatologiaDocumento23 pagineLaser - Fundamentos e Indicações em DermatologiaPaulo CassimiroNessuna valutazione finora
- Voltametria e Amperometria - Karl FisherDocumento105 pagineVoltametria e Amperometria - Karl FisherSandra Meinen da Cruz100% (1)
- Conjuntos 3Documento12 pagineConjuntos 3Evanildo GonçalvesNessuna valutazione finora
- 6 - Cálculo Das Ações HorizontaisDocumento7 pagine6 - Cálculo Das Ações HorizontaisGuilherme GodoyNessuna valutazione finora
- ED Dispersão CorreçãoDocumento1 paginaED Dispersão CorreçãoClayton LuizNessuna valutazione finora
- Aula 6 Gibbs Helmholtz 29 09 2021Documento27 pagineAula 6 Gibbs Helmholtz 29 09 2021Leandro FortunatoNessuna valutazione finora
- Behaviorismo Radical e Pratica ClinicaDocumento15 pagineBehaviorismo Radical e Pratica Clinicaroberto pintoNessuna valutazione finora
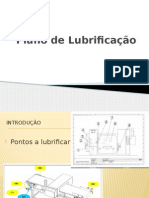
- Plano de LubrificacaoDocumento25 paginePlano de LubrificacaoAmanda VianaNessuna valutazione finora
- Processos Extrativos Destilacao Arraste Vapor Extracao Eugenol LQODocumento10 pagineProcessos Extrativos Destilacao Arraste Vapor Extracao Eugenol LQOLetícia BorgesNessuna valutazione finora
- Exercícios MatemáticaDocumento147 pagineExercícios MatemáticaWagner Miranda100% (1)
- A+Construção+e+Operação+de+Máquinas+Radiônicas UnlockedDocumento101 pagineA+Construção+e+Operação+de+Máquinas+Radiônicas UnlockedJavier V100% (3)
- Módulo 11 - Iluminação-2Documento45 pagineMódulo 11 - Iluminação-2Elisa GarciaNessuna valutazione finora
- Aula TSB Impressao LuanneDocumento202 pagineAula TSB Impressao LuanneedirozemberghNessuna valutazione finora
- Nps Fone 01 06 XXXDocumento2 pagineNps Fone 01 06 XXXprimosergioNessuna valutazione finora
- Validação de Água AlineDocumento13 pagineValidação de Água AlineAline FerreiraNessuna valutazione finora
- Diagnóstico Segurança e SaúdeDocumento14 pagineDiagnóstico Segurança e SaúdeWilliam BrumNessuna valutazione finora
- Exercícios de Fixação: PRODUÇÃO (Economia) - Com GabaritoDocumento6 pagineExercícios de Fixação: PRODUÇÃO (Economia) - Com GabaritovmtmasterNessuna valutazione finora
- Calibração de TanquesDocumento234 pagineCalibração de Tanquesspeedeas67% (3)
- Pmea PDFDocumento12 paginePmea PDFAnonymous nPK85ZFzNessuna valutazione finora
- NBR 05112 Porta Lampadas de Rosca Edison PDFDocumento6 pagineNBR 05112 Porta Lampadas de Rosca Edison PDFGuilherme PatriotaNessuna valutazione finora
- Planilha Lajes TreliçadasDocumento9 paginePlanilha Lajes TreliçadasOsmar de AndradeNessuna valutazione finora
- SZ Portugues PDFDocumento9 pagineSZ Portugues PDFraquel_tamaioNessuna valutazione finora
- III Relatório de Química - Pratica MetaisDocumento15 pagineIII Relatório de Química - Pratica Metaisjubol100% (1)
- manualPDL5500 PDFDocumento8 paginemanualPDL5500 PDFjoao cagandoNessuna valutazione finora