Potrebbero piacerti anche
- Artificial Intelligence AI Report MunDocumento11 pagineArtificial Intelligence AI Report MunMuneer VatakaraNessuna valutazione finora
- VEX LiftsDocumento24 pagineVEX LiftsivstinivsNessuna valutazione finora
- Iso 3834 3 2021Documento10 pagineIso 3834 3 2021Dulce Tlanilli Dionisio AmadoNessuna valutazione finora
- Image Encryption and Decryption Using Triple Des Algorithm: Submitted byDocumento34 pagineImage Encryption and Decryption Using Triple Des Algorithm: Submitted bySreejith SNessuna valutazione finora
- Parallel Port Interfacing Using Assembly LanguageDocumento21 pagineParallel Port Interfacing Using Assembly Languageamon_abilar100% (1)
- Artificial Intelligence Unit 1 - 5Documento325 pagineArtificial Intelligence Unit 1 - 5Amani yar KhanNessuna valutazione finora
- Ai - MaterialDocumento58 pagineAi - MaterialchanduNessuna valutazione finora
- Artificial Intelligence and Neural NetworkDocumento20 pagineArtificial Intelligence and Neural Networkuditsingh665Nessuna valutazione finora
- I. What Is Artificial Intelligence?Documento3 pagineI. What Is Artificial Intelligence?AliNessuna valutazione finora
- Ai-Unit-I NotesDocumento74 pagineAi-Unit-I NotesCharan 'sNessuna valutazione finora
- Module 9Documento14 pagineModule 9bscomputersciencelsstiNessuna valutazione finora
- Chapter One: Intelligence Is of Important To UsDocumento17 pagineChapter One: Intelligence Is of Important To Usoromafi tubeNessuna valutazione finora
- Artificial Intelligence and Machine Learning (21CS54) Module - 1Documento13 pagineArtificial Intelligence and Machine Learning (21CS54) Module - 1Balaji YalburgiNessuna valutazione finora
- AIDocumento9 pagineAIMohammad Gulam AhamadNessuna valutazione finora
- 1 - C InroductionDocumento19 pagine1 - C InroductionPratik RajNessuna valutazione finora
- 0 AIcompleteMergedDocumento366 pagine0 AIcompleteMergedPratik RajNessuna valutazione finora
- Artificial Intelligence Notes Unit 1Documento40 pagineArtificial Intelligence Notes Unit 1Hema Vathy100% (1)
- IS NotesDocumento78 pagineIS Notesapi-3834932Nessuna valutazione finora
- Unit 1 Introduction To AI - 12.08.2023Documento51 pagineUnit 1 Introduction To AI - 12.08.2023Narendra PallavanNessuna valutazione finora
- UNIT 7 - The Social Implications of Artificial Intelligence and Expert SystemsDocumento11 pagineUNIT 7 - The Social Implications of Artificial Intelligence and Expert Systemsvicrattlehead2013Nessuna valutazione finora
- Cs8691-Ai - Unit 1 NotesDocumento27 pagineCs8691-Ai - Unit 1 Notes47 Rakshanaa.VNessuna valutazione finora
- Introduction To AI What Is Artificial Intelligence?Documento24 pagineIntroduction To AI What Is Artificial Intelligence?kiransangeetaNessuna valutazione finora
- AIDocumento30 pagineAIyasomcaNessuna valutazione finora
- Artificial IntelligenceDocumento64 pagineArtificial IntelligenceChetan AnandNessuna valutazione finora
- UNIT-1 Introduction To AI - FinalDocumento95 pagineUNIT-1 Introduction To AI - Finalkarthik reddyNessuna valutazione finora
- Ai - Unit IDocumento38 pagineAi - Unit ILolakapuri Ananth VardhanNessuna valutazione finora
- Notes Artificial Intelligence Unit 1Documento57 pagineNotes Artificial Intelligence Unit 1Aafreen AlamNessuna valutazione finora
- Artificial IntelligenceDocumento5 pagineArtificial Intelligencetrustme2204Nessuna valutazione finora
- Artificial IntelligenceDocumento11 pagineArtificial Intelligencemanuhya24_14178586Nessuna valutazione finora
- Introduction To Knowledge-Base Intelligent SystemsDocumento44 pagineIntroduction To Knowledge-Base Intelligent SystemsRayse ChaiNessuna valutazione finora
- Artificial IntelligenceDocumento33 pagineArtificial IntelligencelordsenoxNessuna valutazione finora
- Complete AiDocumento85 pagineComplete Aiolapade paulNessuna valutazione finora
- Term Paper .1Documento27 pagineTerm Paper .1Wren D'silvaNessuna valutazione finora
- The Advancement of Turing Test: A. PhilosophyDocumento4 pagineThe Advancement of Turing Test: A. PhilosophyFiyory TassewNessuna valutazione finora
- Artificial IntelligenceDocumento12 pagineArtificial IntelligenceRose Maria Dominic75% (4)
- Principles of AI: Lecturer: Gunjan MansinghDocumento17 paginePrinciples of AI: Lecturer: Gunjan MansinghDayton Good Kush AllenNessuna valutazione finora
- Artificial IntelligenceDocumento14 pagineArtificial IntelligenceKripa KrishnaNessuna valutazione finora
- Introduction To AIDocumento12 pagineIntroduction To AIAnup MaharjanNessuna valutazione finora
- Ai Unit 1,2 NotesDocumento45 pagineAi Unit 1,2 NotesamrutharampuramNessuna valutazione finora
- Artificial IntelligenceDocumento21 pagineArtificial IntelligenceSaichandra SrivatsavNessuna valutazione finora
- Unit 1 (Introduction To AI)Documento36 pagineUnit 1 (Introduction To AI)Meghana MuppallaNessuna valutazione finora
- Unit 1 (Introduction To AI)Documento36 pagineUnit 1 (Introduction To AI)Meghana MuppallaNessuna valutazione finora
- Module 3-Artificial Intelligence (AI) What Is Artificial Intelligence?Documento18 pagineModule 3-Artificial Intelligence (AI) What Is Artificial Intelligence?CherianXavierNessuna valutazione finora
- Project Report ON "Artificial Intelligence"Documento24 pagineProject Report ON "Artificial Intelligence"arush9211100% (1)
- AI 2021 SlidesDocumento39 pagineAI 2021 SlidesCharis OneyemiNessuna valutazione finora
- Artificial IntelligenceDocumento8 pagineArtificial IntelligenceSateesh Basapur0% (1)
- Artifical Intelligence Unit 1Documento21 pagineArtifical Intelligence Unit 1KP EDITZNessuna valutazione finora
- Aiml 1-5 NotesDocumento182 pagineAiml 1-5 NotesamplifydocumentNessuna valutazione finora
- Artificial Intelligence: Mohammed Alhanjouri IUGDocumento53 pagineArtificial Intelligence: Mohammed Alhanjouri IUGEman IbrahimNessuna valutazione finora
- Lecture 01 (Introduction)Documento39 pagineLecture 01 (Introduction)Bilal AbbasiNessuna valutazione finora
- Intro To AIDocumento63 pagineIntro To AIAyush GuptaNessuna valutazione finora
- 1 e Om ZXQCFHZ PIBk PM3 SF ZP7 B OL3 HQF QAdDocumento44 pagine1 e Om ZXQCFHZ PIBk PM3 SF ZP7 B OL3 HQF QAdOsewa Oreoluwa obededomNessuna valutazione finora
- AI Unit PDFDocumento97 pagineAI Unit PDFMayur DhakeNessuna valutazione finora
- Ai Course FileDocumento67 pagineAi Course Filesanthi sNessuna valutazione finora
- Cs2351 Ai NotesDocumento91 pagineCs2351 Ai NotesAkash Verma100% (1)
- Artificial IntelligenceDocumento23 pagineArtificial Intelligenceteddy demissieNessuna valutazione finora
- Artificial IntelligenceDocumento17 pagineArtificial IntelligenceAppleNessuna valutazione finora
- AL3391 Notes Unit IDocumento52 pagineAL3391 Notes Unit Iquiny christabel100% (1)
- Ai AND CHINADocumento18 pagineAi AND CHINAJulian Brix De VeraNessuna valutazione finora
- Symbolic Artificial Intelligence: Fundamentals and ApplicationsDa EverandSymbolic Artificial Intelligence: Fundamentals and ApplicationsNessuna valutazione finora
- Artificial Intelligence Winter: Fundamentals and ApplicationsDa EverandArtificial Intelligence Winter: Fundamentals and ApplicationsNessuna valutazione finora
- Physical Symbol System: Fundamentals and ApplicationsDa EverandPhysical Symbol System: Fundamentals and ApplicationsNessuna valutazione finora
- A New Policy of Critical and Constructive Engagement: CubaDocumento25 pagineA New Policy of Critical and Constructive Engagement: CubaivstinivsNessuna valutazione finora
- The Utilitarian Imperative - Autonomy Reciprocity and EvolutionDocumento61 pagineThe Utilitarian Imperative - Autonomy Reciprocity and EvolutionivstinivsNessuna valutazione finora
- The Onion 1998: Nobody Believes This ShitDocumento2 pagineThe Onion 1998: Nobody Believes This ShitivstinivsNessuna valutazione finora
- Bab 2 - Coal Handling PlantDocumento10 pagineBab 2 - Coal Handling PlantmasgrahaNessuna valutazione finora
- The COBIT 5 Processes Are Split Into Governance and ManagementDocumento8 pagineThe COBIT 5 Processes Are Split Into Governance and ManagementdevmasterNessuna valutazione finora
- Citrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsDocumento3 pagineCitrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsAnonymous rNmxZViYaNessuna valutazione finora
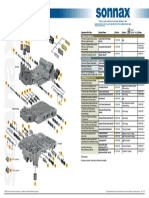
- Aisin AW TF-81SC: Click On Part Numbers For Product Details or VisitDocumento1 paginaAisin AW TF-81SC: Click On Part Numbers For Product Details or Visittejonmx100% (1)
- The Pitch Canvas: Simple Statement of What Change You and Your Product Are Making in The World. Pain (+ Gain)Documento1 paginaThe Pitch Canvas: Simple Statement of What Change You and Your Product Are Making in The World. Pain (+ Gain)B PositiveNessuna valutazione finora
- Firmware Upgrade Guide enDocumento4 pagineFirmware Upgrade Guide enPau CorellaNessuna valutazione finora
- UNIX PermissionsDocumento4 pagineUNIX PermissionsIngiaNessuna valutazione finora
- 3.6.3 Function Block Diagram: 3 Operation TheoryDocumento2 pagine3.6.3 Function Block Diagram: 3 Operation TheoryAC DCNessuna valutazione finora
- Scenario - Based - Que - DbmsDocumento8 pagineScenario - Based - Que - DbmsPrachi P100% (1)
- HIO KeypadDocumento4 pagineHIO KeypadMaitry ShahNessuna valutazione finora
- Product Thinking vs. Project ThinkingDocumento8 pagineProduct Thinking vs. Project ThinkingUjwal TickooNessuna valutazione finora
- 5-HK5 Miniature Solenoid ValvesDocumento6 pagine5-HK5 Miniature Solenoid ValvessakscribNessuna valutazione finora
- Carpool App Case StudyDocumento2 pagineCarpool App Case StudyLuh CheeseNessuna valutazione finora
- Denon Avr-1613 Owners ManualDocumento131 pagineDenon Avr-1613 Owners ManuallerondotNessuna valutazione finora
- IT Module 4Documento2 pagineIT Module 4Crizele Joy LagudaNessuna valutazione finora
- Andrew Bonar LeviticusDocumento517 pagineAndrew Bonar LeviticusexpsalmodyNessuna valutazione finora
- Cummins Gas EngineDocumento2 pagineCummins Gas EngineСемен ГассеевNessuna valutazione finora
- Familiarization of Measuring Instruments and Tools HandoutDocumento9 pagineFamiliarization of Measuring Instruments and Tools HandoutVineeth WilsonNessuna valutazione finora
- Laptop Sebagai Teman Siswa: Laptop As Students' FriendDocumento1 paginaLaptop Sebagai Teman Siswa: Laptop As Students' Friendtigor lianda manik07Nessuna valutazione finora
- Energy Efficient BuildingDocumento11 pagineEnergy Efficient BuildingSantosh Basnet100% (2)
- Recent Trends in AutomobilesDocumento23 pagineRecent Trends in AutomobilesVivekanand ChockalingamNessuna valutazione finora
- Coe1.Anncoe Forms Inst Hall Ticket Report.1-59.11Documento1 paginaCoe1.Anncoe Forms Inst Hall Ticket Report.1-59.11prasanthprpNessuna valutazione finora
- CV - Qian YihaoDocumento19 pagineCV - Qian Yihaodestri_742053763Nessuna valutazione finora
- DWM1001 DatasheetDocumento30 pagineDWM1001 DatasheetJan KubalaNessuna valutazione finora
- AP-Lab Manual - UpdatedDocumento110 pagineAP-Lab Manual - Updatedbaidnirvana8Nessuna valutazione finora
- Scope of Work of Non IBR Boiler InspectionDocumento1 paginaScope of Work of Non IBR Boiler InspectionShailendra BoroleNessuna valutazione finora
- Esp TELE-satellite 1107Documento212 pagineEsp TELE-satellite 1107Alexander WieseNessuna valutazione finora