Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- 1 s2.0 S0304885323004249 MainDocumento16 pagine1 s2.0 S0304885323004249 MainSourav Sarkar MechanicalNessuna valutazione finora
- Airline Business Process OptimizationDocumento26 pagineAirline Business Process OptimizationPeggytaBruinhart100% (1)
- A.Townsend - Genetic Algorithms - A TutorialDocumento52 pagineA.Townsend - Genetic Algorithms - A TutorialLpeo23Nessuna valutazione finora
- Paper Cognitive Network GssoDocumento12 paginePaper Cognitive Network GssoLeonardo LavanderosNessuna valutazione finora
- Reduce Noise Improve Sound Quality With Actran Acoustic Radiation SimulationDocumento22 pagineReduce Noise Improve Sound Quality With Actran Acoustic Radiation SimulationAhmedBrahamNessuna valutazione finora
- Prescriptive Analytics FundamentalsDocumento3 paginePrescriptive Analytics FundamentalsRona LabogNessuna valutazione finora
- SCN Social Factors Avocado CaseDocumento32 pagineSCN Social Factors Avocado CaseOswald CastroNessuna valutazione finora
- Facility PlanningDocumento15 pagineFacility Planningsspecial4meNessuna valutazione finora
- You Shouldn't Trust Me: Learning Models Which Conceal Unfairness From Multiple Explanation MethodsDocumento8 pagineYou Shouldn't Trust Me: Learning Models Which Conceal Unfairness From Multiple Explanation MethodsFahim Hasan AlifNessuna valutazione finora
- Distributed Hybrid Renewable Polygeneration For Indian Villages: Optimization StudiesDocumento7 pagineDistributed Hybrid Renewable Polygeneration For Indian Villages: Optimization StudiesSagar KumarNessuna valutazione finora
- Quantitative TechniqueDocumento3.715 pagineQuantitative Techniquess tNessuna valutazione finora
- Hero Vired Business Analytics and Data Science BrochureDocumento23 pagineHero Vired Business Analytics and Data Science BrochureprathapNessuna valutazione finora
- Operations Research Model and SolutionsDocumento49 pagineOperations Research Model and SolutionsAnnisa RahmawatyNessuna valutazione finora
- Gurobi - Optimization For Dummies PDFDocumento27 pagineGurobi - Optimization For Dummies PDFudNessuna valutazione finora
- Problem Set 6Documento5 pagineProblem Set 6clouds lauNessuna valutazione finora
- DAA Unit3 Notes and QBankDocumento37 pagineDAA Unit3 Notes and QBankyamuna100% (1)
- Probabilistic Machine Learning: An IntroductionDocumento826 pagineProbabilistic Machine Learning: An Introductionalasaarela100% (2)
- Mba in Biotechnology: Sem I Subject Name Subject Code Page NoDocumento46 pagineMba in Biotechnology: Sem I Subject Name Subject Code Page Nojoshikailash21Nessuna valutazione finora
- Chemical Engineering Science: Zhiqiang Geng, Zun Wang, Qunxiong Zhu, Yongming HanDocumento13 pagineChemical Engineering Science: Zhiqiang Geng, Zun Wang, Qunxiong Zhu, Yongming HanPratikNessuna valutazione finora
- 1 s2.0 S0378779622008550 MainDocumento9 pagine1 s2.0 S0378779622008550 MainROIBER VASQUEZ TAPIANessuna valutazione finora
- JIT Inventory Management: EOQ, Reorder Points, and the Theory of ConstraintsDocumento15 pagineJIT Inventory Management: EOQ, Reorder Points, and the Theory of ConstraintsReicelle Natividad VejeranoNessuna valutazione finora
- Uri Kartoun PHD Final 2007Documento418 pagineUri Kartoun PHD Final 2007kartoun1107Nessuna valutazione finora
- Unit III Session 08Documento44 pagineUnit III Session 08K.A.S.S PereraNessuna valutazione finora
- Optimal Sizing of SSSC Controllers To Minimize Transmission Loss and A Novel Model of SSSC To Study Transient ResponseDocumento7 pagineOptimal Sizing of SSSC Controllers To Minimize Transmission Loss and A Novel Model of SSSC To Study Transient ResponseVenki PowerfulmanNessuna valutazione finora
- Drilling Fluids CatalogDocumento47 pagineDrilling Fluids CatalogChristian Vera BetetaNessuna valutazione finora
- Chapter 2: Decision Making, Systems, Modeling, and SupportDocumento75 pagineChapter 2: Decision Making, Systems, Modeling, and Supportjanagyrama1Nessuna valutazione finora
- Sustainable Maritime Inventory Routing Problem With Time Window Constraints2017Engineering Applications of Artificial IntelligenceDocumento19 pagineSustainable Maritime Inventory Routing Problem With Time Window Constraints2017Engineering Applications of Artificial Intelligencemajid yazdaniNessuna valutazione finora
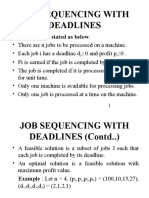
- Job Sequencing With Deadlines: The Problem Is Stated As BelowDocumento24 pagineJob Sequencing With Deadlines: The Problem Is Stated As BelowVijay TrivediNessuna valutazione finora
- Groove Valve PlateDocumento112 pagineGroove Valve PlatePHÁT NGUYỄN THẾNessuna valutazione finora
- Module 2 Decision MakingDocumento19 pagineModule 2 Decision MakingKulot BautistaNessuna valutazione finora