T
Proceedings of the World Congress on Engineering 2011 Vol III
WCE 2011, July 6 - 8, 2011, London, U.K.
Design of a Hip Joint Simulator According to
the ISO 14242
Nikolaos I. Galanis, Member, IAENG and Dimitrios E. Manolakos
AbstractWear and simulator testing are complicated tasks.
Controlled wear testing should not be routinely done to qualify
a material, but rather to elucidate wear mechanisms. It,
generally, may be described as a machine used to test a joint
replacement under conditions approximating those occurring
in the human body. Simulator tests, on the other hand, can be
used to conduct accelerated protocols that replicate/simulate
particularly extreme conditions, thereby establishing the limits
of performance for the material. The present paper is dealing
with the study of the most common simulators, and the design
of a new one that has been analysed by a CAD software to
meet the aforementioned study and the ISO 14242 Standard
recommendations.
I ndex TermsHip Joint Simulator, ISO 14242, flexion,
adduction, outwards rotation
I. INTRODUCTION
HE mammalian synovial joint is truly a remarkable
structure and mechanism. After maturation, guided both
by a genetic blueprint and by functionally driven adaptation,
its behavior exceeds that of all simple engineered bearings;
it is self-lubricating and, to a degree, self-repairing and
capable of a service life exceeding 75 years. However, when
damaged by trauma, disease or extended use, its repair and
replacement has proven to be both one of the most
challenging and rewarding of all aspects of human
medicine. For when a painful joint, especially in the lower
limb, is successfully replaced, the patient has not simply had
pain relieved but has been restored to full life, often to such
an extent that the permanent presence of an implant is
essentially forgotten [1]. During the last decades, hip joint
endoprosthetics have been ever more widely used in the
worlds orthopedic practice; more than 400,000 operations
are performed every year and more than 100 types of
endoprosthetic construction have been designed [2].
The biomaterials of hip joint prosthesis are metal or
ceramic in femoral head, and metal, ceramic or UHMWPE
in acetabular cup. Material selection and component design
are important factors in the performance and durability of
total joint replacements. Wear of total hip prosthesis is a
significant clinical problem, because the wear of the implant
products can cause adverse tissue reaction that may lead to
massive bone loss around the implant and, consequently,
loosening of the fixation. The need for systematic study of
N. I. Galanis is with the National Technical University of Athens,
Athens, Greece (corresponding author to provide phone: +302102510174;
fax: +302102580365; e-mail: ngalanis@central.ntua.gr).
D. E. Manolakos is with the National Technical University of Athens,
Athens, Greece (e-mail: manolako@central.ntua.gr).
ISBN: 978-988-19251-5-2
ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
wear is evident in order to improve the knowledge of the
tribology characteristics of a hip joint prosthesis. The study
of wear rate typical of joint pairing constitutes an important
aspect in pre-clinical validation of prosthesis. Generally,
two categories of laboratory tests are conducted: wear
screening device (quick tests) that provide information
exclusively on the intrinsic features of the materials studied,
and those conducted on joint simulators, in which real
prostheses are tested in an environment that simulates
physiological conditions. A wear-screening device basically
uses a very simple specimen configuration. This category of
tests are quick and provide information exclusively on the
intrinsic features of the materials studied, without
reproducing either the features of the shape of the implant,
or the environment with which it will have to interact.
Simulators are more complex and vary in their level of
sophistication to reproduce with major accuracy the in vivo
conditions [3].
Since 2000, the International Organization for
Standardization (ISO) developed an international procedure
in order to obtain comparable results between the
laboratories. These international recommendations
suggested the specifications and the methods to assess the
wear and as to conduct a wear test.
In this paper it will be presented the procedure of
designing such a simulator according to the strict ISO
14242, in order to adjust it in an existing automated
dynamic Instron
Press, for controlling the load exerted on
the examined implant. The design has to do with the
simulation of the human movement, because it is
complicated for femoral heads, as it has to do with the
angles of flexion and extension, adduction and abduction,
inwards and outwards rotation.
II. HIP SIMULATOR STUDY
Hip simulator studies have become an efficient tool for
basic research as well as for preclinical testing to minimize
patients risk when receiving new implant types. The history
of simulator development, mainly driven by research, has
led to the development of many diverse designs. Natural
joint kinematics are more closely simulated by three-axes
machines, performing independently controlled motion
vectors, than by forerunner single-axis machines, executing
purely flexion/extension movement. Besides the kinematics
and loading regime used, the composition of test fluid still
varies between the laboratories [4].
The objective of wear evaluation is to determine the wear
rate and its dependence on the test conditions, which include
load, speed, temperature, and the spatial configuration of the
sliding components. In order to obtain realistic results, a
wear test must be performed in a way to reproduce in vivo
WCE 2011
Proceedings of the World Congress on Engineering 2011 Vol III
WCE 2011, July 6 - 8, 2011, London, U.K.
working conditions as closely as possible. The extent to
which the physiological phenomena can be reproduced by a
given simulator design depends upon the availability of
physiological data, the skill of the designer, and the budget
for the project. The design of a hip joint simulator must
consider the problem of generating relative motion cycles
between two articulating surfaces, while applying a contact
force that varies in magnitude and direction during the walk
cycle. In addition to these mechanical features, it should
also duplicate the thermo-chemical environment provided
by physiological fluids [5].
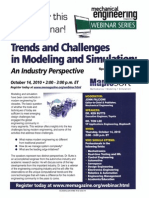
The motion of the simulators is strict defined in the
directions of all angles, like flexion and extension,
adduction and abduction, inwards and outwards rotation,
through ISO 14242. In Fig. 1, it is shown a diagram of
variation with time of angular movement to be applied to
the femoral test specimen.
Fig 1: Variation with time of angular movement to be applied to the femoral
test specimen
In the last years, a lot of simulators design, were
developed in order to achieve similarity between the
simulation and in-vivo conditions. At this point, so as to
understand them, there is a small presentation of the most
known simulation in the literature, with characteristics as
shown in Table I.
Typical devices of these hip joint simulators are shown in
Fig. 2. According to Table I, each simulator has 2 or 3 axis
of revolution with which achieves the rotation of specific
angles in a variety of degrees.
The AMTI-Boston Hip Simulator simulates hip motion
with simultaneous loading in a physiologic environment
(Fig. 2a). The simulator provides rotation about 3 axes in
the sagittal plane, abduction/adduction plane and about the
vertical (femoral) axis, and loading profiles which replicate
walking or stair climbing.
In the 12-station HUT-4 simulator (Fig. 2b), the
prosthesis is in the anatomical position and self-centring.
ISBN: 978-988-19251-5-2
ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
The electromechanical motion consists of flexion-extension
(FE) and abduction-adduction (AA) of the femoral
component. Saikko introduced a useful way to compare the
wear produced in vivo and in vitro by wear simulators, by
using a wear factor. The idea of the wear factor is that the
wear rate is proportioned with respect to load and sliding
distances [6 - 7]. Furthermore, the design of such a
simulator, performed through a comparative analysis,
consists a valuable basis for studies on the relationship
between the types of multidirectional motion and wears [8].
The Mark II Durham hip joint simulator (Fig. 2c) is a five
stations machine where the joints are mounted anatomically
and subjected to a dynamic loading cycle with independent
two-axis motion.
The Leeds PA II hip joint simulator (Fig. 2d) possesses
six stations. The load is applied in the vertical direction and
the simulator can control, independently, the Flexion-
Extension and Internal-External rotations, with simplified
cycles to generate a multidirectional motion between the
femoral head and the acetabular cup. The joint bearings are
mounted in the anatomical position with both the femoral
stem and the acetabular cup cemented into metallic holders.
The motions can be applied as smooth sinusoidal cycles
with the flexion/extension applied to the femoral
components with amplitudes of +30
o
/15
o
, and a 10
o
internal/external rotation. The internal/external rotation was
applied 90
out of phase with the flexion/extension such that
an open elliptical wear path can be generated between the
components. This has been shown to give results similar to
hip simulators with three physiological axes of motion; see
also [3] and [9].
The ProSim Limited hip joint simulator has 10 stations
(Fig. 2e). In each station, the cup is mounted in the
anatomical position above the femoral head inclined at an
angle of 35 with respect to the horizontal plane. This
position replicates the inclination of the cup in the pelvis at
45 to the vertical and the resultant load vector 10
medially. Each station has two degree of freedom and the
range of motion vary between 30 to +30. The load and
motion kinematics follows the Pauls studies [10]. To
evaluate this simulator there were a number of studies so as
to examine the role of the materials of implants [11] and the
design of their shape [12].
The MATCO hip simulator (model EW08 MMED) is
configured in two bank of eight channel each (Fig. 2f). The
cups and the heads are mounted in non-anatomical position.
This simulator involves a symmetrical shift of the cup over
a stationary head through a range of about 45 (22.5) in
both sagittal and frontal planes with no rotation in the
transverse plane. Usually the imposed load follows a Pauls
curve with a peak load of 2.1 kN.
The Shore Western Hip joint simulator is a 12 station
machine (Fig. 2g). In each station the implants are mounted
in non-anatomical position and the heads alignment is
provided by a ball bearing on the head holder. In each
station the implants were mounted in non-anatomical
position (upside down) and the cup edges were set to an
angle of about 23
related to the horizontal plane [13].
It becomes clear that the opportunities of a simulator,
gives the options of better analysis and experiments in vitro
study of new and evolutionary materials for implants [14].
WCE 2011
Proceedings of the World Congress on Engineering 2011 Vol III
WCE 2011, July 6 - 8, 2011, London, U.K.
Fig 2: Hip Joint simulators (a) AMTI, (b) HUT-4, (c) Mark II, (d) Leeds PA II, (e) ProSim Limited, (f) MATCO and (g) Shore Western [3]
ISBN: 978-988-19251-5-2
ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
WCE 2011
(2003)
AMTI
12
3
-
axis
FE(25
),AA(9
)
IN-EX(20
)
4.81.1
mg/Mc
anatomical
(2001)
Mark
II
Durham
5
2-axis
IN-EX(10
)
)
50.327.07
mm
3
/Mc
anatomical
IN-EX(10
)
0.110.04
Nevelos
(2001)
Leeds
PA
II
6
2-axis
FE(+30
/-15
)
(2000)
PROSIM
Limited
10
2-axis
BI-AX
(30
)
421
mm
3
/Mc
anatomical
McKellop
MMED
16
2-axis
FE(22.5
)
EW08
(2005)
SW
12
2-axis
BI-AX
(23
)
0.0320.028
mg/Mc
No
anatomical
(2006)
SW
12
2-axis
BI-AX
(23
)
0.17
mg/Mc
No
anatomical
Proceedings of the World Congress on Engineering 2011 Vol III
WCE 2011, July 6 - 8, 2011, London, U.K.
Table I: Main characteristics between different simulators design [3].
AUTHOR SIMULATOR STATION CLASSIFI-
CATION
MOTION
SIMULATED
WEAR RATE POSITION-
HEAD
Bragdon et. al.
Saikko (2005) HUT-4 12 2-axis FE(46
),AA(12
) 8.2 mg/Mc anatomical
Smith
mm
3
/Mc
anatomical
Barbour
(2004) AA(22.5
)
0.4
mm
3
/Mc
No
anatomical
Clarke
Affatato
FE = flexion-extension, AA = abduction-adduction, IN-EX = internal-external rotation,
BI-AX = biaxial rocking, Mc = million cycles
point at -17
, which corresponds to the 50% of the sheave
III. DESIGN OF HIP SIMULATOR
The main characteristics of the above-presented testing
machines along with the recommendations of the ISO 14242
standard have been taken into consideration for designing a
new concept of a 3-axis hip simulator, which will be
capable to combine movements/rotations in the three
important angles. The whole design was performed by using
a CAD software at the Laboratory of Manufacturing
Technology of the National Technical University of Athens.
According to the limitations, which the specific machine has
to fit in an existing automated Instron
press so as to control
the amount of load that acts on implants during the study,
the maximum height of simulator has not to exceed 1m.
Furthermore, it must be foreseen a space for the motor,
which will give rotation to the eccentric sheave of each axis,
as well as a tank, filled with a fluid representing the
environment inside the human body, where the implant will
be immersed in.
Following the limitations arisen, we conducted at the
design concept as shown in Fig. 3. The testing machine
proposed herewith is consisting of four basic sets of parts,
as listed below:
The main body of the simulator (I)
The electrical motor for rotating the eccentric sheaves
through a system of driving chain and gear chain (II)
3 eccentric sheaves (III), one for each axis of
movement, which give motion to the tank
The tank for immersing the implant, filled with a
special fluid, which simulates the physiologic
phenomena (IV)
The eccentric sheaves play the most important role in this
mechanism, since they are mainly charged to reproduce the
exact rotation of a human hip joint, under walking
conditions, according to ISO 14242 recommendations. This
complex movement is described in Fig. 1, and its values
permit the calculation of the exact radius of sheaves at each
point of their periphery.
A. Extension and Flexion Eccentric Sheave
The extension and flexion movement is restricted
between the angles of +25
and -17
. The movement starts
at an angle of 25
and is gradually lowering up to the lower
ISBN: 978-988-19251-5-2
ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
rotation. Afterwards, an upward movement follows up to the
upper point at +25
. Taking into consideration the
movement limitations, the distance of 150mm between tank
and sheave and the sheave radius of 105mm, the exact
radius at each point of the sheave periphery may be
calculated, as shown in the graph of Fig. 4
B. Abduction and Adduction Eccentric Sheave
The abduction and adduction movement takes place
between the angles of +7
and -7
. The movement starts at
an angle of 3
and gradually rotates up to the upper point of
+7
, corresponding to the 21% of sheave rotation. A
downwards movement follows up to the lower point of -7
,
corresponding to the 62% of the sheave rotation, and,
finally, an upwards movement completes the rotation at 3
.
Taking into account all movement limitations, the tank-
sheave distance of 150mm and the sheave radius of 105mm,
there was also calculated the exact sheave radius at each
point of its periphery; see Fig. 4.
C. Inwards and Outwards Rotation Eccentric Sheave
The inwards and outwards rotation movement is limited
between the angles of +2
and -10
. The movement starts at
an angle of -10
and gradually rotates up to the upper point
of +2
(at the 50% of sheave rotation), lowering again
downwards up to the lower point at -10
. Taking into
account all movement limitations, the tank-sheave distance
of 60mm and the sheave radius of 60mm, there was also
calculated the exact sheave radius at each point of its
periphery; see Fig. 4.
D. Radius
According to the graph in Fig. 4, the radius of the
eccentric sheaves at each point is related with the angle of
the movement in the specific axis and the basic radius of the
part. In comparison with the graph in Fig. 1, the shape of the
sheaves follows exactly the form of the angle of movement
in the axis. This explains the same but in other plane, slope
of the two graphs for the same rotational axis.
WCE 2011
Proceedings of the World Congress on Engineering 2011 Vol III
WCE 2011, July 6 - 8, 2011, London, U.K.
Fig. 3: Hip Joint simulator (a) the whole machine divided in (I) main body, (II) electrical motor, (III) eccentric sheaves and (IV) tank. (b) a section of the
tank, (c) extension and flexion eccentric sheave, (d) abduction and adduction eccentric sheave and (e) inwards and outwards rotation eccentric sheave.
ISBN: 978-988-19251-5-2
ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
WCE 2011
Proceedings of the World Congress on Engineering 2011 Vol III
WCE 2011, July 6 - 8, 2011, London, U.K.
Fig. 4: Radius of eccentric sheaves of hip joint simulator
IV. CONCLUSION
This paper summarizes the use of hip simulators in
research of new hip joint materials. Common known
simulators have been presented, having one or more stations
and giving the possibility to simulate the movement of a hip
in 2- or 3-axis. A comparison between these machines and
the recommendations of ISO 14242 lead to the design of a
new one station hip simulator, with 3-axis of rotation. This
movement can be achieved with the help of three individual
eccentric sheaves with a specific shape, which produce the
rotation in the prescribed angles according to the
aforementioned international standard.
REFERENCES
[1] J. Black, Bearing Surfaces 2005, 10th BIOLOX Symposium
Proceedings, pp. 3-8, 2005
[2] N. I. Galanis and D. E. Manolakos, Investigation of Cutting
Parameters in Manufacturing of Femoral heads, World Congress on
Engineering 2009, pp. 1606-1611
[3] S. Affatato, W. Leardini and M. Zavalloni, Hip Joint Simulators: State
of the Art, 11th BIOLOX Symposium Proceedings, pp. 171-180, 2006
[4] C Kaddick and M A Wimmer, Hip simulator wear testing according to
the newly introduced standard ISO 14242, Proc Instn Mech Engrs,
Vol. 215 Part H, pp. 429-442, 2001
[5] M. Viceconti, G. Cavallotti, A.O. Andrisano and A. Toni, Discussion
on the design of a hip joint simulator, Med. Eng. Phys., Vol.18 No. 3,
pp. 234-240, 1996
[6] V. Saikko, T. Ahlroos, O. Calonius, A three-axis knee wear simulator
with ball-on-flat contact, Wear, Vol. 249, pp. 310-315, 2001
[7] O. Calonius, V. Saikko, Force track analysis of contemporary hip
simulators, Journal of Biomechanics, Vol. 36, pp. 17191726, 2003
[8] O. Calonius, V. Saikko, Slide track analysis of eight contemporary hip
simulator designs, Journal of Biomechanics, Vol. 35, pp. 14391450,
2002
[9] A. L. Galvin, S. Williams, P. Hatto, J. Thompson, G. Isaac, M. Stone,
E. Ingham and J. Fisher, Comparison of wear of ultra high molecular
weight polyethylene acetabular cups against alumina ceramic and
chromium nitride coated femoral heads, Wear, Vol 259, pp. 972-976,
2005
ISBN: 978-988-19251-5-2
ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
[10] A A J Goldsmith and D Dowson, Development of a ten-station, multi-
axis hip joint simulator, Proc Instn Mech Engrs, Vol. 213 Part H, pp.
311-316, 1999
[11] D. Dowson, C. Hardaker, M. Flett and G. H. Isaac, A Hip Joint
Simulator Study of the Performance of Metal-on-Metal Joints Part I:
The Role of Materials, The Journal of Arthroplasty, Vol. 19 No. 8,
pp. 118- 123, 2004
[12] D. Dowson, C. Hardaker, M. Flett and G. H. Isaac, A Hip Joint
Simulator Study of the Performance of Metal-on-Metal Joints Part II:
Design, The Journal of Arthroplasty, Vol. 19 No. 8, pp. 124- 130,
2004
[13] S. Affatato, M. Testoni, G. L. Cacciari, A. Toni, Mixed oxides
prosthetic ceramic ball heads. Part 1: effect of the ZrO2 fraction on the
wear of ceramic on polyethylene joints, Biomaterials, Vol. 20, pp.
971-975, 1999
[14] S. Affatato, M. Spinelli, S. Squarzoni, F. Traina, A. Toni, Mixing and
matching in ceramic-on-metal hip arthroplasty: An in-vitro hip
simulator study, Journal of Biomechanics, Vol. 42, pp. 24392446,
2009
WCE 2011
Potrebbero piacerti anche
- Durham Research Online: Deposited in DRODocumento10 pagineDurham Research Online: Deposited in DROjainshani2Nessuna valutazione finora
- Design and Control of A Parallel Robot For Ankle RehabilitationDocumento14 pagineDesign and Control of A Parallel Robot For Ankle RehabilitationSushi RollNessuna valutazione finora
- Hindavi 5513013Documento12 pagineHindavi 5513013Muthuvelan MutharasuNessuna valutazione finora
- 2 Dof Ankle FootDocumento20 pagine2 Dof Ankle FootMustafa Oğuz DALNessuna valutazione finora
- A Soft Wearable Robotic Ankle-Foot-Orthosis For Post-Stroke PatientsDocumento6 pagineA Soft Wearable Robotic Ankle-Foot-Orthosis For Post-Stroke PatientsIsabella Garcia DiazNessuna valutazione finora
- SEM X Int Cong s110p01 Dynamic Measurement 3 D Stiffness Ankle Foot OrthosesDocumento10 pagineSEM X Int Cong s110p01 Dynamic Measurement 3 D Stiffness Ankle Foot OrthoseschoopoNessuna valutazione finora
- Estimation of Two Wear Factors For Total Hip ArthrDocumento8 pagineEstimation of Two Wear Factors For Total Hip ArthrMauricio MoncadaNessuna valutazione finora
- Life Sci J 2013 10 (2) :230-235) (ISSN:1097-8135)Documento6 pagineLife Sci J 2013 10 (2) :230-235) (ISSN:1097-8135)deathjester1Nessuna valutazione finora
- Robot-Assisted Ankle Rehabilitation For The Treatment of Drop Foot: A Case StudyDocumento5 pagineRobot-Assisted Ankle Rehabilitation For The Treatment of Drop Foot: A Case StudyIhsanNessuna valutazione finora
- Design and Optimization of An Index Finger Exoskeleton With Semi-Wrapped Fixtures and Series Elastic ActuatorsDocumento10 pagineDesign and Optimization of An Index Finger Exoskeleton With Semi-Wrapped Fixtures and Series Elastic ActuatorsمحمدNessuna valutazione finora
- Initial Biomechanical Analysis and Modeling of Transfemoral Amputee GaitDocumento7 pagineInitial Biomechanical Analysis and Modeling of Transfemoral Amputee GaitAshwini Kumar BaluguriNessuna valutazione finora
- 1.0) Name 2.0) Project Title 3.0) Background:::: Design and Development of A Speech-Activated Bionic JointDocumento6 pagine1.0) Name 2.0) Project Title 3.0) Background:::: Design and Development of A Speech-Activated Bionic JointAhmed AbdulwahabNessuna valutazione finora
- Design and Control of A Lower Limb Exoskeleton For Robot-Assisted Gait TrainingDocumento16 pagineDesign and Control of A Lower Limb Exoskeleton For Robot-Assisted Gait TrainingYalçın SabihaNessuna valutazione finora
- A Review Study For Measurement, Analysis and Evaluation Four Bar Polycentric KneeDocumento18 pagineA Review Study For Measurement, Analysis and Evaluation Four Bar Polycentric Kneejosephe.thrasherNessuna valutazione finora
- A Preclinical Method For Evaluating The Kinematics - 2019 - Medical EngineeringDocumento7 pagineA Preclinical Method For Evaluating The Kinematics - 2019 - Medical EngineeringEzgi PelitNessuna valutazione finora
- A New Controlling Parameter in Design of Above Knee ProsthesisDocumento8 pagineA New Controlling Parameter in Design of Above Knee ProsthesismohsinslatchNessuna valutazione finora
- A New Hand Exoskeleton Device For Rehabilitation Using A Three-Layered Sliding Spring Mechanism PDFDocumento6 pagineA New Hand Exoskeleton Device For Rehabilitation Using A Three-Layered Sliding Spring Mechanism PDFGIenlemenNessuna valutazione finora
- Two-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityDocumento15 pagineTwo-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityTYTNessuna valutazione finora
- Yang 2018 J. Phys. Conf. Ser. 1087 062004Documento7 pagineYang 2018 J. Phys. Conf. Ser. 1087 062004Jayakrishnan P SNessuna valutazione finora
- In Vivo Three-Dimensional Kinematics of The Normal Knee DuringDocumento9 pagineIn Vivo Three-Dimensional Kinematics of The Normal Knee DuringAngel LiconaNessuna valutazione finora
- Exoskeleton Design For LegDocumento8 pagineExoskeleton Design For LegGamini SureshNessuna valutazione finora
- Carney (2021)Documento12 pagineCarney (2021)Fernanda LealNessuna valutazione finora
- Modelling and Analysis of A Prosthetic Runner BladeDocumento11 pagineModelling and Analysis of A Prosthetic Runner BladeIJRASETPublicationsNessuna valutazione finora
- Micromachines 2544656 Peer Review v1Documento21 pagineMicromachines 2544656 Peer Review v1Parvin AkterNessuna valutazione finora
- Applied SciencesDocumento22 pagineApplied SciencesHamrah SiddiquiNessuna valutazione finora
- A Novel Soft Elbow ExosuitDocumento8 pagineA Novel Soft Elbow Exosuiteyao100% (1)
- 1471 2474 12 79 PDFDocumento7 pagine1471 2474 12 79 PDFElAhijadoNessuna valutazione finora
- Finite Element Analysis of Artificial Hip Joint Movement During Human ActivitiesDocumento7 pagineFinite Element Analysis of Artificial Hip Joint Movement During Human ActivitiesFrendy ImanuddinNessuna valutazione finora
- Biomechanical Stress Analysis of A Human Femur Bone Using AnsysDocumento6 pagineBiomechanical Stress Analysis of A Human Femur Bone Using AnsysLu A. FloresNessuna valutazione finora
- 1 s2.0 S1350453322000790 MainDocumento8 pagine1 s2.0 S1350453322000790 MainNANDHINIK 19BM059Nessuna valutazione finora
- Robotics: A Review On Design of Upper Limb ExoskeletonsDocumento35 pagineRobotics: A Review On Design of Upper Limb ExoskeletonsDerekNessuna valutazione finora
- Robotics: A Review On Design of Upper Limb ExoskeletonsDocumento35 pagineRobotics: A Review On Design of Upper Limb ExoskeletonsCostinel BogheanuNessuna valutazione finora
- An Actuated Finger Exoskeleton For Hand Rehabilitation Following Stroke 2007Documento6 pagineAn Actuated Finger Exoskeleton For Hand Rehabilitation Following Stroke 2007newkid2202Nessuna valutazione finora
- Design and Development of A Lightweight, High-Torque, and Cost-Effective Hip ExoskeletonDocumento6 pagineDesign and Development of A Lightweight, High-Torque, and Cost-Effective Hip ExoskeletonSultan Mahi ZubairNessuna valutazione finora
- A Human-Exoskeleton Interface Utilizing Electromyography: Christian Fleischer and G Unter HommelDocumento11 pagineA Human-Exoskeleton Interface Utilizing Electromyography: Christian Fleischer and G Unter HommelMannanHarshaNessuna valutazione finora
- Tendon Transfer Surgery: Analysis and Simulation With Opensim 3.3 SoftwareDocumento2 pagineTendon Transfer Surgery: Analysis and Simulation With Opensim 3.3 SoftwareJeffllanoNessuna valutazione finora
- Lovely Professional UniversityDocumento4 pagineLovely Professional Universityshailesh_singh_19Nessuna valutazione finora
- Design and Aplication of A 3DOF Bionic Robot ArmDocumento6 pagineDesign and Aplication of A 3DOF Bionic Robot ArmWairy Dias CardosoNessuna valutazione finora
- BIOMECHANICS - Hip ImplantsDocumento12 pagineBIOMECHANICS - Hip Implantslucas washingtonNessuna valutazione finora
- 2003 - Shahram Payandeh - Towardnewdesignsofhapticdevicesforminimallyinvasiv (Retrieved 2018-09-07)Documento7 pagine2003 - Shahram Payandeh - Towardnewdesignsofhapticdevicesforminimallyinvasiv (Retrieved 2018-09-07)AmyNessuna valutazione finora
- Biomechanical Evaluation of Exoskeleton Use On Loading of The Lumbar SpineDocumento8 pagineBiomechanical Evaluation of Exoskeleton Use On Loading of The Lumbar SpineJuan Carlos VelasquezNessuna valutazione finora
- Mechengineering201010 1370038810000bc23a8f06e PPDocumento5 pagineMechengineering201010 1370038810000bc23a8f06e PPSamuelHuatayNessuna valutazione finora
- Intelligent Knee Prostheses A Systematic Review of Control StrategiesDocumento19 pagineIntelligent Knee Prostheses A Systematic Review of Control Strategiesrkp17Nessuna valutazione finora
- Design of A 7 Degree-of-Freedom Upper-Limb Powered ExoskeletonDocumento6 pagineDesign of A 7 Degree-of-Freedom Upper-Limb Powered Exoskeletonfaizar_2Nessuna valutazione finora
- J Apsusc 2017 02 185Documento7 pagineJ Apsusc 2017 02 185pariNessuna valutazione finora
- Joe 2018 9005Documento5 pagineJoe 2018 9005yousif.midhat1403mNessuna valutazione finora
- Souit 2016Documento6 pagineSouit 2016Arun KumarNessuna valutazione finora
- Kadhim (2018)Documento8 pagineKadhim (2018)Fernanda LealNessuna valutazione finora
- Robust Motion Control Architecture For An Upper-Limb Rehabilitation ExosuitDocumento18 pagineRobust Motion Control Architecture For An Upper-Limb Rehabilitation ExosuitJuan Carlos Quispe CruzNessuna valutazione finora
- Above Knee Prosthetic Limb ModelingDocumento38 pagineAbove Knee Prosthetic Limb Modelingmarwan alobaidiNessuna valutazione finora
- Influência Das Forças Rotacionais Na Estabilidade Pode Ser Minimizada Por Jateamento - KIMDocumento9 pagineInfluência Das Forças Rotacionais Na Estabilidade Pode Ser Minimizada Por Jateamento - KIMUrsula Pantigozo MoránNessuna valutazione finora
- Kinematic and Kinetic Functional RequirementsgDocumento28 pagineKinematic and Kinetic Functional RequirementsgMabel PNessuna valutazione finora
- FulltextDocumento10 pagineFulltextDenis AlexandruNessuna valutazione finora
- Plagiarized First 1reportDocumento39 paginePlagiarized First 1reportAbdul RabbaniNessuna valutazione finora
- Protesis 13Documento9 pagineProtesis 13ana márquezNessuna valutazione finora
- Benemerito EDEMDocumento10 pagineBenemerito EDEMIvan BenemeritoNessuna valutazione finora
- Real-Time Knee Adduction Moment Feedback Training Using An Elliptical TrainerDocumento10 pagineReal-Time Knee Adduction Moment Feedback Training Using An Elliptical TrainerSilvana AiadNessuna valutazione finora
- Medical Engineering and Physics: A. Collo, S. Almouahed, P. Poignet, C. Hamitouche, E. StindelDocumento7 pagineMedical Engineering and Physics: A. Collo, S. Almouahed, P. Poignet, C. Hamitouche, E. StindelLuís CamposNessuna valutazione finora
- Comparison Ofthree Facebowsemiadjustable Articulator2233Documento6 pagineComparison Ofthree Facebowsemiadjustable Articulator2233Brijesh MaskeyNessuna valutazione finora
- Design and Operation of Human Locomotion SystemsDa EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNessuna valutazione finora
- W13018-YT01-GDF-457110 Rev 5-APVDocumento8 pagineW13018-YT01-GDF-457110 Rev 5-APVJosé santanaNessuna valutazione finora
- The Profile of Conveyor TrajectoriesDocumento11 pagineThe Profile of Conveyor TrajectoriesJosé santanaNessuna valutazione finora
- Analytical and Numerical Investigations Into Belt Conveyor TransfersDocumento34 pagineAnalytical and Numerical Investigations Into Belt Conveyor TransfersJosé santanaNessuna valutazione finora
- The Prediction of Conveyor Trajectories: DB Hastie and PW WypychDocumento17 pagineThe Prediction of Conveyor Trajectories: DB Hastie and PW WypychJosé santanaNessuna valutazione finora
- Validation of Particle Flow Through A Conveyor Transfer Hood Via Particle Velocity AnalysisDocumento6 pagineValidation of Particle Flow Through A Conveyor Transfer Hood Via Particle Velocity AnalysisJosé santanaNessuna valutazione finora
- Modelling and Design of Complete Conveyor Transfers: D.B. Hastie, A.P. Grima and P.W. WypychDocumento20 pagineModelling and Design of Complete Conveyor Transfers: D.B. Hastie, A.P. Grima and P.W. WypychJosé santanaNessuna valutazione finora
- Luis 48Documento7 pagineLuis 48José santanaNessuna valutazione finora
- The Prediction of Conveyor Trajectories: DB Hastie and PW WypychDocumento17 pagineThe Prediction of Conveyor Trajectories: DB Hastie and PW WypychJosé santanaNessuna valutazione finora
- Conveyor Trajectory Discharge AnglesDocumento10 pagineConveyor Trajectory Discharge AnglesJosé santanaNessuna valutazione finora
- Belt Conveyors: Mechanical Engineering Department Carlos III UniversityDocumento19 pagineBelt Conveyors: Mechanical Engineering Department Carlos III UniversityJosé santanaNessuna valutazione finora
- What Is The Role of Wear Testing and Joint Simulator Studies in Discriminating Among Materials and Designs?Documento9 pagineWhat Is The Role of Wear Testing and Joint Simulator Studies in Discriminating Among Materials and Designs?José santanaNessuna valutazione finora
- The Effect of Counterface Roughness On The Wear of UHMWPE For Rectangular Wear PathsDocumento8 pagineThe Effect of Counterface Roughness On The Wear of UHMWPE For Rectangular Wear PathsJosé santanaNessuna valutazione finora
- Ready To Download: Sandisk® Secureaccess™ For Mac UsersDocumento1 paginaReady To Download: Sandisk® Secureaccess™ For Mac UsersJosé santanaNessuna valutazione finora
- Polyethylene Particles From A Hip Simulator Cause Ca Release From Cultured BoneDocumento8 paginePolyethylene Particles From A Hip Simulator Cause Ca Release From Cultured BoneJosé santanaNessuna valutazione finora
- In Vivo: Nanometer Size Wear Debris Generated From Ultra High Molecular Weight PolyethyleneDocumento7 pagineIn Vivo: Nanometer Size Wear Debris Generated From Ultra High Molecular Weight PolyethyleneJosé santanaNessuna valutazione finora
- A Hip Wear Simulator With 100 Test StationsDocumento10 pagineA Hip Wear Simulator With 100 Test StationsJosé santanaNessuna valutazione finora
- Can Centrifugation Affect The Morphology of Polyethylene Wear Debris?Documento4 pagineCan Centrifugation Affect The Morphology of Polyethylene Wear Debris?José santanaNessuna valutazione finora
- PINO DISCO Influence OfcrosslinkedpolyethylenestructureonwearofjointreplacementsDocumento13 paginePINO DISCO Influence OfcrosslinkedpolyethylenestructureonwearofjointreplacementsJosé santanaNessuna valutazione finora
- A Unified Theory of Wear For Ultra-High Molecular Weight Polyethylene in Multi-Directional SlidingDocumento10 pagineA Unified Theory of Wear For Ultra-High Molecular Weight Polyethylene in Multi-Directional SlidingJosé santanaNessuna valutazione finora
- 08 FEM FEA Stress Analysis of A Light Commercial Vehicle Chassis by FEM PiaggioDocumento5 pagine08 FEM FEA Stress Analysis of A Light Commercial Vehicle Chassis by FEM PiaggioSankalp SharmaNessuna valutazione finora
- Simulation Premium Nonlinear and Dynamics Package - Training - SOLIDWORKS PDFDocumento3 pagineSimulation Premium Nonlinear and Dynamics Package - Training - SOLIDWORKS PDFAjay KumthekarNessuna valutazione finora
- Grace Ann Lautrizo Bsed Fil Iii-A: ST STDocumento8 pagineGrace Ann Lautrizo Bsed Fil Iii-A: ST STGrace Ann LautrizoNessuna valutazione finora
- DSS EnglDocumento57 pagineDSS EnglCorina BarangaNessuna valutazione finora
- Rele NotesDocumento58 pagineRele NotesXagustNessuna valutazione finora
- Marine Safety Environmental Risk and Reliability SeriesDocumento173 pagineMarine Safety Environmental Risk and Reliability SeriesDean PauliNessuna valutazione finora
- Acrome Robotik Mekatronik SIS. SAN. VE TIC. A.S.Documento11 pagineAcrome Robotik Mekatronik SIS. SAN. VE TIC. A.S.Daniel ZakiNessuna valutazione finora
- Havok OverviewDocumento33 pagineHavok OverviewAbriel HaqqaniNessuna valutazione finora
- Dyson Innovation Yields Revolutionary ProductsDocumento3 pagineDyson Innovation Yields Revolutionary ProductsChloéNessuna valutazione finora
- 00 Dobot Blockly WorkbookDocumento182 pagine00 Dobot Blockly Workbookdborcic61Nessuna valutazione finora
- Planmeca Simulation Systems Presentation - 1Documento33 paginePlanmeca Simulation Systems Presentation - 1api-19708309Nessuna valutazione finora
- Mining Grade ControlDocumento6 pagineMining Grade Controlminerito221178% (9)
- Appraisal of Alternative Methods For ForesightDocumento25 pagineAppraisal of Alternative Methods For ForesightIan MilesNessuna valutazione finora
- Modal Analysis of Titan Cantilever Beam Using ANSYS and SolidWorksDocumento5 pagineModal Analysis of Titan Cantilever Beam Using ANSYS and SolidWorksMohammed AbdulnaserNessuna valutazione finora
- Operations Research Project PresentationDocumento10 pagineOperations Research Project PresentationSarabjeet SinghNessuna valutazione finora
- Advanced Simulation of Power Consumption of Electric VehiclesDocumento7 pagineAdvanced Simulation of Power Consumption of Electric Vehiclesfast scopeNessuna valutazione finora
- Pearl River Tower, Guangzhou: Fire Protection Strategies For An Energy Efficient High-Rise BuildingDocumento7 paginePearl River Tower, Guangzhou: Fire Protection Strategies For An Energy Efficient High-Rise BuildingDorin DavidNessuna valutazione finora
- Relative Advantage of Using Different Types of Instructional Software in The ClassroomDocumento5 pagineRelative Advantage of Using Different Types of Instructional Software in The ClassroomnatecannonNessuna valutazione finora
- Design and Simulation of An Automated WH PDFDocumento6 pagineDesign and Simulation of An Automated WH PDFta21rahNessuna valutazione finora
- Robotic GoalkeeperDocumento25 pagineRobotic Goalkeeperstudsudzzz100% (3)
- ادارة مكمنية جامعة البصرةDocumento124 pagineادارة مكمنية جامعة البصرةU PetrolNessuna valutazione finora
- Severn Guranteed AccuracyDocumento7 pagineSevern Guranteed AccuracydharankmuraliNessuna valutazione finora
- Vrishank Resume New-1Documento1 paginaVrishank Resume New-1api-599289473Nessuna valutazione finora
- New Microsoft Office Word DocumentDocumento4 pagineNew Microsoft Office Word DocumentSatish17880% (1)
- Sample For Solution Manual Theory and Design For Mechanical Measurements 6th Edition by Figliola & BeasleyDocumento30 pagineSample For Solution Manual Theory and Design For Mechanical Measurements 6th Edition by Figliola & BeasleyM.R.ZNessuna valutazione finora
- TheDirectionofFoundryIndustry Towardthefoundry4 0Documento7 pagineTheDirectionofFoundryIndustry Towardthefoundry4 0Vijay YadavNessuna valutazione finora
- Premium and Atrium Using Unity Pro: Fipway Network User ManualDocumento126 paginePremium and Atrium Using Unity Pro: Fipway Network User ManualarfeemNessuna valutazione finora
- Nsekuye JeanBosco ResumeDocumento4 pagineNsekuye JeanBosco ResumeJean NsekuyeNessuna valutazione finora
- 2013 PLMEurope 24.10.17-13-30 GEORG-PIEPENBROCK SPLM Validation of Plant Performance and Plant Control With Tecnomatix Plant Simulati PDFDocumento48 pagine2013 PLMEurope 24.10.17-13-30 GEORG-PIEPENBROCK SPLM Validation of Plant Performance and Plant Control With Tecnomatix Plant Simulati PDFRodrigo CalloniNessuna valutazione finora