Potrebbero piacerti anche
- Docentes Efetivos Titulacao IFSCDocumento1 paginaDocentes Efetivos Titulacao IFSCniltoncebraNessuna valutazione finora
- Dissertacao - Deivis - Modelagem e Controle de Retificadores PWM Trifásicos Empregando Trasformação de Park PDFDocumento175 pagineDissertacao - Deivis - Modelagem e Controle de Retificadores PWM Trifásicos Empregando Trasformação de Park PDFniltoncebraNessuna valutazione finora
- Formulario Submissão Edital - 2020 - SAO JOSEDocumento3 pagineFormulario Submissão Edital - 2020 - SAO JOSEniltoncebraNessuna valutazione finora
- Consup Resolucao61 2016 ExtensaoDocumento11 pagineConsup Resolucao61 2016 ExtensaoniltoncebraNessuna valutazione finora
- PWM Retif. TrifasicosDocumento274 paginePWM Retif. TrifasicoslinconNessuna valutazione finora
- PROEX 34 2019 Edital - Media - Duracao - Retificado 05 02 20Documento32 paginePROEX 34 2019 Edital - Media - Duracao - Retificado 05 02 20niltoncebraNessuna valutazione finora
- Edital - 2020 - SAO JOSE - Retificação 10.02Documento16 pagineEdital - 2020 - SAO JOSE - Retificação 10.02niltoncebraNessuna valutazione finora
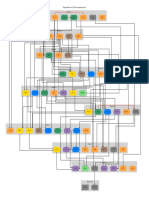
- Cadeias RequisitosDocumento1 paginaCadeias RequisitosniltoncebraNessuna valutazione finora
- Edital - 2020 - SAO JOSE - Retificação 10.02Documento16 pagineEdital - 2020 - SAO JOSE - Retificação 10.02niltoncebraNessuna valutazione finora
- Apostila Excel Pet Mecc3a2nica PDFDocumento50 pagineApostila Excel Pet Mecc3a2nica PDFSilvio BragaNessuna valutazione finora
- Res Cepe 100-2019 - FinalDocumento8 pagineRes Cepe 100-2019 - FinalEdmilsonNessuna valutazione finora
- Controle Ativo Da Corrente Entre Pontes Ret A Tiristor em Paralelo - Dissertação, Mário INEP PDFDocumento201 pagineControle Ativo Da Corrente Entre Pontes Ret A Tiristor em Paralelo - Dissertação, Mário INEP PDFniltoncebraNessuna valutazione finora
- Edital 26 2019 PROPPI Fluxo ContinuoDocumento13 pagineEdital 26 2019 PROPPI Fluxo ContinuoNilton SilvaNessuna valutazione finora
- Análise Carga Horária DocenteDocumento6 pagineAnálise Carga Horária DocenteniltoncebraNessuna valutazione finora
- Instalando LaTeX no WindowsDocumento33 pagineInstalando LaTeX no WindowsApollo SilvaNessuna valutazione finora
- Novo conversor CC-CC flyback-push-pull corrente alimentadoDocumento217 pagineNovo conversor CC-CC flyback-push-pull corrente alimentadoniltoncebraNessuna valutazione finora
- Dissertacao - Deivis - Modelagem e Controle de Retificadores PWM Trifásicos Empregando Trasformação de Park PDFDocumento175 pagineDissertacao - Deivis - Modelagem e Controle de Retificadores PWM Trifásicos Empregando Trasformação de Park PDFniltoncebraNessuna valutazione finora
- Boost Célula 4 Estados (Tese Peraca) PDFDocumento269 pagineBoost Célula 4 Estados (Tese Peraca) PDFniltoncebraNessuna valutazione finora
- Projeto Pedagógico do Curso de Engenharia Elétrica da UFSCDocumento43 pagineProjeto Pedagógico do Curso de Engenharia Elétrica da UFSCniltoncebraNessuna valutazione finora
- 51 2019 Proppi Proex PDFDocumento17 pagine51 2019 Proppi Proex PDFniltoncebraNessuna valutazione finora
- Retificador 3ph Isolado FP1 (Boost) Baseado No Transformador Scott - Dissertação, Stephanie PDFDocumento280 pagineRetificador 3ph Isolado FP1 (Boost) Baseado No Transformador Scott - Dissertação, Stephanie PDFniltoncebraNessuna valutazione finora
- Uma nova família de inversores com comutação suave através de grampeamento ativoDocumento176 pagineUma nova família de inversores com comutação suave através de grampeamento ativoniltoncebraNessuna valutazione finora
- dissRomeuAntunesFriedemann PDFDocumento210 paginedissRomeuAntunesFriedemann PDFniltoncebraNessuna valutazione finora
- Projeto Pedagógico do Curso de Engenharia Elétrica da UFSCDocumento43 pagineProjeto Pedagógico do Curso de Engenharia Elétrica da UFSCniltoncebraNessuna valutazione finora
- Registrar ANP no SigaaDocumento6 pagineRegistrar ANP no SigaaniltoncebraNessuna valutazione finora
- Proteus AnacomDocumento123 pagineProteus AnacomVirgínia Maria De França Genuíno Campos100% (1)
- Lista de Exercicios - Transistores - Gabarito - Eletrônica PDFDocumento8 pagineLista de Exercicios - Transistores - Gabarito - Eletrônica PDFAndersonffcNessuna valutazione finora
- Boletim Epidemiológico - PMSJ - 01 PDFDocumento6 pagineBoletim Epidemiológico - PMSJ - 01 PDFniltoncebraNessuna valutazione finora
- ESSS-Virtual-Ementa-Curso-Simulação-Multifisica-com-o-ANSYS DiscoveryDocumento1 paginaESSS-Virtual-Ementa-Curso-Simulação-Multifisica-com-o-ANSYS DiscoveryJean HilárioNessuna valutazione finora
- Diretrizes Internas ANPs - IFSC - SJE PDFDocumento5 pagineDiretrizes Internas ANPs - IFSC - SJE PDFniltoncebraNessuna valutazione finora
- Determinação do Teor de Umidade e Materiais VoláteisDocumento2 pagineDeterminação do Teor de Umidade e Materiais VoláteisJuliana OliveiraNessuna valutazione finora
- Teste3 - 2P - 9ºano (Fev21)Documento3 pagineTeste3 - 2P - 9ºano (Fev21)Sónia PereiraNessuna valutazione finora
- Comparativo Da Revista Náutica Entre A Evolve 265 e A Ventura 265Documento2 pagineComparativo Da Revista Náutica Entre A Evolve 265 e A Ventura 265Rômulo MartinsNessuna valutazione finora
- Isaac Newton - Biografia - O GloboDocumento34 pagineIsaac Newton - Biografia - O GloboJose MeraNessuna valutazione finora
- Registrador de dados LogBox-AADocumento9 pagineRegistrador de dados LogBox-AAEverson DantasNessuna valutazione finora
- Ensino Estruturas Aço Engenharia ArquiteturaDocumento171 pagineEnsino Estruturas Aço Engenharia ArquiteturapeanutfilNessuna valutazione finora
- Dnit 106-2009 - Es - CortesDocumento13 pagineDnit 106-2009 - Es - CortesThiago T.Nessuna valutazione finora
- Relatorio Emulsão EscabicidaDocumento6 pagineRelatorio Emulsão EscabicidaSegundo ChavesNessuna valutazione finora
- Estudo de Confiabilidade - Preditiva VALE X Engenharia SKFDocumento30 pagineEstudo de Confiabilidade - Preditiva VALE X Engenharia SKFdaniel atachaguaNessuna valutazione finora
- Scratch e o Pensamento SistêmicoDocumento5 pagineScratch e o Pensamento SistêmicoOmero AlvesNessuna valutazione finora
- Imites Exercícios ResolvidosDocumento3 pagineImites Exercícios Resolvidosfernando meloNessuna valutazione finora
- Ciclo Cardíaco: Etapas da Excitação e Contração do CoraçãoDocumento9 pagineCiclo Cardíaco: Etapas da Excitação e Contração do CoraçãoSabrina XavierNessuna valutazione finora
- 3 Estabilidade Estatica Latero DirecionalDocumento46 pagine3 Estabilidade Estatica Latero DirecionalLeandro BarbosaNessuna valutazione finora
- Apostila de OplatDocumento59 pagineApostila de OplatTania Barbosa50% (2)
- Texto 9 - Grandezas e MedidasDocumento13 pagineTexto 9 - Grandezas e MedidascamilamolieviraNessuna valutazione finora
- Solubilidade de sais e açúcares: curvas e fatores que influenciamDocumento22 pagineSolubilidade de sais e açúcares: curvas e fatores que influenciamRebecaNessuna valutazione finora
- Manual Access 2007 com tabelas, formulários, consultas e relatóriosDocumento37 pagineManual Access 2007 com tabelas, formulários, consultas e relatóriosAntonio Manuel SaramagoNessuna valutazione finora
- Determinação de cálcio na casca de ovoDocumento17 pagineDeterminação de cálcio na casca de ovolory_contreirasNessuna valutazione finora
- Questionário Laboratorial 2: Teste de ChamaDocumento2 pagineQuestionário Laboratorial 2: Teste de ChamaNatercia RodriguesNessuna valutazione finora
- Exercícios Química ElementarDocumento15 pagineExercícios Química ElementarESCOLA CETECNessuna valutazione finora
- Aeroporto de Lisboa. Portela: Prolongar TaxiwayDocumento9 pagineAeroporto de Lisboa. Portela: Prolongar TaxiwayAntónio Cerveira PintoNessuna valutazione finora
- Modelo de VerhulstDocumento34 pagineModelo de VerhulstsilviaNessuna valutazione finora
- Pedro IiDocumento176 paginePedro Iiliherberth moraesNessuna valutazione finora
- Eletrólise e estequiometria em exercíciosDocumento24 pagineEletrólise e estequiometria em exercíciosPaulo VictorNessuna valutazione finora
- Manualir 6000Documento1 paginaManualir 6000Alexandre Da Silva PintoNessuna valutazione finora
- Mat 2Documento2 pagineMat 2Joana FerreiraNessuna valutazione finora
- Dimensionamento de Condutores2 PDFDocumento24 pagineDimensionamento de Condutores2 PDFCrisanto Jimmy100% (1)
- Operador de CaldeiraDocumento129 pagineOperador de CaldeiraVeridiano Ribeiro83% (6)
- Orientações para entrega da lista de carnavalDocumento22 pagineOrientações para entrega da lista de carnavalAnonymous JJbrn9zebNessuna valutazione finora