Potrebbero piacerti anche
- 22 2 Applctn Eignval EignvecDocumento12 pagine22 2 Applctn Eignval EignvecEbookcrazeNessuna valutazione finora
- 22 2 Applctn Eignval EignvecDocumento12 pagine22 2 Applctn Eignval EignvecDaniel SolhNessuna valutazione finora
- Linear Algebra, Infinite Dimensional Spaces, and MAPLE: Definition A Projection Is A Transformation P From EDocumento6 pagineLinear Algebra, Infinite Dimensional Spaces, and MAPLE: Definition A Projection Is A Transformation P From ESaugat KarNessuna valutazione finora
- LINEAR RECURRENCEDocumento14 pagineLINEAR RECURRENCEnirajcj0% (1)
- Hydrogen Atom: Numerical MethodsDocumento11 pagineHydrogen Atom: Numerical MethodsBryan HarterNessuna valutazione finora
- The World of Eigenvalues-Eigenfunctions: Eigenfunction EigenvalueDocumento9 pagineThe World of Eigenvalues-Eigenfunctions: Eigenfunction EigenvalueRaj KumarNessuna valutazione finora
- Groups and Geometry The Second Part of Algebra and Geometry: T.W.K Orner April 20, 2007Documento67 pagineGroups and Geometry The Second Part of Algebra and Geometry: T.W.K Orner April 20, 2007rasromeoNessuna valutazione finora
- MTH101Documento13 pagineMTH101Deepanshu BansalNessuna valutazione finora
- Notes On Divide-and-Conquer and Dynamic Programming.: 1 N 1 n/2 n/2 +1 NDocumento11 pagineNotes On Divide-and-Conquer and Dynamic Programming.: 1 N 1 n/2 n/2 +1 NMrunal RuikarNessuna valutazione finora
- Chapter ECCDocumento11 pagineChapter ECCIsmail IfakirNessuna valutazione finora
- Student Lecture 32 Systems of ODEsDocumento5 pagineStudent Lecture 32 Systems of ODEsuploadingpersonNessuna valutazione finora
- Principal Components Analysis (PCA) : 2.1 Outline of TechniqueDocumento21 paginePrincipal Components Analysis (PCA) : 2.1 Outline of TechniqueGeorge WangNessuna valutazione finora
- Self Adjoint Transformations in Inner-Product SpacesDocumento6 pagineSelf Adjoint Transformations in Inner-Product SpacesmohammadH7Nessuna valutazione finora
- Applied Multivariate Analysis NotesDocumento100 pagineApplied Multivariate Analysis NotesAtrsaw AzanieNessuna valutazione finora
- Homework 7 Solutions: 5.2 - DiagonalizabilityDocumento7 pagineHomework 7 Solutions: 5.2 - DiagonalizabilityCody SageNessuna valutazione finora
- Numerical Solution Methods: 3.1.1 Matrices and Vectors in FortranDocumento9 pagineNumerical Solution Methods: 3.1.1 Matrices and Vectors in FortranLucas SantosNessuna valutazione finora
- Lesson 8 Diagonalization of Matrices: Module 1: Matrices and Linear AlgebraDocumento8 pagineLesson 8 Diagonalization of Matrices: Module 1: Matrices and Linear Algebraarpit sharmaNessuna valutazione finora
- Lecture # 7: Eigenvalues, Eigenvectors and Diagonalization Learning OutcomesDocumento21 pagineLecture # 7: Eigenvalues, Eigenvectors and Diagonalization Learning OutcomesAleep YoungBaeNessuna valutazione finora
- Primal-Dual Interior Point Method ReportDocumento8 paginePrimal-Dual Interior Point Method ReportjayroldparcedeNessuna valutazione finora
- Further Mathematical Methods (Linear Algebra) 2002 Solutions For Problem Sheet 6Documento10 pagineFurther Mathematical Methods (Linear Algebra) 2002 Solutions For Problem Sheet 6Gag PafNessuna valutazione finora
- Eigen Values, Eigen Vectors - Afzaal - 1Documento81 pagineEigen Values, Eigen Vectors - Afzaal - 1syedabdullah786Nessuna valutazione finora
- Class 17Documento4 pagineClass 17masyuki1979Nessuna valutazione finora
- Tutorial on solving nonlinear ODEs using MatlabDocumento14 pagineTutorial on solving nonlinear ODEs using MatlabTrolldaddyNessuna valutazione finora
- FEM simulation of heat equation on cylindrical rodDocumento19 pagineFEM simulation of heat equation on cylindrical rodMohammad Rizwan MalikNessuna valutazione finora
- Modal Analysis Approximate MethodsDocumento9 pagineModal Analysis Approximate MethodsRafaAlmeidaNessuna valutazione finora
- CGN 3421 - Numerical Methods Lecture 3Documento15 pagineCGN 3421 - Numerical Methods Lecture 3sori1386Nessuna valutazione finora
- Engineering ComputationDocumento16 pagineEngineering ComputationAnonymous oYtSN7SNessuna valutazione finora
- Fem SupportDocumento15 pagineFem SupportbasarkNessuna valutazione finora
- Linear System Theory 2 e SolDocumento106 pagineLinear System Theory 2 e SolShruti Mahadik78% (23)
- Il ReconciliatioDocumento37 pagineIl ReconciliatioIan BeardsleyNessuna valutazione finora
- Numerical Solution of Ordinary Differential Equations Part 2 - Nonlinear EquationsDocumento38 pagineNumerical Solution of Ordinary Differential Equations Part 2 - Nonlinear EquationsMelih TecerNessuna valutazione finora
- Module 7: Discrete State Space Models: Lecture Note 3Documento7 pagineModule 7: Discrete State Space Models: Lecture Note 3Ansari RehanNessuna valutazione finora
- The Mean Value of A New Arithmetical FunctionDocumento4 pagineThe Mean Value of A New Arithmetical FunctionMia AmaliaNessuna valutazione finora
- Kesavan NewDocumento20 pagineKesavan NewPulkit SaxenaNessuna valutazione finora
- Reconciling Quantum Mechanics With RelativityDocumento22 pagineReconciling Quantum Mechanics With RelativityIan BeardsleyNessuna valutazione finora
- Matrix Fundamentals for Engineering StudentsDocumento23 pagineMatrix Fundamentals for Engineering StudentspsnspkNessuna valutazione finora
- Introduction to Finite Element MethodDocumento10 pagineIntroduction to Finite Element MethodIsrael AGNessuna valutazione finora
- ProblemsDocumento62 pagineProblemserad_5Nessuna valutazione finora
- Eigenvalues and Eigenvectors ExplainedDocumento14 pagineEigenvalues and Eigenvectors ExplainedIsaac AsareNessuna valutazione finora
- Math 110: Linear Algebra Homework #8: David ZywinaDocumento8 pagineMath 110: Linear Algebra Homework #8: David ZywinaCody SageNessuna valutazione finora
- Dimensionality Reduction Unit-5 Dr. H C Vijayalakshmi: Reference 1. AmpleDocumento66 pagineDimensionality Reduction Unit-5 Dr. H C Vijayalakshmi: Reference 1. AmpleBatemanNessuna valutazione finora
- McGill U Math 325A: Intro to Systems of Linear Differential EquationsDocumento4 pagineMcGill U Math 325A: Intro to Systems of Linear Differential Equationservin_osmanagićNessuna valutazione finora
- 22 4 Numrcl Detrmntn Eignvl EignvcDocumento8 pagine22 4 Numrcl Detrmntn Eignvl EignvcDaniel SolhNessuna valutazione finora
- ADOMIAN Decomposition Method For Solvin1Documento18 pagineADOMIAN Decomposition Method For Solvin1Susi SusilowatiNessuna valutazione finora
- Some Modified Matrix Eigenvalue: E 2 (X), (A I) A (X) - (9) ) - A (A) O'i (A O'2 (A A, (A) 21 (A) 22 (A) 2, (A)Documento17 pagineSome Modified Matrix Eigenvalue: E 2 (X), (A I) A (X) - (9) ) - A (A) O'i (A O'2 (A A, (A) 21 (A) 22 (A) 2, (A)Satyavir YadavNessuna valutazione finora
- Systems and MatricesDocumento15 pagineSystems and MatricesTom DavisNessuna valutazione finora
- Notes On Adjoint Methods MITDocumento6 pagineNotes On Adjoint Methods MITDudu ZhangNessuna valutazione finora
- Numerically stable LDL factorizations in IPMs for convex QPDocumento21 pagineNumerically stable LDL factorizations in IPMs for convex QPmajed_ahmadi1984943Nessuna valutazione finora
- SOLVING NONHOMOGENEOUS LINEAR SYSTEMSDocumento18 pagineSOLVING NONHOMOGENEOUS LINEAR SYSTEMSd1ucpmq+lny4lsNessuna valutazione finora
- TMA4165 Differential Equations and Dynamical Systems Exercise Set 1Documento2 pagineTMA4165 Differential Equations and Dynamical Systems Exercise Set 1salimNessuna valutazione finora
- Lec3 PDFDocumento9 pagineLec3 PDFyacp16761Nessuna valutazione finora
- QR Decomposition ExplainedDocumento12 pagineQR Decomposition ExplainedSakıp Mehmet Küçük0% (1)
- VolumequickDocumento21 pagineVolumequickHiGrill25Nessuna valutazione finora
- 2 DifferenceEqtnDocumento10 pagine2 DifferenceEqtnHeng ChocNessuna valutazione finora
- CS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement LearningDocumento5 pagineCS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement Learningsuhar adiNessuna valutazione finora
- Matrix ExponentialDocumento14 pagineMatrix Exponentialvignesh0617Nessuna valutazione finora
- Mark Rusi BolDocumento55 pagineMark Rusi BolPat BustillosNessuna valutazione finora
- A-level Maths Revision: Cheeky Revision ShortcutsDa EverandA-level Maths Revision: Cheeky Revision ShortcutsValutazione: 3.5 su 5 stelle3.5/5 (8)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsDa EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNessuna valutazione finora
- FSKII Breaker BrochureDocumento10 pagineFSKII Breaker BrochureAnonymous zfmlsb2GjANessuna valutazione finora
- Emtp4 PDFDocumento86 pagineEmtp4 PDFManuel PulidoNessuna valutazione finora
- Manual 26260: Governing Fundamentals and Power ManagementDocumento76 pagineManual 26260: Governing Fundamentals and Power Managementmarius_1959Nessuna valutazione finora
- Combustion Turbines and Reciprocating Engines For Grid SupportDocumento102 pagineCombustion Turbines and Reciprocating Engines For Grid SupportAnonymous zfmlsb2GjA100% (1)
- EWEC 2009 - Marseille - 16-19 MarchDocumento10 pagineEWEC 2009 - Marseille - 16-19 Marchtung020581Nessuna valutazione finora
- EMTP-RV Nuclear Power Plant StudiesDocumento20 pagineEMTP-RV Nuclear Power Plant StudiesAnonymous zfmlsb2GjANessuna valutazione finora
- ArresterFacts 037 Insulation Coordination FundamentalsDocumento8 pagineArresterFacts 037 Insulation Coordination FundamentalsMang PorongNessuna valutazione finora
- Reciprocating Engines For Stationary Power Generation Technology Products Players and Business IssuesDocumento186 pagineReciprocating Engines For Stationary Power Generation Technology Products Players and Business IssuesAnonymous zfmlsb2GjANessuna valutazione finora
- Assessment of Small Reciprocating Engine Manufacturers and Generator Set PackagersDocumento66 pagineAssessment of Small Reciprocating Engine Manufacturers and Generator Set PackagersAnonymous zfmlsb2GjA100% (1)
- Coupling Between Transmission Underground Cables and PipelinesDocumento12 pagineCoupling Between Transmission Underground Cables and PipelinesAnonymous zfmlsb2GjANessuna valutazione finora
- 170 EWEC2008fullpaperDocumento10 pagine170 EWEC2008fullpaperAnonymous zfmlsb2GjANessuna valutazione finora
- A Minimal Harmonic Controller For A STATCOMDocumento10 pagineA Minimal Harmonic Controller For A STATCOMAnonymous zfmlsb2GjANessuna valutazione finora
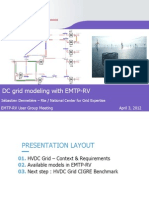
- DC Grid Modeling EMTP-RV UGMDocumento22 pagineDC Grid Modeling EMTP-RV UGMsajuaanalsaNessuna valutazione finora
- 331 EWEC2008fullpaperDocumento9 pagine331 EWEC2008fullpaperAnonymous zfmlsb2GjANessuna valutazione finora
- Emtp6 PDFDocumento46 pagineEmtp6 PDFManuel PulidoNessuna valutazione finora
- High Speed Infrastructure 2008Documento105 pagineHigh Speed Infrastructure 2008Anonymous zfmlsb2GjA100% (1)
- Arc Proof LV Switch GearDocumento34 pagineArc Proof LV Switch GearfridjatNessuna valutazione finora
- CatalogueDocumento330 pagineCatalogueAnonymous zfmlsb2GjA100% (1)
- High Speed Control and Signalling 2002Documento106 pagineHigh Speed Control and Signalling 2002Anonymous zfmlsb2GjANessuna valutazione finora
- Railway Rolling StockDocumento260 pagineRailway Rolling StockAnonymous zfmlsb2GjA100% (1)
- Overview of Different Wind Generator Systems and Their ComparisonsDocumento16 pagineOverview of Different Wind Generator Systems and Their ComparisonsAnonymous zfmlsb2GjANessuna valutazione finora
- Short Circuit Current Contribution For Different Wind Turbine Generator TypesDocumento11 pagineShort Circuit Current Contribution For Different Wind Turbine Generator TypesRobertoFavNessuna valutazione finora
- Railways MagazineDocumento35 pagineRailways MagazineAnonymous zfmlsb2GjANessuna valutazione finora
- Railways MagazineDocumento35 pagineRailways MagazineAnonymous zfmlsb2GjANessuna valutazione finora
- Hand Book On Railway Signalling in Indian RailwaysDocumento157 pagineHand Book On Railway Signalling in Indian RailwaysVikas Srivastav100% (86)
- Pipeline Corrosion and Cathodic ProtectionDocumento177 paginePipeline Corrosion and Cathodic Protectionapi-3698973100% (12)
- Hand Book On Railway Signalling in Indian RailwaysDocumento157 pagineHand Book On Railway Signalling in Indian RailwaysVikas Srivastav100% (86)
- A Single-Phase Hybrid Active Power FilterDocumento240 pagineA Single-Phase Hybrid Active Power Filterpqt100% (9)
- Analysis of Air-Core Reactors using PEEC ModelsDocumento10 pagineAnalysis of Air-Core Reactors using PEEC ModelsAnonymous zfmlsb2GjANessuna valutazione finora
- Informatica MDM Design GuideDocumento130 pagineInformatica MDM Design GuideRakesh BobbalaNessuna valutazione finora
- Is Machiavelli Still Relevant TodayDocumento3 pagineIs Machiavelli Still Relevant TodayBrian GaraNessuna valutazione finora
- Clarifications On Manglik DoshaDocumento1 paginaClarifications On Manglik Dosharajesh.shirwal382Nessuna valutazione finora
- N 5315 A 0390 BD 2 DDocumento3 pagineN 5315 A 0390 BD 2 DNirvanaMokshaNessuna valutazione finora
- Mining Machine Automation - Pieter PrinslooDocumento13 pagineMining Machine Automation - Pieter PrinslooAmilton filhoNessuna valutazione finora
- G9 Q3 EXAM REVIEW FOR COMPUTER HARDWARE SERVICINGDocumento6 pagineG9 Q3 EXAM REVIEW FOR COMPUTER HARDWARE SERVICINGOliver NaragNessuna valutazione finora
- EHS Auditing Strategies and RegulationsDocumento22 pagineEHS Auditing Strategies and RegulationsSteven Lee0% (1)
- Fine Motor Activities For HomeDocumento6 pagineFine Motor Activities For HomeNoor Farhana NanaNessuna valutazione finora
- A Critical Theory of Medical DiscourseDocumento21 pagineA Critical Theory of Medical DiscourseMarita RodriguezNessuna valutazione finora
- The Chess Tutor John KtejikDocumento8 pagineThe Chess Tutor John KtejikFrancesco Rosseti0% (1)
- EDX As s1 2017 v1Documento4 pagineEDX As s1 2017 v1Virenz PatelzNessuna valutazione finora
- English Club RPHDocumento5 pagineEnglish Club RPHhanibaikNessuna valutazione finora
- Mindray BC-760 and BC-780 series hematology analyzer installation reportDocumento9 pagineMindray BC-760 and BC-780 series hematology analyzer installation reportAndi UkengNessuna valutazione finora
- TKT Unit 17 AssessmentDocumento20 pagineTKT Unit 17 AssessmentPorntip Bodeepongse รักในหลวง100% (3)
- Uts Viewpoints About SelfDocumento5 pagineUts Viewpoints About SelfNorma AmitNessuna valutazione finora
- Self-Cleaning ConcreteDocumento4 pagineSelf-Cleaning ConcreteDzenana Becirhodzic100% (2)
- ADC 0808 and 0809Documento8 pagineADC 0808 and 0809Edwin YesaNessuna valutazione finora
- Poster ContentsDocumento7 paginePoster ContentsDianaSalvateraNessuna valutazione finora
- Ebook Huesker.01Documento19 pagineEbook Huesker.01Marcos MaNessuna valutazione finora
- Angel of Abundance and Prosperity: ChakrasDocumento3 pagineAngel of Abundance and Prosperity: ChakrasCleveland AlexanderNessuna valutazione finora
- Nueva Ecija University of Science and TechnologyDocumento1 paginaNueva Ecija University of Science and TechnologyCalvin Ador DionisioNessuna valutazione finora
- Wikimedia ArchitectureDocumento32 pagineWikimedia Architectureanon-656305100% (12)
- Melody Writing - Part 2: The Tools of Melody - Art of ComposingDocumento17 pagineMelody Writing - Part 2: The Tools of Melody - Art of ComposingNicholas100% (2)
- 3 - Individual Risk Models For A Short Term (Part 1 Exercises Solution)Documento6 pagine3 - Individual Risk Models For A Short Term (Part 1 Exercises Solution)anon_198306106Nessuna valutazione finora
- ArchetypesDocumento3 pagineArchetypesJuma GullNessuna valutazione finora
- HPC @ LSU - Intro to Linux/AIX CommandsDocumento16 pagineHPC @ LSU - Intro to Linux/AIX Commandsjeetmajumdar007Nessuna valutazione finora
- Bbiblio ElectroblioDocumento732 pagineBbiblio ElectroblioratatuNessuna valutazione finora
- Microprocessor Architecture: Introduction To Microprocessors Chapter 2Documento47 pagineMicroprocessor Architecture: Introduction To Microprocessors Chapter 2Ezhilarasan KaliyamoorthyNessuna valutazione finora
- A Computer Program For Excess Water Production Diagnosis Case Study - Heglig Oil Field - SudanDocumento53 pagineA Computer Program For Excess Water Production Diagnosis Case Study - Heglig Oil Field - SudanOmernour1990Nessuna valutazione finora
- PHI 445 Week 3 Case Analysis Case Studies Lehman Brothers, British Petroleum, Monsanto, Merck, Goodyear, Perdue FarmsDocumento3 paginePHI 445 Week 3 Case Analysis Case Studies Lehman Brothers, British Petroleum, Monsanto, Merck, Goodyear, Perdue FarmsrollinsandrewNessuna valutazione finora