Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- EtomDocumento1 paginaEtomarthryxNessuna valutazione finora
- Lullaby by W. H. Auden Lay Your Sleeping Head, MyDocumento2 pagineLullaby by W. H. Auden Lay Your Sleeping Head, MyAaron MerrillNessuna valutazione finora
- Std10 Maths EMDocumento241 pagineStd10 Maths EMAaron Merrill100% (2)
- Love Poems 8Documento1 paginaLove Poems 8Aaron Merrill100% (4)
- Love Poems 4Documento1 paginaLove Poems 4Aaron MerrillNessuna valutazione finora
- Zhui Meng Ren LyricsDocumento1 paginaZhui Meng Ren LyricsAaron MerrillNessuna valutazione finora
- Std12 Geog EMDocumento132 pagineStd12 Geog EMAaron MerrillNessuna valutazione finora
- I Love TheeDocumento1 paginaI Love TheeAaron MerrillNessuna valutazione finora
- Love Poems 1Documento1 paginaLove Poems 1Aaron MerrillNessuna valutazione finora
- Longing by Matthew Arnold (1822 1888) Come To Me inDocumento1 paginaLonging by Matthew Arnold (1822 1888) Come To Me inAaron MerrillNessuna valutazione finora
- Communicative EnglishDocumento376 pagineCommunicative EnglishAaron Merrill100% (2)
- Tamil Nadu 12th Standard HistoryDocumento194 pagineTamil Nadu 12th Standard HistoryIndia History Resources88% (8)
- Prepare For The Buddha Monk LyricsDocumento4 paginePrepare For The Buddha Monk LyricsAaron MerrillNessuna valutazione finora
- Habitation by Margaret Atwood Marriage Is Not A House orDocumento1 paginaHabitation by Margaret Atwood Marriage Is Not A House orAaron MerrillNessuna valutazione finora
- Std12 HomeSci EMDocumento217 pagineStd12 HomeSci EMAaron MerrillNessuna valutazione finora
- Business Mathematics in English 2Documento217 pagineBusiness Mathematics in English 2Sundhar SubramanianNessuna valutazione finora
- Social ScienceDocumento272 pagineSocial ScienceAaron MerrillNessuna valutazione finora
- Std12 Phy Vol 1Documento237 pagineStd12 Phy Vol 1Aaron Merrill50% (2)
- Geography and EconomicsDocumento233 pagineGeography and EconomicsAaron Merrill100% (1)
- Std12 Maths VOL 1Documento298 pagineStd12 Maths VOL 1Aaron MerrillNessuna valutazione finora
- Std12 Phy EM 2Documento256 pagineStd12 Phy EM 2Gimel SteephanNessuna valutazione finora
- Three Dimensional GeometryDocumento39 pagineThree Dimensional GeometryAaron Merrill100% (1)
- Alejandro LyricsDocumento4 pagineAlejandro LyricsTericka JohnsonNessuna valutazione finora
- Std12 PolSci EMDocumento142 pagineStd12 PolSci EMAaron MerrillNessuna valutazione finora
- Std12 Maths VOL 2Documento270 pagineStd12 Maths VOL 2Aaron MerrillNessuna valutazione finora
- Introduction to Mathematical Methods in CombinatoricsDocumento100 pagineIntroduction to Mathematical Methods in Combinatorics@bhiNessuna valutazione finora
- Std10 Maths EMDocumento241 pagineStd10 Maths EMAaron Merrill100% (2)
- Hamming Codes: 4.1 BasicsDocumento14 pagineHamming Codes: 4.1 BasicsRajat RanjanNessuna valutazione finora
- Heart Failure - Causes Symptoms and TreatmentsDocumento5 pagineHeart Failure - Causes Symptoms and TreatmentsAaron MerrillNessuna valutazione finora
- Salt (Sodium) Intake Stroke Cardiovascular DiseaseDocumento2 pagineSalt (Sodium) Intake Stroke Cardiovascular DiseaseAaron MerrillNessuna valutazione finora
- Solo Dolo LyricsDocumento2 pagineSolo Dolo LyricsAaron MerrillNessuna valutazione finora
- A Review On Micro EncapsulationDocumento5 pagineA Review On Micro EncapsulationSneha DharNessuna valutazione finora
- IPA Assignment Analyzes New Public AdministrationDocumento8 pagineIPA Assignment Analyzes New Public AdministrationKumaran ViswanathanNessuna valutazione finora
- Syllabus Agri 2015Documento248 pagineSyllabus Agri 2015parvathivignesh279Nessuna valutazione finora
- ASIA INTERNATIONAL FURNITURE MATERIALS CONTRACTDocumento2 pagineASIA INTERNATIONAL FURNITURE MATERIALS CONTRACTSALOME URUCHI AGUILARNessuna valutazione finora
- MAPEH 6- WEEK 1 ActivitiesDocumento4 pagineMAPEH 6- WEEK 1 ActivitiesCatherine Renante100% (2)
- Science-6 - Q4 - W8-DLL - Mar 10Documento2 pagineScience-6 - Q4 - W8-DLL - Mar 10cristina quiambaoNessuna valutazione finora
- The Effects of Self-Esteem On Makeup InvolvementDocumento9 pagineThe Effects of Self-Esteem On Makeup InvolvementMichelle Nicole Tagupa SerranoNessuna valutazione finora
- HR MasterlistDocumento6 pagineHR MasterlistLeychelle AnnNessuna valutazione finora
- WORK ORDER TITLEDocumento2 pagineWORK ORDER TITLEDesign V-Tork ControlsNessuna valutazione finora
- The Godfather Term One Sample Basic Six Annual Scheme of Learning Termly Scheme of Learning WEEK 1 - 12Documento313 pagineThe Godfather Term One Sample Basic Six Annual Scheme of Learning Termly Scheme of Learning WEEK 1 - 12justice hayfordNessuna valutazione finora
- ADII11 Metode Deteksi OutlierDocumento50 pagineADII11 Metode Deteksi Outlier21-A-2-19 Nazli Amaliya RamadhaniNessuna valutazione finora
- Senior Design Projects 201-2020 - For Website - MEDocumento5 pagineSenior Design Projects 201-2020 - For Website - MEYujbvhujgNessuna valutazione finora
- Action Plan On GadDocumento1 paginaAction Plan On GadCherish Devora ArtatesNessuna valutazione finora
- Managerial Performance Evaluation ProceduresDocumento3 pagineManagerial Performance Evaluation Procedures1robcortesNessuna valutazione finora
- Abiding LonelinessDocumento9 pagineAbiding Lonelinessgrupodelectura04Nessuna valutazione finora
- Studying Supply and Demand of Software Maintenance and Evolution ServicesDocumento6 pagineStudying Supply and Demand of Software Maintenance and Evolution ServicesJorge Arturo Moreno VeasNessuna valutazione finora
- 16SEE - Schedule of PapersDocumento36 pagine16SEE - Schedule of PapersPiyush Jain0% (1)
- Internal Controls and Risk Management: Learning ObjectivesDocumento24 pagineInternal Controls and Risk Management: Learning ObjectivesRamil SagubanNessuna valutazione finora
- Operation 490BDocumento60 pagineOperation 490BYe Min Htike100% (1)
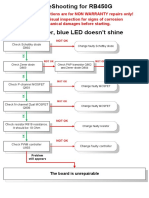
- RB450G Trouble ShootingDocumento9 pagineRB450G Trouble Shootingjocimar1000Nessuna valutazione finora
- CH 11 & CH 12 John R. Schermerhorn - Management-Wiley (2020)Documento16 pagineCH 11 & CH 12 John R. Schermerhorn - Management-Wiley (2020)Muhammad Fariz IbrahimNessuna valutazione finora
- Sinavy Pem Fuel CellDocumento12 pagineSinavy Pem Fuel CellArielDanieli100% (1)
- Catalogue: Product Offering 51Documento56 pagineCatalogue: Product Offering 51Bruno MartinsNessuna valutazione finora
- Calculating Molar MassDocumento5 pagineCalculating Molar MassTracy LingNessuna valutazione finora
- Tithi PRAVESHADocumento38 pagineTithi PRAVESHAdbbircs100% (1)
- Mil B 49430BDocumento36 pagineMil B 49430Bparam.vennelaNessuna valutazione finora
- DLP Din8Documento2 pagineDLP Din8KOUDJIL MohamedNessuna valutazione finora
- Republic of The Philippines Iba, Zambales: President Ramon Magsaysay State UniversityDocumento3 pagineRepublic of The Philippines Iba, Zambales: President Ramon Magsaysay State UniversityErika Joy EscobarNessuna valutazione finora
- Empowerment Technology - Week 2Documento3 pagineEmpowerment Technology - Week 2yahgieNessuna valutazione finora