Potrebbero piacerti anche
- Justine's Memoirs On Actual Freedom (Part - I)Documento61 pagineJustine's Memoirs On Actual Freedom (Part - I)JustineNessuna valutazione finora
- Pmi ManDocumento8 paginePmi ManCalandrasReyCalandrasreyNessuna valutazione finora
- SO 1342 C Part 1 Engine Room Simulator MAN BW 5L90MC L11 PDFDocumento22 pagineSO 1342 C Part 1 Engine Room Simulator MAN BW 5L90MC L11 PDFDóriclo FernandesNessuna valutazione finora
- Functional safety manual for Liquiphant M/S with electronic insert FEL54Documento12 pagineFunctional safety manual for Liquiphant M/S with electronic insert FEL54Imran HaiderNessuna valutazione finora
- Unmanned Machinery SpacesDocumento20 pagineUnmanned Machinery SpacesRazaq PayapoNessuna valutazione finora
- General EK (Control)Documento22 pagineGeneral EK (Control)Maneesh100% (1)
- Electric Engineering and ControlDocumento4 pagineElectric Engineering and ControlJanmayjay SwetankNessuna valutazione finora
- Gioi Thieu Dong Co MANBW ME-CDocumento26 pagineGioi Thieu Dong Co MANBW ME-CMitdac HP0% (1)
- Advanced Process Control A Complete Guide - 2020 EditionDa EverandAdvanced Process Control A Complete Guide - 2020 EditionNessuna valutazione finora
- Process Control System A Complete Guide - 2020 EditionDa EverandProcess Control System A Complete Guide - 2020 EditionNessuna valutazione finora
- Smart ODME Computer Module Measures Oil DischargeDocumento4 pagineSmart ODME Computer Module Measures Oil DischargePankajNessuna valutazione finora
- K-Chief: All Control Requirements Fulfilled - in A Uniform SystemDocumento16 pagineK-Chief: All Control Requirements Fulfilled - in A Uniform Systemdnse90900Nessuna valutazione finora
- Electronically ControlledDocumento353 pagineElectronically ControlledAnonymous yRpebGJGaNessuna valutazione finora
- Oil Mist Detector Testing ProcedureDocumento7 pagineOil Mist Detector Testing Procedureavm4343Nessuna valutazione finora
- 04 RT Flex Comp SystDocumento64 pagine04 RT Flex Comp SystA MovahediNessuna valutazione finora
- Manual Simulator TechSimDocumento246 pagineManual Simulator TechSimAlefterix Anca100% (1)
- Engine Control System (Jan2015)Documento26 pagineEngine Control System (Jan2015)A.i. StergianosNessuna valutazione finora
- Electronic EngineDocumento4 pagineElectronic EngineSoumyadeep BhattacharyyaNessuna valutazione finora
- Airguard 3as 2005.2.15Documento35 pagineAirguard 3as 2005.2.15TMZNessuna valutazione finora
- Pdfs Level DaticDocumento6 paginePdfs Level DaticJamal28100% (1)
- Automatic Unloading SystemDocumento3 pagineAutomatic Unloading Systemnirmalgupte22Nessuna valutazione finora
- IAS Training SimulatorDocumento8 pagineIAS Training SimulatorAnonymous icnhaNsFNessuna valutazione finora
- Procedure To Discharge Clean Bilge Training - enDocumento3 pagineProcedure To Discharge Clean Bilge Training - enclaudioNessuna valutazione finora
- Ho RTF Rev 3 2016Documento259 pagineHo RTF Rev 3 2016MarkNessuna valutazione finora
- Manila Convention or STCW 2010Documento8 pagineManila Convention or STCW 2010Nyan Min HtetNessuna valutazione finora
- Toshiba Servo BS Genel KatalogDocumento32 pagineToshiba Servo BS Genel Katalogluis rubioNessuna valutazione finora
- 15PPM Bilge Alarm (Gba-155) Manual (Rev5)Documento16 pagine15PPM Bilge Alarm (Gba-155) Manual (Rev5)Raúl Oscar Ledesma100% (1)
- 23 Instrumentation and AutomationDocumento42 pagine23 Instrumentation and AutomationAdrianzzzzNessuna valutazione finora
- Control and MonitoringDocumento2 pagineControl and MonitoringNebojsa Kristof0% (1)
- Annual Inspection and Calibration ChecklistDocumento5 pagineAnnual Inspection and Calibration ChecklistCleverson SchmidtNessuna valutazione finora
- Drew Marine S PDFDocumento7 pagineDrew Marine S PDFRohit RajNessuna valutazione finora
- Bar Graphic Type Digital Indicator ManualDocumento10 pagineBar Graphic Type Digital Indicator Manualjamukanak padNessuna valutazione finora
- OdmcsDocumento6 pagineOdmcsram_sharma_7Nessuna valutazione finora
- Asafesystem EgbDocumento58 pagineAsafesystem EgbpmmeeranNessuna valutazione finora
- Wartsila O IG Moss Inert Gas Generator For Tankers PDFDocumento4 pagineWartsila O IG Moss Inert Gas Generator For Tankers PDFvcharlesNessuna valutazione finora
- UmsDocumento0 pagineUmsrolley5909Nessuna valutazione finora
- XChangeDocumento17 pagineXChangeGeileanu Catalin100% (1)
- DS Test and Calibration EquipmentDocumento7 pagineDS Test and Calibration Equipmentjirafabg123Nessuna valutazione finora
- Downloaded From Manuals Search EngineDocumento220 pagineDownloaded From Manuals Search EnginenzmrsNessuna valutazione finora
- UTImeter - HoneywellDocumento6 pagineUTImeter - HoneywellJuanjo MarengoNessuna valutazione finora
- Step-by-step guide to operating and understanding ODMEDocumento21 pagineStep-by-step guide to operating and understanding ODMEKunal Singh100% (2)
- Enhanced Survey ProgrammeDocumento14 pagineEnhanced Survey ProgrammeleopradeepNessuna valutazione finora
- K Chief FolderDocumento4 pagineK Chief FolderCaptive MahbubNessuna valutazione finora
- U-Tank Stabilization SystemDocumento4 pagineU-Tank Stabilization SystemBurduja IonNessuna valutazione finora
- Autro Safe Bs310 Commissioning - Handbook - Key1c6Documento52 pagineAutro Safe Bs310 Commissioning - Handbook - Key1c6Mohamed MeeranNessuna valutazione finora
- SDC35/36 User's Manual: Single Loop ControllerDocumento288 pagineSDC35/36 User's Manual: Single Loop ControllerAlex Horia0% (1)
- 15 PPM Bilge AlarmDocumento9 pagine15 PPM Bilge AlarmIgnacio SantanaNessuna valutazione finora
- 3 ORB Cheat Sheet Mar 2017 RedDocumento20 pagine3 ORB Cheat Sheet Mar 2017 RedAntonNessuna valutazione finora
- Engine Room Simulator Automation & Control GuideDocumento34 pagineEngine Room Simulator Automation & Control Guider0x0rNessuna valutazione finora
- Steam Generators (Boilers) CLASE ADocumento26 pagineSteam Generators (Boilers) CLASE AMiguel Angel ManNessuna valutazione finora
- Abb 2600TDocumento80 pagineAbb 2600TAbdullah MuhammadNessuna valutazione finora
- Deck SealDocumento7 pagineDeck SealAlamin Siddique100% (1)
- 91210-001100 CS4000 Serv & Maint E1 04 1 EDocumento24 pagine91210-001100 CS4000 Serv & Maint E1 04 1 EAlexDorNessuna valutazione finora
- Master Air Starting Valve ExploredDocumento13 pagineMaster Air Starting Valve Exploredavm4343100% (1)
- HJ Mechtronic SystemDocumento4 pagineHJ Mechtronic SystemSteve BoteNessuna valutazione finora
- Engine Monitoring SystemsDocumento7 pagineEngine Monitoring SystemsMustafa100% (1)
- Marex OS III CatalogDocumento88 pagineMarex OS III CatalogVALCICLEINessuna valutazione finora
- Embedded Systems Training & Skills Development ProgramDocumento61 pagineEmbedded Systems Training & Skills Development ProgramAmit BansalNessuna valutazione finora
- Autronica Gas Detector HC 600Documento50 pagineAutronica Gas Detector HC 600Sotila Ionut100% (1)
- Fieldbus Systems and Their Applications 2005: A Proceedings volume from the 6th IFAC International Conference, Puebla, Mexico 14-25 November 2005Da EverandFieldbus Systems and Their Applications 2005: A Proceedings volume from the 6th IFAC International Conference, Puebla, Mexico 14-25 November 2005Miguel Leon ChavezNessuna valutazione finora
- Exp - P9 - Pressure ControlDocumento9 pagineExp - P9 - Pressure ControlPriyanshu LilhaNessuna valutazione finora
- Overview of Microbiological AttackDocumento10 pagineOverview of Microbiological AttackJitendra KumarNessuna valutazione finora
- Oxygen AnalysersDocumento2 pagineOxygen AnalysersJitendra KumarNessuna valutazione finora
- Pilgrim NutDocumento2 paginePilgrim NutJitendra KumarNessuna valutazione finora
- Brochure o Pumps Deepwell Gas CarriersDocumento4 pagineBrochure o Pumps Deepwell Gas CarriersJohn MarxisNessuna valutazione finora
- Overall Arrangement: Description of The Salient PartsDocumento6 pagineOverall Arrangement: Description of The Salient PartsJitendra KumarNessuna valutazione finora
- Microbes of Microbiological Attac1Documento3 pagineMicrobes of Microbiological Attac1Jitendra KumarNessuna valutazione finora
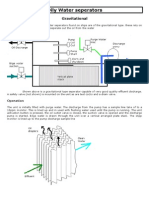
- Oily Water SeperatorsDocumento2 pagineOily Water SeperatorsJitendra KumarNessuna valutazione finora
- Oil WhirlDocumento2 pagineOil WhirlJitendra KumarNessuna valutazione finora
- Motor Ship Steam Plan1Documento3 pagineMotor Ship Steam Plan1Jitendra KumarNessuna valutazione finora
- Parallel Operation of GeneratorsDocumento5 pagineParallel Operation of GeneratorsJitendra KumarNessuna valutazione finora
- Oil Distribution and Factors in Journal BearingsDocumento2 pagineOil Distribution and Factors in Journal BearingsAnkit DedhiyaNessuna valutazione finora
- Operation of A Centrifugal Oil PurifersDocumento3 pagineOperation of A Centrifugal Oil PurifersJitendra KumarNessuna valutazione finora
- Increasing Propulsive EfficiencyDocumento6 pagineIncreasing Propulsive EfficiencyJitendra KumarNessuna valutazione finora
- Navigation LightingDocumento1 paginaNavigation LightingJitendra KumarNessuna valutazione finora
- Motor Ship Steam Plant ControlDocumento1 paginaMotor Ship Steam Plant ControlJitendra KumarNessuna valutazione finora
- Marpol 73Documento12 pagineMarpol 73Jitendra KumarNessuna valutazione finora
- Low Sulphur FuelsDocumento1 paginaLow Sulphur FuelsJitendra KumarNessuna valutazione finora
- Molybdenum DiSulphideDocumento1 paginaMolybdenum DiSulphideJitendra KumarNessuna valutazione finora
- Microbes of Microbiological Attac1Documento3 pagineMicrobes of Microbiological Attac1Jitendra KumarNessuna valutazione finora
- Metallurgical TestingDocumento1 paginaMetallurgical TestingJitendra KumarNessuna valutazione finora
- Tooth Design: Forces Acting On Spur GearsDocumento77 pagineTooth Design: Forces Acting On Spur GearsJitendra KumarNessuna valutazione finora
- Lube Oil Requirements For Diesel EnginesDocumento3 pagineLube Oil Requirements For Diesel EnginesJitendra KumarNessuna valutazione finora
- Lifting Using Accessories: Calculation of LoadDocumento2 pagineLifting Using Accessories: Calculation of LoadJitendra KumarNessuna valutazione finora
- Materials Used in Ships Sea Water SystemsDocumento1 paginaMaterials Used in Ships Sea Water SystemsAnkit DedhiyaNessuna valutazione finora
- Mechanical GovernorsDocumento1 paginaMechanical GovernorsJitendra KumarNessuna valutazione finora
- LNG Containment DesignsDocumento3 pagineLNG Containment DesignsJitendra KumarNessuna valutazione finora
- LNG Reliquifactio1Documento1 paginaLNG Reliquifactio1Jitendra KumarNessuna valutazione finora
- Liquified Gas CargoesDocumento2 pagineLiquified Gas CargoesJitendra KumarNessuna valutazione finora
- Jacket Water SystemDocumento2 pagineJacket Water SystemJitendra KumarNessuna valutazione finora
- (Hawley) - The Practice of Silviculture (1946)Documento380 pagine(Hawley) - The Practice of Silviculture (1946)Karpincho30% (1)
- Aneka Cloud IntroductionDocumento36 pagineAneka Cloud IntroductionPradeep Kumar Reddy ReddyNessuna valutazione finora
- GMP SIMATIC WinCC V15 en en-US PDFDocumento216 pagineGMP SIMATIC WinCC V15 en en-US PDFsybaritzNessuna valutazione finora
- SaaS Marketing Automation Playbook TeaserDocumento19 pagineSaaS Marketing Automation Playbook TeaserValery FenskeNessuna valutazione finora
- Decision Wise Whitepaper 3 Essential Components of Employee EngagemenDocumento8 pagineDecision Wise Whitepaper 3 Essential Components of Employee EngagemenRatna Srinivas Kosuri100% (1)
- FY2010 DSM-IV-TR Summary: Division of Juvenile Justice State of Alaska, DHSSDocumento15 pagineFY2010 DSM-IV-TR Summary: Division of Juvenile Justice State of Alaska, DHSSGnostic43Nessuna valutazione finora
- TPB QuestionnaireDocumento9 pagineTPB QuestionnaireAhmad FazullahNessuna valutazione finora
- LZW Fundamentals: Lempel Ziv 1977 1978 Terry Welch's 1978 Algorithm 1984Documento9 pagineLZW Fundamentals: Lempel Ziv 1977 1978 Terry Welch's 1978 Algorithm 1984Vishal PatilNessuna valutazione finora
- USA Mathematical Talent Search Solutions To Problem 5/4/18Documento3 pagineUSA Mathematical Talent Search Solutions To Problem 5/4/18สฮาบูดีน สาและNessuna valutazione finora
- Resume SasDocumento3 pagineResume Saslubasoft0% (1)
- Milankovitch Cycles - Earth ClimateDocumento11 pagineMilankovitch Cycles - Earth ClimateJohn MarkakisNessuna valutazione finora
- Persuasive Writing G7Documento18 paginePersuasive Writing G7Shorouk KaramNessuna valutazione finora
- Commodi Cation of Women's Bodies andDocumento9 pagineCommodi Cation of Women's Bodies andunesa fikNessuna valutazione finora
- The Sevenfold Seeking and Noesis of The Hebdomian WayDocumento15 pagineThe Sevenfold Seeking and Noesis of The Hebdomian WayDark Japer100% (1)
- Five Necessairy Condition For Project SuccessDocumento2 pagineFive Necessairy Condition For Project SuccessSimeon Petos100% (1)
- Design and Fabrication of Electric BikeDocumento47 pagineDesign and Fabrication of Electric BikeHarish Dangeti100% (1)
- TANCET Model Question Paper For Me EEE PDFDocumento51 pagineTANCET Model Question Paper For Me EEE PDFsree ramNessuna valutazione finora
- Chapter 14 Speaking To PersuadeDocumento6 pagineChapter 14 Speaking To PersuadeAtiqah NadirahNessuna valutazione finora
- Annals of Medicine and Surgery: Bliss J. ChangDocumento2 pagineAnnals of Medicine and Surgery: Bliss J. ChangroromutiaraNessuna valutazione finora
- Total Productive MaintenanceDocumento41 pagineTotal Productive Maintenancejeff090288Nessuna valutazione finora
- Project Proposal VTP 4Documento35 pagineProject Proposal VTP 4api-245643527Nessuna valutazione finora
- 11-1203 Syed Hussain HaiderDocumento16 pagine11-1203 Syed Hussain HaiderSalman Nisar BhattiNessuna valutazione finora
- What's in The Light: Bel Air Family Investment Awarded Silver Spoon AwardDocumento14 pagineWhat's in The Light: Bel Air Family Investment Awarded Silver Spoon AwardlrbrennanNessuna valutazione finora
- BT 203 Basic Mechanical Engineering May 2019 PDFDocumento2 pagineBT 203 Basic Mechanical Engineering May 2019 PDFKunta PatleNessuna valutazione finora
- TCS NotesDocumento10 pagineTCS Notesdhana sethupathyNessuna valutazione finora
- African American Women's LanguageDocumento30 pagineAfrican American Women's LanguageRatih Santi MianawatiNessuna valutazione finora
- IDAS Demonstration Setup Guide F3100D-F5120D PDFDocumento146 pagineIDAS Demonstration Setup Guide F3100D-F5120D PDFTopcom Toki-Voki100% (2)
- Syl LB Hms 240809Documento102 pagineSyl LB Hms 240809sharma_anand73Nessuna valutazione finora
- FormworksDocumento94 pagineFormworksLouie Zavalla LeyvaNessuna valutazione finora