Potrebbero piacerti anche
- DI2 Examenes TODO Años AnterioresDocumento755 pagineDI2 Examenes TODO Años AnterioresToni DiesNessuna valutazione finora
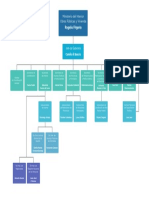
- Organigrama Ministerio Del Interior 1 - ARGENTINADocumento1 paginaOrganigrama Ministerio Del Interior 1 - ARGENTINAdaniel muñozNessuna valutazione finora
- ValorizacionDocumento15 pagineValorizacionANDRES GUZMAN BARRANTESNessuna valutazione finora
- Clase #41 Lenguaje SextoDocumento16 pagineClase #41 Lenguaje Sextokaren deviaNessuna valutazione finora
- Principio de OrganizaciónDocumento4 paginePrincipio de OrganizaciónMichelle CamayoNessuna valutazione finora
- Audiencia 09 Abril 2008Documento36 pagineAudiencia 09 Abril 2008Juan Sebastian Pererira RicoNessuna valutazione finora
- S5 - 4.plantilla de Comentario de HidrogramaDocumento14 pagineS5 - 4.plantilla de Comentario de HidrogramaAzuNessuna valutazione finora
- Simulacion en Simio PlanificacionDocumento13 pagineSimulacion en Simio PlanificacionIprsttlang SegundoNessuna valutazione finora
- Guia de Resist MatDocumento9 pagineGuia de Resist MatAlvaro Muruchi Rojas100% (1)
- NTP-1068 2016 Vibraciones Alternativas para Evaluar El RiesgoDocumento6 pagineNTP-1068 2016 Vibraciones Alternativas para Evaluar El RiesgoAnonymous IbHP1NYNessuna valutazione finora
- Calendario Mexico 2023 05Documento1 paginaCalendario Mexico 2023 05Diana OrtegaNessuna valutazione finora
- 12edith LitwinDocumento3 pagine12edith LitwinMaria Marcela MenardNessuna valutazione finora
- Cuadro Comparativo-Pedagogias EmergentesDocumento4 pagineCuadro Comparativo-Pedagogias EmergentesÁngel Antonio Sanchez EcheverriaNessuna valutazione finora
- Actividad 3 - 100 Cosas Antes de MorirDocumento5 pagineActividad 3 - 100 Cosas Antes de MorirKenia Abigail BussónNessuna valutazione finora
- Cortadora de FiambresDocumento3 pagineCortadora de Fiambressimone2miller49Nessuna valutazione finora
- Tabla ConcentraciónDocumento4 pagineTabla Concentraciónisaacineztroza86Nessuna valutazione finora
- Tema 14.la Improvisación en El Lenguaje MusicalDocumento26 pagineTema 14.la Improvisación en El Lenguaje MusicalMarta FernándezNessuna valutazione finora
- FICHERODocumento36 pagineFICHEROMerit ZenilNessuna valutazione finora
- Silabo Biofisica EstomatologicaDocumento6 pagineSilabo Biofisica EstomatologicaJuan Augusto Fernández TarazonaNessuna valutazione finora
- Enfermedades Infecciosas Con Repercusión NeonatalDocumento3 pagineEnfermedades Infecciosas Con Repercusión Neonataljesus aguirreNessuna valutazione finora
- Temas SeleccionadosDocumento45 pagineTemas Seleccionadosherranarte100% (1)
- Estadistica 2Documento4 pagineEstadistica 2Noel QuirozNessuna valutazione finora
- Grupo04 Paso2 Teorico Frank HerreraDocumento12 pagineGrupo04 Paso2 Teorico Frank HerreraJose AffleckNessuna valutazione finora
- Laboratorio N 2Documento11 pagineLaboratorio N 2Gladys YucraNessuna valutazione finora
- Producto Académico 02Documento4 pagineProducto Académico 02ROSAURA CLAUDINA BAUTISTA CIRIACO0% (1)
- Elastic I DadDocumento30 pagineElastic I DadJEFFERSON DAITON GOMEZ SHUPINGAHUANessuna valutazione finora
- Programacion de Llaves ToyotaDocumento30 pagineProgramacion de Llaves ToyotaServicio Integral del EsteNessuna valutazione finora
- Primer Exanen Conformado de Metales 2013 - 2Documento9 paginePrimer Exanen Conformado de Metales 2013 - 2Micky UltNessuna valutazione finora
- Sencamer Textil y CalzadoDocumento2 pagineSencamer Textil y Calzadokike roca100% (1)
- Combustión Alcohol EtílicoDocumento7 pagineCombustión Alcohol EtílicoOoscaar Daaviid Yaaneez LaaraaNessuna valutazione finora