Potrebbero piacerti anche
- Improved Design and Evaluation of Electrical Earthing Systems For Maryland 13233 KV Transmission StationDocumento9 pagineImproved Design and Evaluation of Electrical Earthing Systems For Maryland 13233 KV Transmission StationInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Substation Grounding Training ManualDocumento22 pagineSubstation Grounding Training ManualWilheim Janssen GoNessuna valutazione finora
- Grounding EarthingDocumento5 pagineGrounding EarthingNuri BerishaNessuna valutazione finora
- Earthing CalculationDocumento250 pagineEarthing CalculationJeremy HensleyNessuna valutazione finora
- IEEE Design and Optimize Subs Grounding Grid MatlabDocumento7 pagineIEEE Design and Optimize Subs Grounding Grid MatlabKesavanNessuna valutazione finora
- Modern Approach To Earthing System Design and Its AnalysisDocumento7 pagineModern Approach To Earthing System Design and Its AnalysisDoly DamanikNessuna valutazione finora
- 66kv Earthing System R-1 (For Print Out)Documento8 pagine66kv Earthing System R-1 (For Print Out)g_nraja100% (1)
- Quick Guide On CDEGS CRDocumento28 pagineQuick Guide On CDEGS CRrian0201100% (1)
- Grounding System For High Resistivity Limited Area Substations in Hilly Region of Himachal PradeshDocumento7 pagineGrounding System For High Resistivity Limited Area Substations in Hilly Region of Himachal Pradeshostojic007Nessuna valutazione finora
- Earthing Ieee80-Pmu GambangDocumento10 pagineEarthing Ieee80-Pmu GambangMohamad HishamNessuna valutazione finora
- Earthmat Calculations For WTG HT YardDocumento3 pagineEarthmat Calculations For WTG HT YardSanthosh KumarNessuna valutazione finora
- SS Earthing Mat Design 22 8 12Documento7 pagineSS Earthing Mat Design 22 8 12Vishal ThakurNessuna valutazione finora
- Substation Earthing by JGNDocumento49 pagineSubstation Earthing by JGNrupamNessuna valutazione finora
- Effect of High Resistive Barrier On Earthing System: Abstract: Substation Earthing Provides A LowDocumento4 pagineEffect of High Resistive Barrier On Earthing System: Abstract: Substation Earthing Provides A Lowalcie_scribdNessuna valutazione finora
- 1 Earth Testing 2010Documento68 pagine1 Earth Testing 2010Ramy DiabNessuna valutazione finora
- Earthing DesignDocumento40 pagineEarthing DesignSanjeev Kumar100% (1)
- EARTHING DESIGN CALCULATIONDocumento10 pagineEARTHING DESIGN CALCULATIONarafinNessuna valutazione finora
- Measurement of Earth ResistanceDocumento34 pagineMeasurement of Earth ResistanceYousefHassanNessuna valutazione finora
- Grounding Bonding For Substation CommunicationsDocumento54 pagineGrounding Bonding For Substation CommunicationsAlbieNessuna valutazione finora
- Power Systems Study Specifications XXXDocumento8 paginePower Systems Study Specifications XXXharmlesdragonNessuna valutazione finora
- BSF Earthing System Calculation 1Documento29 pagineBSF Earthing System Calculation 1Veerasamy KarikalvalavanNessuna valutazione finora
- Earthing Calculation - Grid (Exm)Documento33 pagineEarthing Calculation - Grid (Exm)balaeee123Nessuna valutazione finora
- Assessment of Soil Resistivity On Grounding of Electrical Systems: A Case Study of North-East Zone, NigeriaDocumento10 pagineAssessment of Soil Resistivity On Grounding of Electrical Systems: A Case Study of North-East Zone, NigeriaJornal of Academic and Applied StudiesNessuna valutazione finora
- To Check The Reliability of Different Power Sources and Bus Bar Schemes Using EtapDocumento83 pagineTo Check The Reliability of Different Power Sources and Bus Bar Schemes Using EtapMuhammad MudassarNessuna valutazione finora
- Substation GroundingDocumento19 pagineSubstation GroundingDev SwainNessuna valutazione finora
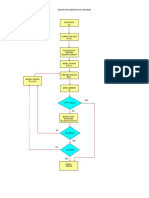
- Design procedure block diagram earth calculationDocumento10 pagineDesign procedure block diagram earth calculationWaleed BASALAMANessuna valutazione finora
- 02 Earthing SystemsDocumento113 pagine02 Earthing Systemsagent42505100% (1)
- IEEE 1850 GroundGridCalcsDocumento11 pagineIEEE 1850 GroundGridCalcsaabts1413Nessuna valutazione finora
- System Neutral EarthingDocumento70 pagineSystem Neutral Earthingsorry2qazNessuna valutazione finora
- Chapter 17 - NT PWC SDM Substation Layouts and Facilities - Outdoor Section Rev 2 - 17-1-2012Documento12 pagineChapter 17 - NT PWC SDM Substation Layouts and Facilities - Outdoor Section Rev 2 - 17-1-2012Punit RatnaniNessuna valutazione finora
- Determining Cross Section Area of The Protective ConductorDocumento4 pagineDetermining Cross Section Area of The Protective ConductorS Amila C RajapaksaNessuna valutazione finora
- Lightning Protection in SubstationsDocumento31 pagineLightning Protection in Substationsvikasrajput198971% (7)
- System earthing methods comparisonDocumento14 pagineSystem earthing methods comparisonsubhranil157Nessuna valutazione finora
- Presentation On Insulation CoordinationDocumento17 paginePresentation On Insulation CoordinationBhavik PrajapatiNessuna valutazione finora
- Is 2309 1989Documento72 pagineIs 2309 1989Jagdish PalariyaNessuna valutazione finora
- Selecting Arrester MCOV-UcDocumento9 pagineSelecting Arrester MCOV-Ucjose GonzalezNessuna valutazione finora
- Quick Guide On Cdegs CRDocumento28 pagineQuick Guide On Cdegs CRGilberto MejíaNessuna valutazione finora
- Building Arrangement Iec61936-2002Documento5 pagineBuilding Arrangement Iec61936-2002Cinar InalNessuna valutazione finora
- Grounding electrical systems safetyDocumento3 pagineGrounding electrical systems safetyMiko Quijano100% (1)
- Underground Duct Banks and Raceways - Electrical Design GuideDocumento2 pagineUnderground Duct Banks and Raceways - Electrical Design GuideDaniel BolivarNessuna valutazione finora
- Ect129 Uninterruptible Static Power Supplies and The Protection of PersonsDocumento44 pagineEct129 Uninterruptible Static Power Supplies and The Protection of PersonsMarko VujicaNessuna valutazione finora
- Direct Stroke Lightning Protection Calculation For 110Kv Switchyard by Lighting Mast ReferenceDocumento11 pagineDirect Stroke Lightning Protection Calculation For 110Kv Switchyard by Lighting Mast ReferenceneerajNessuna valutazione finora
- Earthing SystemDocumento22 pagineEarthing Systemashokparikh100% (2)
- Knowledge is "Real Power": Introduction to Power QualityDa EverandKnowledge is "Real Power": Introduction to Power QualityNessuna valutazione finora
- Design of Earthing System For A Substation: A Case StudyDocumento6 pagineDesign of Earthing System For A Substation: A Case StudyHimanshu RanjanNessuna valutazione finora
- EE161027 (Assignment#02)Documento10 pagineEE161027 (Assignment#02)candylandkefantyNessuna valutazione finora
- Grounding - Earthing - Grounding Grid Study GuideDocumento11 pagineGrounding - Earthing - Grounding Grid Study GuideSridharan Priyadharsen100% (1)
- ## Etap Earth Sample PDFDocumento5 pagine## Etap Earth Sample PDFdcf67myNessuna valutazione finora
- Design of Earthing System For HVDocumento22 pagineDesign of Earthing System For HVAshwani Dogra100% (1)
- Earth MatDocumento6 pagineEarth MatSmitha PatelNessuna valutazione finora
- Grounding Design Using Optimization MethodDocumento12 pagineGrounding Design Using Optimization MethodharyhaysNessuna valutazione finora
- Substation Earthing Design: Akshay PatilDocumento6 pagineSubstation Earthing Design: Akshay PatilSunil SinghNessuna valutazione finora
- E1 PDFDocumento14 pagineE1 PDFSunilNessuna valutazione finora
- Design of Earthing SystemDocumento5 pagineDesign of Earthing SystemNishant SinhaNessuna valutazione finora
- CYMGRD Optimal Design of Substation Grounding GridsDocumento5 pagineCYMGRD Optimal Design of Substation Grounding Gridsjaneth lozanoNessuna valutazione finora
- Keywords Earthing Designs Substation Earthing Resistance Grid Potential Rise Mesh Voltage Step Voltage and Matlab Figures - CompressDocumento6 pagineKeywords Earthing Designs Substation Earthing Resistance Grid Potential Rise Mesh Voltage Step Voltage and Matlab Figures - CompressDebasish RahaNessuna valutazione finora
- Vol4no2 2 PDFDocumento8 pagineVol4no2 2 PDFyasser awwadNessuna valutazione finora
- Cyme GridDocumento6 pagineCyme Gridprabhakaran_hdec100% (1)
- Grounding: Egbodor Peter UwhubetineDocumento18 pagineGrounding: Egbodor Peter UwhubetineEgbodor Peter100% (1)
- Solution Manual for 100 Genesys Design Examples: Second EditionDa EverandSolution Manual for 100 Genesys Design Examples: Second EditionNessuna valutazione finora
- New Microsoft Word DocumentDocumento2 pagineNew Microsoft Word DocumentjpsridharNessuna valutazione finora
- SubjectsAnalog CircuitsDocumento4 pagineSubjectsAnalog CircuitsjpsridharNessuna valutazione finora
- SJB Institute of Technology: Department of Electrical & Electronics EngineeringDocumento1 paginaSJB Institute of Technology: Department of Electrical & Electronics EngineeringjpsridharNessuna valutazione finora
- Contents PDFDocumento9 pagineContents PDFjayashreeNessuna valutazione finora
- SJB Institute of Technology: Department of Electrical & Electronics EngineeringDocumento1 paginaSJB Institute of Technology: Department of Electrical & Electronics EngineeringjpsridharNessuna valutazione finora
- Ch-3 ElectrolysisDocumento6 pagineCh-3 ElectrolysisjpsridharNessuna valutazione finora
- SJB Institute of Technology: Department of Electrical & Electronics EngineeringDocumento1 paginaSJB Institute of Technology: Department of Electrical & Electronics EngineeringjpsridharNessuna valutazione finora
- DC MACHINES TESTDocumento1 paginaDC MACHINES TESTjpsridharNessuna valutazione finora
- SJB Institute of Technology: Department of Electrical & Electronics EngineeringDocumento1 paginaSJB Institute of Technology: Department of Electrical & Electronics EngineeringjpsridharNessuna valutazione finora
- Res Test III 15ee563Documento1 paginaRes Test III 15ee563jpsridharNessuna valutazione finora
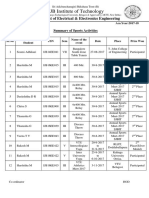
- Updated Sports Actvities 2017-18Documento5 pagineUpdated Sports Actvities 2017-18jpsridharNessuna valutazione finora
- Res Test III 15ee563Documento1 paginaRes Test III 15ee563jpsridharNessuna valutazione finora
- Ch-3 ElectrolysisDocumento6 pagineCh-3 ElectrolysisjpsridharNessuna valutazione finora
- Ch-3 ElectrolysisDocumento6 pagineCh-3 ElectrolysisjpsridharNessuna valutazione finora
- P.HD Course Work SyllabusDocumento2 pagineP.HD Course Work SyllabusjpsridharNessuna valutazione finora
- Upqc Block DiagramDocumento3 pagineUpqc Block DiagramjpsridharNessuna valutazione finora
- Basic Electrical Engineering10ELE25Documento78 pagineBasic Electrical Engineering10ELE25jpsridharNessuna valutazione finora
- Title of The Paper (24 Font) : Name of The Author, Name of The Author, Name of The Author (12 Font)Documento1 paginaTitle of The Paper (24 Font) : Name of The Author, Name of The Author, Name of The Author (12 Font)jpsridharNessuna valutazione finora
- Power QualityDocumento218 paginePower QualityjpsridharNessuna valutazione finora
- Viva QuestionsDocumento16 pagineViva Questionsjpsridhar100% (1)
- Ies 2013Documento4 pagineIes 2013jpsridharNessuna valutazione finora
- Paper On IMDocumento5 paginePaper On IMjpsridharNessuna valutazione finora
- Certificate VtuDocumento1 paginaCertificate VtujpsridharNessuna valutazione finora
- Rules and RegulationsDocumento2 pagineRules and RegulationsjpsridharNessuna valutazione finora
- IES ESE 2012 Solution Ee Paper2Documento2 pagineIES ESE 2012 Solution Ee Paper2jpsridharNessuna valutazione finora
- Substation EarthingDocumento6 pagineSubstation Earthingjpsridhar100% (1)
- Conv Elect I PDFDocumento12 pagineConv Elect I PDFsuperkan619Nessuna valutazione finora
- Mini ProjectDocumento2 pagineMini ProjectjpsridharNessuna valutazione finora
- Applications of DSPDocumento6 pagineApplications of DSPjpsridharNessuna valutazione finora
- Workshop Shedule Foe CommunicationDocumento1 paginaWorkshop Shedule Foe CommunicationjpsridharNessuna valutazione finora