Potrebbero piacerti anche
- The Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementDa EverandThe Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementNessuna valutazione finora
- How Unbalance Affects Bearing LifeDocumento8 pagineHow Unbalance Affects Bearing Lifeagrocel_bhv5591Nessuna valutazione finora
- Air CoolersDocumento18 pagineAir CoolersPRATIK P. BHOIRNessuna valutazione finora
- Structural Health MonitoringDa EverandStructural Health MonitoringDaniel BalageasNessuna valutazione finora
- Flyer Rolling Bearing AnalysisDocumento4 pagineFlyer Rolling Bearing AnalysisBikash Ranjan SahooNessuna valutazione finora
- Metal Valves & Pipe Fittings World Summary: Market Values & Financials by CountryDa EverandMetal Valves & Pipe Fittings World Summary: Market Values & Financials by CountryNessuna valutazione finora
- Some Syntactical Patterns of Northern Sotho IdiomsDocumento63 pagineSome Syntactical Patterns of Northern Sotho IdiomsKTmanners Oheltak MakhalemeleNessuna valutazione finora
- Material Used As Per Chinese StandardsDocumento2 pagineMaterial Used As Per Chinese StandardsHakim 'n BilalNessuna valutazione finora
- Proceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987Da EverandProceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987W. R. TysonNessuna valutazione finora
- How Long Will A Bearing Last? Standardized Life Equations Help To AnswerDocumento3 pagineHow Long Will A Bearing Last? Standardized Life Equations Help To AnswervijaykhandgeNessuna valutazione finora
- Expension Joints Engineering AppliancesDocumento30 pagineExpension Joints Engineering AppliancesAcid BurnsNessuna valutazione finora
- Thep Nhat-Han For DesignDocumento10 pagineThep Nhat-Han For DesignNhuVan NguyenNessuna valutazione finora
- The Function and Mechanism of Conveyor Pulley DrumsDocumento15 pagineThe Function and Mechanism of Conveyor Pulley DrumsKroya HunNessuna valutazione finora
- SMP Multi Rifled TubesDocumento12 pagineSMP Multi Rifled TubesDiego Martínez FernándezNessuna valutazione finora
- Friction Torque of A Rotary Shaft Lip SealDocumento5 pagineFriction Torque of A Rotary Shaft Lip Sealmans2014Nessuna valutazione finora
- Active RecreationDocumento10 pagineActive RecreationHuggo OttersNessuna valutazione finora
- Data Sheet Carbon SteelsDocumento17 pagineData Sheet Carbon SteelsvkmsNessuna valutazione finora
- 6 Ways To Unlimited HealthDocumento18 pagine6 Ways To Unlimited HealthdebanikgNessuna valutazione finora
- The Effect of Unbalance On Bearing LifeDocumento8 pagineThe Effect of Unbalance On Bearing LifejaypallaNessuna valutazione finora
- Warning PDFDocumento1 paginaWarning PDFPartsGopher.com100% (1)
- Glasswool Spec PDFDocumento3 pagineGlasswool Spec PDFabhishek198327Nessuna valutazione finora
- ABB CatalogueDocumento6 pagineABB CatalogueNavneet SinghNessuna valutazione finora
- Keyless BushingsDocumento52 pagineKeyless BushingsgorgonoidemarcoNessuna valutazione finora
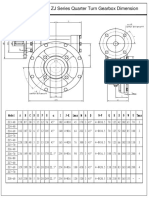
- Greatork-ZJ Series Gearbox DimensionDocumento3 pagineGreatork-ZJ Series Gearbox DimensionCan PoonsawatNessuna valutazione finora
- Types of BearingsDocumento7 pagineTypes of BearingsSameed YounusNessuna valutazione finora
- Failure Analysis of Sheared Shaft of A Brine Recycle Pump...Documento12 pagineFailure Analysis of Sheared Shaft of A Brine Recycle Pump...Pd RarNessuna valutazione finora
- 03-Bearing Life PDFDocumento34 pagine03-Bearing Life PDFchanayireNessuna valutazione finora
- Hydraulic SealsDocumento19 pagineHydraulic SealsVenkatesh VenkyNessuna valutazione finora
- Lesson 14 Idlers and PulleysDocumento53 pagineLesson 14 Idlers and PulleysSuperior Industries100% (1)
- Erection & Installation ProcedureDocumento3 pagineErection & Installation ProcedureForos IscNessuna valutazione finora
- UNIT 2: Active Recreation (Fitness)Documento16 pagineUNIT 2: Active Recreation (Fitness)Ranzel AlvarezNessuna valutazione finora
- Torque AssignmentDocumento13 pagineTorque AssignmentMostafa Ahmed ZeinNessuna valutazione finora
- Metric Thread - Extended Thread Size RangeDocumento19 pagineMetric Thread - Extended Thread Size RangeNatashaAggarwalNessuna valutazione finora
- Kwsengineering PDFDocumento126 pagineKwsengineering PDFargaNessuna valutazione finora
- AISI Designation: Stainless Tool Steels Killed Carbon SteelsDocumento14 pagineAISI Designation: Stainless Tool Steels Killed Carbon SteelsShankar JhaNessuna valutazione finora
- Flow Properties and Design Procedures For Coal Storage Bins PDFDocumento401 pagineFlow Properties and Design Procedures For Coal Storage Bins PDFEmaVanni100% (2)
- Mechanical Engineeering Machine ElementsDocumento25 pagineMechanical Engineeering Machine ElementsHüseyinYılmazNessuna valutazione finora
- Sae 6000 Psi PDFDocumento41 pagineSae 6000 Psi PDFcardozoedmNessuna valutazione finora
- Requisition: FOR Hot Kiln Alignment & Girth Gear InspectionDocumento5 pagineRequisition: FOR Hot Kiln Alignment & Girth Gear InspectionAhmad Husni RizalNessuna valutazione finora
- Belt Tear Detector.20160126Documento4 pagineBelt Tear Detector.20160126MikiNessuna valutazione finora
- Fan Efficiency ArticlesDocumento12 pagineFan Efficiency ArticlesRami GhanemNessuna valutazione finora
- Kluberfluid C F 3 UltraDocumento2 pagineKluberfluid C F 3 UltraSathykumar MurugesanNessuna valutazione finora
- Medium Pressure RangeDocumento122 pagineMedium Pressure Rangexuanphuong2710Nessuna valutazione finora
- The Active Magnetic BearingDocumento6 pagineThe Active Magnetic BearingdhudhiNessuna valutazione finora
- Intergard 345 - DatasheetDocumento4 pagineIntergard 345 - DatasheetmanuthomasNessuna valutazione finora
- Spraying SystemDocumento8 pagineSpraying SystemRaul FidalgoNessuna valutazione finora
- 05rotary Shaft Seals PDFDocumento13 pagine05rotary Shaft Seals PDFKhanh Pham DangNessuna valutazione finora
- Kalpraxis Cement Plants PDFDocumento14 pagineKalpraxis Cement Plants PDFalbertbunguriNessuna valutazione finora
- Vautid 100Documento4 pagineVautid 100emad sabriNessuna valutazione finora
- Stainless Steel 316Documento1 paginaStainless Steel 316Bungsu ZamzamNessuna valutazione finora
- Lloyd S Register Sec. III 2015 Edition OverviewDocumento23 pagineLloyd S Register Sec. III 2015 Edition OverviewYoshua PortugalNessuna valutazione finora
- RBC FGDocumento18 pagineRBC FGdragon_ecuNessuna valutazione finora
- Tyre Coupling CatalogDocumento9 pagineTyre Coupling CatalogKariem R NoweerNessuna valutazione finora
- Friction and Wear of Ptfe Comp at Cry TempDocumento10 pagineFriction and Wear of Ptfe Comp at Cry Tempa100acomNessuna valutazione finora
- WL 00200 6 de enDocumento200 pagineWL 00200 6 de enaNessuna valutazione finora
- Nanotech PaintingDocumento16 pagineNanotech Paintingkr_abhijeet72356587Nessuna valutazione finora
- Pulveriseren Atriton PDFDocumento8 paginePulveriseren Atriton PDFAntonNessuna valutazione finora
- Simrit - Broșura PTFE Chevron SealsDocumento10 pagineSimrit - Broșura PTFE Chevron Sealsjo_rz_57100% (1)
- Unit-I: Digital Image Fundamentals & Image TransformsDocumento70 pagineUnit-I: Digital Image Fundamentals & Image TransformsNuzhath FathimaNessuna valutazione finora
- Ashok Leyland Project ReportDocumento40 pagineAshok Leyland Project ReportGovind kumarNessuna valutazione finora
- Tsang Mui Millennium School 2019-2020 English Worksheet: Fill in The Blanks With The Correct Form of The VerbsDocumento46 pagineTsang Mui Millennium School 2019-2020 English Worksheet: Fill in The Blanks With The Correct Form of The VerbscocoyipNessuna valutazione finora
- Evaluation of Global Research Trends in The Area of Food Waste D - 2020 - Food CDocumento10 pagineEvaluation of Global Research Trends in The Area of Food Waste D - 2020 - Food CAliNessuna valutazione finora
- (WWW - Asianovel.com) - Quan Zhi Gao Shou Chapter 051 - Chapter 100Documento310 pagine(WWW - Asianovel.com) - Quan Zhi Gao Shou Chapter 051 - Chapter 100Exile0105Nessuna valutazione finora
- Appetizer Summative TestDocumento36 pagineAppetizer Summative TestArgelynPadolinaPedernalNessuna valutazione finora
- Philips Family Lamp UV CDocumento4 paginePhilips Family Lamp UV CmaterpcNessuna valutazione finora
- Gilmour Price List Till 20 DecDocumento18 pagineGilmour Price List Till 20 DecnhzaidiNessuna valutazione finora
- History of DiamondsDocumento21 pagineHistory of Diamondssilvernitrate1953Nessuna valutazione finora
- Medgroup Packet Tracer Skills Integration Challenge: - Design and Prototype The New Medgroup TopologyDocumento4 pagineMedgroup Packet Tracer Skills Integration Challenge: - Design and Prototype The New Medgroup TopologyvilanchNessuna valutazione finora
- Welrod Silenced PistolDocumento2 pagineWelrod Silenced Pistolblowmeasshole1911Nessuna valutazione finora
- Density-Based Methods: DBSCAN: Density-Based Clustering Based On Connected Regions With High DensityDocumento3 pagineDensity-Based Methods: DBSCAN: Density-Based Clustering Based On Connected Regions With High DensityKingzlynNessuna valutazione finora
- NavaDocumento2 pagineNavasaikiranNessuna valutazione finora
- SW Chapter 21 KeyDocumento9 pagineSW Chapter 21 KeykylevNessuna valutazione finora
- Smart Dust Technology Seminar ReportDocumento32 pagineSmart Dust Technology Seminar ReportSushan Upadhyay67% (3)
- Kingdom Fungi: - Characteristics of Fungi - Oomycota - Zygomycota - Ascomycota - Basidiomycota - DeuteromycotaDocumento15 pagineKingdom Fungi: - Characteristics of Fungi - Oomycota - Zygomycota - Ascomycota - Basidiomycota - DeuteromycotaLeah Rice100% (1)
- Question Paper - GIAN - 19 - ModifiedDocumento4 pagineQuestion Paper - GIAN - 19 - Modifiedsayan mukherjeeNessuna valutazione finora
- Facility Systems, Ground Support Systems, and Ground Support EquipmentDocumento97 pagineFacility Systems, Ground Support Systems, and Ground Support EquipmentSree288Nessuna valutazione finora
- Power Stations Using Locally Available Energy Sources: Lucien Y. Bronicki EditorDocumento524 paginePower Stations Using Locally Available Energy Sources: Lucien Y. Bronicki EditorAmat sapriNessuna valutazione finora
- Cot 3Documento16 pagineCot 3jaycel cynthiaNessuna valutazione finora
- Techno Enviro EconomicanalysisofintegrateddirectchemicalloopingDocumento14 pagineTechno Enviro EconomicanalysisofintegrateddirectchemicalloopingAhmad SyauqiNessuna valutazione finora
- Rolling Bearings VRMDocumento2 pagineRolling Bearings VRMRollerJonnyNessuna valutazione finora
- Dynamics Study MaterialDocumento57 pagineDynamics Study Materialanik sarkerNessuna valutazione finora
- Electrical BOQ 07.12.2021 New Boq R4 05-01-2022 Final 16.02.2022Documento92 pagineElectrical BOQ 07.12.2021 New Boq R4 05-01-2022 Final 16.02.2022Upendra ChariNessuna valutazione finora
- Toolbox Talks Working at Elevations English 1Documento1 paginaToolbox Talks Working at Elevations English 1AshpakNessuna valutazione finora
- Modern Residential Housing in UAEDocumento15 pagineModern Residential Housing in UAEBee Dan BudhachettriNessuna valutazione finora
- Air Cooler With Checking DoorDocumento2 pagineAir Cooler With Checking DoorSuraj KumarNessuna valutazione finora
- Feasibility Study of Creating Spaces For Cultural Tourism Under The Floating Market Concept at Nong Han Lake, Sakon Nakhon, ThailandDocumento5 pagineFeasibility Study of Creating Spaces For Cultural Tourism Under The Floating Market Concept at Nong Han Lake, Sakon Nakhon, ThailandInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- The Modern Day Cult: by Antonio Panebianco, Jason Devine, Will RichardsDocumento11 pagineThe Modern Day Cult: by Antonio Panebianco, Jason Devine, Will RichardsAntonio PanebiancoNessuna valutazione finora
- Reflection in SystemsDocumento1 paginaReflection in SystemsGeraldine PadillaNessuna valutazione finora
- Arizona, Utah & New Mexico: A Guide to the State & National ParksDa EverandArizona, Utah & New Mexico: A Guide to the State & National ParksValutazione: 4 su 5 stelle4/5 (1)
- Japanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensDa EverandJapanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensNessuna valutazione finora
- The Bahamas a Taste of the Islands ExcerptDa EverandThe Bahamas a Taste of the Islands ExcerptValutazione: 4 su 5 stelle4/5 (1)
- Naples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoDa EverandNaples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoValutazione: 5 su 5 stelle5/5 (1)
- South Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptDa EverandSouth Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptValutazione: 5 su 5 stelle5/5 (1)
- New York & New Jersey: A Guide to the State & National ParksDa EverandNew York & New Jersey: A Guide to the State & National ParksNessuna valutazione finora