Potrebbero piacerti anche
- Taylorism vs. FordismDocumento2 pagineTaylorism vs. FordismLiv Maloney67% (3)
- Cummins: ISX15 CM2250Documento17 pagineCummins: ISX15 CM2250haroun100% (4)
- Installation of Submarine PE PipesDocumento84 pagineInstallation of Submarine PE Pipeswaseemiqbal133100% (2)
- 6th Central Pay Commission Salary CalculatorDocumento15 pagine6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- CMP0193 SynopsisDocumento6 pagineCMP0193 Synopsissumiths32Nessuna valutazione finora
- IJSC Vol2 Iss1 253 260 2 PDFDocumento8 pagineIJSC Vol2 Iss1 253 260 2 PDFMd Mustafa KamalNessuna valutazione finora
- DC Motor Modelling and Control Using Fuzzy Logic Controller (FLC)Documento8 pagineDC Motor Modelling and Control Using Fuzzy Logic Controller (FLC)Hazar JojoNessuna valutazione finora
- Model Reference Controlled Separately Excited DC Motor: Ó Springer-Verlag London Limited 2009Documento9 pagineModel Reference Controlled Separately Excited DC Motor: Ó Springer-Verlag London Limited 2009Na ChNessuna valutazione finora
- (Journal of Electrical Engineering) A New High Speed Induction Motor Drive Based On Field Orientation and Hysteresis Current ComparisonDocumento9 pagine(Journal of Electrical Engineering) A New High Speed Induction Motor Drive Based On Field Orientation and Hysteresis Current ComparisonAugusto ThedoctorNessuna valutazione finora
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocumento5 pagineSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNessuna valutazione finora
- Embedded System Based On A Real Time Fuzzy Motor Speed ControllerDocumento11 pagineEmbedded System Based On A Real Time Fuzzy Motor Speed ControllerDavidleonardo GalindoNessuna valutazione finora
- PID Controller For A Two Quadrant Chopper Fed DC Motor DriveDocumento5 paginePID Controller For A Two Quadrant Chopper Fed DC Motor DriveSalman HabibNessuna valutazione finora
- Tesis JuanCamiloNustes Article Format Draft2Documento19 pagineTesis JuanCamiloNustes Article Format Draft2kamdem kouam ynnickNessuna valutazione finora
- Virtual Electrical Machinery Laboratory: A Fuzzy Logic Controller For Induction Motor DriveDocumento12 pagineVirtual Electrical Machinery Laboratory: A Fuzzy Logic Controller For Induction Motor DriveMohamed AllabanNessuna valutazione finora
- A Technical Seminar Report On: P.Neeharika (08B21A02B5)Documento9 pagineA Technical Seminar Report On: P.Neeharika (08B21A02B5)srinivas0276Nessuna valutazione finora
- ++field Weakening Operation With Maximum TorqueDocumento7 pagine++field Weakening Operation With Maximum TorqueGaspar RodriguezNessuna valutazione finora
- Im Cordinate Csi CNTRLDocumento11 pagineIm Cordinate Csi CNTRLsandeepbabu28Nessuna valutazione finora
- Simulation and Implementation of An Embedded Hybrid Fuzzy Trained Artificial Neural Network Controller For Different DC MotorDocumento18 pagineSimulation and Implementation of An Embedded Hybrid Fuzzy Trained Artificial Neural Network Controller For Different DC MotorvmspraneethNessuna valutazione finora
- Of Induction Motor Using Artificial Neural Network and Implementation in MATLABDocumento54 pagineOf Induction Motor Using Artificial Neural Network and Implementation in MATLABnareshreddy136100% (1)
- 1#a Comparative Study of PI Fuzzy and ANN Controllers For Chopper Fed DC Drive With Embedded Systems ApproachDocumento17 pagine1#a Comparative Study of PI Fuzzy and ANN Controllers For Chopper Fed DC Drive With Embedded Systems ApproachalialibabaNessuna valutazione finora
- FuzzyVC Anil 1Documento11 pagineFuzzyVC Anil 1ranga247Nessuna valutazione finora
- dSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorDocumento6 paginedSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorAshwani RanaNessuna valutazione finora
- Irjet V4i8388Documento12 pagineIrjet V4i8388Vijetha KNessuna valutazione finora
- Direct Torque Control of Symmetrical and Asymmetrical Single Phase Induction MotorDocumento4 pagineDirect Torque Control of Symmetrical and Asymmetrical Single Phase Induction MotorBook4AllNessuna valutazione finora
- Performance Analysis of Fuzzy Logic Cont PDFDocumento6 paginePerformance Analysis of Fuzzy Logic Cont PDFMuruganandam MasilamaniNessuna valutazione finora
- Speed Control of DC Motor Using Fuzzy Logic Based On LabviewDocumento5 pagineSpeed Control of DC Motor Using Fuzzy Logic Based On LabviewAbdulrahman BastaNessuna valutazione finora
- An Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveDocumento10 pagineAn Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveAbd DawaraNessuna valutazione finora
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDocumento6 pagineArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasNessuna valutazione finora
- A Software-Based Frequency Locked Loop DC Motor Drive SystemDocumento12 pagineA Software-Based Frequency Locked Loop DC Motor Drive SystemMoeed IqbalNessuna valutazione finora
- Robust Adaptive Control of Direct Drive Brushless DC Motors and Applications T o Robotic ManipulatorstDocumento6 pagineRobust Adaptive Control of Direct Drive Brushless DC Motors and Applications T o Robotic Manipulatorstbaoboi13112007Nessuna valutazione finora
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationDocumento7 pagineSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngNessuna valutazione finora
- 2Documento6 pagine2Sairam SaiNessuna valutazione finora
- Modeling and Simulation of Sensorless Control of PMSM With Luenberger Rotor Position Observer and Sui Pid ControllerDocumento8 pagineModeling and Simulation of Sensorless Control of PMSM With Luenberger Rotor Position Observer and Sui Pid ControllerYassine MbzNessuna valutazione finora
- Indirect Vector Control of Induction MotorDocumento5 pagineIndirect Vector Control of Induction MotorCharlotte ReynoldsNessuna valutazione finora
- Direct Torque Control of Cascaded Brushless Doubly Fed Induction Generator For Wind Energy ApplicationsDocumento6 pagineDirect Torque Control of Cascaded Brushless Doubly Fed Induction Generator For Wind Energy Applicationsvenky258Nessuna valutazione finora
- Analysis and Mitigation of Torsional Vibration of PM BrushlessDocumento11 pagineAnalysis and Mitigation of Torsional Vibration of PM Brushlessதிருலோகசங்கர் தேNessuna valutazione finora
- Dynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelDocumento5 pagineDynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelenmnabilNessuna valutazione finora
- Simulation Study of Conventional Control Versus MTPA-Based For PMSM ControlDocumento4 pagineSimulation Study of Conventional Control Versus MTPA-Based For PMSM Controlpersian67Nessuna valutazione finora
- 08 July 2013Documento5 pagine08 July 2013IJBSTRNessuna valutazione finora
- DSP Control of Stepper MotorDocumento5 pagineDSP Control of Stepper MotorAhmedHyderMohdNessuna valutazione finora
- Simulation DC Motor Speed Control System by Using PID ControllerDocumento6 pagineSimulation DC Motor Speed Control System by Using PID ControllerEditor IJTSRDNessuna valutazione finora
- A Novel Technique For The Design of Controller of A Vector-Controlled Permanent Magnet Synchronous Motor DriveDocumento6 pagineA Novel Technique For The Design of Controller of A Vector-Controlled Permanent Magnet Synchronous Motor Driveshoebhussain01Nessuna valutazione finora
- Brushless DC Motor Speed ControllerDocumento6 pagineBrushless DC Motor Speed Controllerالامير حسنNessuna valutazione finora
- Adaptive Input-OutputDocumento10 pagineAdaptive Input-Outputmail2pramod86Nessuna valutazione finora
- IJEART02203Documento5 pagineIJEART02203erpublicationNessuna valutazione finora
- Dynamic Simulation of A Three-Phase Induction Motor Using Matlab SimulinkDocumento5 pagineDynamic Simulation of A Three-Phase Induction Motor Using Matlab SimulinkMallikarjunBhiradeNessuna valutazione finora
- Ijset 20Documento13 pagineIjset 20Vikas PatelNessuna valutazione finora
- Adaptive Backstepping Control of Separately Excited DC Motor With UncertaintiesDocumento6 pagineAdaptive Backstepping Control of Separately Excited DC Motor With UncertaintiesEngr XamirNessuna valutazione finora
- Tripathi 2018Documento32 pagineTripathi 2018IvanNessuna valutazione finora
- Speed Control of Brushless DC Motor Using Fuzzy Logic ControllerDocumento9 pagineSpeed Control of Brushless DC Motor Using Fuzzy Logic ControllerIOSRjournalNessuna valutazione finora
- Design of Direct Torque Controller of Induction Motor (DTC) : Alnasir, Z.A. Almarhoon A.HDocumento17 pagineDesign of Direct Torque Controller of Induction Motor (DTC) : Alnasir, Z.A. Almarhoon A.HCòi HuyNessuna valutazione finora
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocumento5 pagineDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNessuna valutazione finora
- 2208EE006.ourside Fuzzy LogicDocumento6 pagine2208EE006.ourside Fuzzy LogicssNessuna valutazione finora
- Normalized Dynamic Simulation of 3-Phase Induction Motor Using Matlab/SimulinkDocumento6 pagineNormalized Dynamic Simulation of 3-Phase Induction Motor Using Matlab/SimulinkMallikarjunBhiradeNessuna valutazione finora
- Speed Control of Brushless DC Motor Using Conventional ControllersDocumento9 pagineSpeed Control of Brushless DC Motor Using Conventional ControllersMuhdnursalam ZolkepliNessuna valutazione finora
- Improved Estimation of Induction Motor Circuit Parameters With Published Motor Performance DataDocumento4 pagineImproved Estimation of Induction Motor Circuit Parameters With Published Motor Performance DataRoberto SuNessuna valutazione finora
- Design of Robust H-Infinity Speed Controller For High Performance BLDC Servo DriveDocumento6 pagineDesign of Robust H-Infinity Speed Controller For High Performance BLDC Servo DriveyaheyaNessuna valutazione finora
- M Phase MototrDocumento6 pagineM Phase MototrRija AliNessuna valutazione finora
- 245915-FinalDocumento13 pagine245915-FinalUtkarsh PrakashNessuna valutazione finora
- A Pc-Cluster Based Fully Digital Real-Time Simulation of A Field-Oriented Speed Controller For An Induction MotorDocumento25 pagineA Pc-Cluster Based Fully Digital Real-Time Simulation of A Field-Oriented Speed Controller For An Induction MotorSahabat SimatupangNessuna valutazione finora
- Design and Implementation Speed Control System of PDFDocumento8 pagineDesign and Implementation Speed Control System of PDFvince kafuaNessuna valutazione finora
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- Variable Speed AC Drives with Inverter Output FiltersDa EverandVariable Speed AC Drives with Inverter Output FiltersNessuna valutazione finora
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- RS485 Serial Communication Between Arduino Mega AnDocumento18 pagineRS485 Serial Communication Between Arduino Mega AnJason CarrNessuna valutazione finora
- MEGA2560 Rev3e SCH PDFDocumento2 pagineMEGA2560 Rev3e SCH PDFMarcelBortolotiNessuna valutazione finora
- Datasheet RS485 Shield Rev B EN PDFDocumento5 pagineDatasheet RS485 Shield Rev B EN PDFJason CarrNessuna valutazione finora
- Solar PV Training Pv-2Documento72 pagineSolar PV Training Pv-2jayminray100% (1)
- Frost 15 MresDocumento137 pagineFrost 15 MresJason CarrNessuna valutazione finora
- Necp-How To Select Brushes For Motors and Generators2 PDFDocumento16 pagineNecp-How To Select Brushes For Motors and Generators2 PDFJason CarrNessuna valutazione finora
- ZXUPS S Series Small Capacity Tower UPSDocumento2 pagineZXUPS S Series Small Capacity Tower UPSJason Carr100% (1)
- Necp-How To Select Brushes For Motors and Generators2 PDFDocumento16 pagineNecp-How To Select Brushes For Motors and Generators2 PDFJason CarrNessuna valutazione finora
- METS Resources 2014 Graphite BFDocumento2 pagineMETS Resources 2014 Graphite BFJason CarrNessuna valutazione finora
- ADE7755Documento21 pagineADE7755Jason CarrNessuna valutazione finora
- Radianseries 8048a 4048a SpecsheetDocumento2 pagineRadianseries 8048a 4048a SpecsheetAdhi Ne CutcakrowoNessuna valutazione finora
- Datasheet MultiGrid 3000VA enDocumento2 pagineDatasheet MultiGrid 3000VA enJason CarrNessuna valutazione finora
- Quiz 1st 1st Semester 2015 - 2016 JUDocumento2 pagineQuiz 1st 1st Semester 2015 - 2016 JUJason CarrNessuna valutazione finora
- State of The Art of Induction Motor ControlDocumento6 pagineState of The Art of Induction Motor Controldusan.papez9216Nessuna valutazione finora
- Synchronous Machines Theory PDFDocumento4 pagineSynchronous Machines Theory PDFRavinder SharmaNessuna valutazione finora
- 1015 IntelliCarveProDocumento2 pagine1015 IntelliCarveProJason CarrNessuna valutazione finora
- Synchronous Machines Theory PDFDocumento4 pagineSynchronous Machines Theory PDFRavinder SharmaNessuna valutazione finora
- Bearing 1Documento27 pagineBearing 1desalegn hailemichaelNessuna valutazione finora
- Coating Resins Technical Data SYNOCURE 867S - 60Documento1 paginaCoating Resins Technical Data SYNOCURE 867S - 60Heramb TrifaleyNessuna valutazione finora
- Pipe Freezing StudyDocumento8 paginePipe Freezing StudymirekwaznyNessuna valutazione finora
- Support Vector Machine Master ThesisDocumento7 pagineSupport Vector Machine Master Thesistammymajorsclarksville100% (2)
- QAI Golden Pass Fact SheetDocumento2 pagineQAI Golden Pass Fact SheetQatar-America InstituteNessuna valutazione finora
- Batron: 29 5 MM Character Height LCD Modules 29Documento1 paginaBatron: 29 5 MM Character Height LCD Modules 29Diego OliveiraNessuna valutazione finora
- Fellows (Antiques)Documento90 pagineFellows (Antiques)messapos100% (1)
- Defining The Standards For Medical Grade Honey PDFDocumento12 pagineDefining The Standards For Medical Grade Honey PDFLuis Alberto GarcíaNessuna valutazione finora
- Review Course 2 (Review On Professional Education Courses)Documento8 pagineReview Course 2 (Review On Professional Education Courses)Regie MarcosNessuna valutazione finora
- PID Marcado Operación Del Paquete Del Compresor de Hidrogeno PHP-K-002 PDFDocumento7 paginePID Marcado Operación Del Paquete Del Compresor de Hidrogeno PHP-K-002 PDFDenisNessuna valutazione finora
- Student Research Project Science ReportDocumento8 pagineStudent Research Project Science Reportapi-617553177Nessuna valutazione finora
- Gold Loan Application FormDocumento7 pagineGold Loan Application FormMahesh PittalaNessuna valutazione finora
- AIP 2020 FINAL JuneDocumento5 pagineAIP 2020 FINAL JuneVINA ARIETANessuna valutazione finora
- Macros and DirectiveDocumento7 pagineMacros and DirectiveAbdul MoeedNessuna valutazione finora
- Ferroelectric RamDocumento20 pagineFerroelectric RamRijy LoranceNessuna valutazione finora
- TESP12201R0Documento20 pagineTESP12201R0Muhammad AliNessuna valutazione finora
- Hand Winches 122 Load Sheaves 126 Gear-And Worm Gear Winches 127 Electric Worm Gear Winches 131 Snatch Blocks 133Documento14 pagineHand Winches 122 Load Sheaves 126 Gear-And Worm Gear Winches 127 Electric Worm Gear Winches 131 Snatch Blocks 133Rajaram JayaramanNessuna valutazione finora
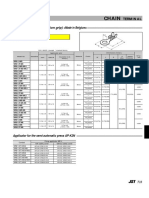
- Chain: SRB Series (With Insulation Grip)Documento1 paginaChain: SRB Series (With Insulation Grip)shankarNessuna valutazione finora
- ANTINEOPLASTICSDocumento21 pagineANTINEOPLASTICSGunjan KalyaniNessuna valutazione finora
- Machine Design 2021 Guidelines and MechanicsDocumento2 pagineMachine Design 2021 Guidelines and Mechanicsreneil llegueNessuna valutazione finora
- Science9 Q4 Week2Documento16 pagineScience9 Q4 Week2Maria Josie Lopez TumlosNessuna valutazione finora
- Adigwe J. C.: ATBU, Journal of Science, Technology & Education (JOSTE) Vol. 3 (1), January, 2015 ISSN: 2277-0011Documento16 pagineAdigwe J. C.: ATBU, Journal of Science, Technology & Education (JOSTE) Vol. 3 (1), January, 2015 ISSN: 2277-0011AnnyNessuna valutazione finora
- Corrosion Performance of Mild Steel and GalvanizedDocumento18 pagineCorrosion Performance of Mild Steel and GalvanizedNarasimha DvlNessuna valutazione finora
- FS 1 Episode 2Documento6 pagineFS 1 Episode 2Jayson Garcillan UmipigNessuna valutazione finora
- All Nobel Prizes in LiteratureDocumento16 pagineAll Nobel Prizes in LiteratureMohsin IftikharNessuna valutazione finora
- ASTR 323 Homework 4Documento2 pagineASTR 323 Homework 4Andrew IvanovNessuna valutazione finora
- Aircraft Flight Control SystemDocumento25 pagineAircraft Flight Control Systemthilina jayasooriyaNessuna valutazione finora