Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Li Etal 2012-Casein Sodio y Timol PDFDocumento9 pagineLi Etal 2012-Casein Sodio y Timol PDFIves Julian Yoplac TafurNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- NIRS SpectraStarXL BrochureDocumento6 pagineNIRS SpectraStarXL BrochureIves Julian Yoplac TafurNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Bustos Etal 2016 - Films Comest Con MCP Citral PDFDocumento8 pagineBustos Etal 2016 - Films Comest Con MCP Citral PDFIves Julian Yoplac TafurNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Li Etal 2012-Casein Sodio y Timol PDFDocumento9 pagineLi Etal 2012-Casein Sodio y Timol PDFIves Julian Yoplac TafurNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Aoac 2005Documento9 pagineAoac 2005Ives Julian Yoplac TafurNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Plant Omega-3 Functional Effects in HumansDocumento27 paginePlant Omega-3 Functional Effects in HumansIves Julian Yoplac TafurNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Unit 8 - Lesson A: Reactions: Touchstone 2nd Edition - Language Summary - Level 4Documento3 pagineUnit 8 - Lesson A: Reactions: Touchstone 2nd Edition - Language Summary - Level 4Ives Julian Yoplac TafurNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Sandhu Etal 2020-Film Carragenina Con MSRDocumento10 pagineSandhu Etal 2020-Film Carragenina Con MSRIves Julian Yoplac TafurNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Burns 2001 NIRS PreviewDocumento81 pagineBurns 2001 NIRS PreviewIves Julian Yoplac TafurNessuna valutazione finora
- CMC en Pasta de TomateDocumento4 pagineCMC en Pasta de TomateIves Julian Yoplac TafurNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hu y Wen-ImaHip en MicrobiologDocumento13 pagineHu y Wen-ImaHip en MicrobiologIves Julian Yoplac TafurNessuna valutazione finora
- 1 Beattie Et Al 2000-Influencia Del Enriq Amb Sobre El Comport y Calidad de Carne CerdoDocumento9 pagine1 Beattie Et Al 2000-Influencia Del Enriq Amb Sobre El Comport y Calidad de Carne CerdoIves Julian Yoplac TafurNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- 6 Agricul Organica Como Estra Desarrollo - IngDocumento13 pagine6 Agricul Organica Como Estra Desarrollo - IngIves Julian Yoplac TafurNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Food-Nanotechnology in PackagingDocumento11 pagineFood-Nanotechnology in PackagingIves Julian Yoplac TafurNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Computers As Components 2nd Edi - Wayne WolfDocumento815 pagineComputers As Components 2nd Edi - Wayne WolfShubham RajNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Micromaster 430: 7.5 KW - 250 KWDocumento118 pagineMicromaster 430: 7.5 KW - 250 KWAyman ElotaifyNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- 13-07-01 Declaration in Support of Skyhook Motion To CompelDocumento217 pagine13-07-01 Declaration in Support of Skyhook Motion To CompelFlorian MuellerNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- Eritrea and Ethiopia Beyond The Impasse PDFDocumento12 pagineEritrea and Ethiopia Beyond The Impasse PDFThe Ethiopian AffairNessuna valutazione finora
- Globalisation - Theories of Digital CommunicationDocumento12 pagineGlobalisation - Theories of Digital CommunicationDiya Patel-10SNessuna valutazione finora
- Dissolved Oxygen Primary Prod Activity1Documento7 pagineDissolved Oxygen Primary Prod Activity1api-235617848Nessuna valutazione finora
- An Overview of Tensorflow + Deep learning 沒一村Documento31 pagineAn Overview of Tensorflow + Deep learning 沒一村Syed AdeelNessuna valutazione finora
- Part E EvaluationDocumento9 paginePart E EvaluationManny VasquezNessuna valutazione finora
- Dinsmore - Gantt ChartDocumento1 paginaDinsmore - Gantt Chartapi-592162739Nessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Flare Finance Ecosystem MapDocumento1 paginaFlare Finance Ecosystem MapEssence of ChaNessuna valutazione finora
- E2 PTAct 9 7 1 DirectionsDocumento4 pagineE2 PTAct 9 7 1 DirectionsEmzy SorianoNessuna valutazione finora
- Part I-Final Report On Soil InvestigationDocumento16 paginePart I-Final Report On Soil InvestigationmangjuhaiNessuna valutazione finora
- How To Make Money in The Stock MarketDocumento40 pagineHow To Make Money in The Stock Markettcb66050% (2)
- Bentone 30 Msds (Eu-Be)Documento6 pagineBentone 30 Msds (Eu-Be)Amir Ososs0% (1)
- Analyze Oil Wear DebrisDocumento2 pagineAnalyze Oil Wear Debristhoma111sNessuna valutazione finora
- SAP ORC Opportunities PDFDocumento1 paginaSAP ORC Opportunities PDFdevil_3565Nessuna valutazione finora
- WELDING EQUIPMENT CALIBRATION STATUSDocumento4 pagineWELDING EQUIPMENT CALIBRATION STATUSAMIT SHAHNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Corruption in PakistanDocumento15 pagineCorruption in PakistanklutzymeNessuna valutazione finora
- Journal Publication FormatDocumento37 pagineJournal Publication FormatAbreo Dan Vincent AlmineNessuna valutazione finora
- Jurisdiction On Criminal Cases and PrinciplesDocumento6 pagineJurisdiction On Criminal Cases and PrinciplesJeffrey Garcia IlaganNessuna valutazione finora
- 9IMJan 4477 1Documento9 pagine9IMJan 4477 1Upasana PadhiNessuna valutazione finora
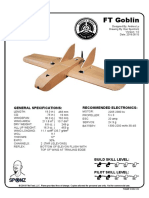
- FT Goblin Full SizeDocumento7 pagineFT Goblin Full SizeDeakon Frost100% (1)
- BlueDocumento18 pagineBluekarishma nairNessuna valutazione finora
- DSA NotesDocumento87 pagineDSA NotesAtefrachew SeyfuNessuna valutazione finora
- Ralf Behrens: About The ArtistDocumento3 pagineRalf Behrens: About The ArtistStavros DemosthenousNessuna valutazione finora
- Enerflex 381338Documento2 pagineEnerflex 381338midoel.ziatyNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- UW Computational-Finance & Risk Management Brochure Final 080613Documento2 pagineUW Computational-Finance & Risk Management Brochure Final 080613Rajel MokNessuna valutazione finora
- StandardsDocumento3 pagineStandardshappystamps100% (1)
- 1990-1994 Electrical Wiring - DiagramsDocumento13 pagine1990-1994 Electrical Wiring - Diagramsal exNessuna valutazione finora
- COVID-19's Impact on Business PresentationsDocumento2 pagineCOVID-19's Impact on Business PresentationsRetmo NandoNessuna valutazione finora
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaDa EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNessuna valutazione finora