Potrebbero piacerti anche
- Computer Processing of Remotely-Sensed Images: An IntroductionDa EverandComputer Processing of Remotely-Sensed Images: An IntroductionNessuna valutazione finora
- InsarDocumento12 pagineInsarPercy PeraltaNessuna valutazione finora
- INS/GPS/SAR Integrated Navigation With Image GeocodingDocumento7 pagineINS/GPS/SAR Integrated Navigation With Image GeocodingJuan Manuel MauroNessuna valutazione finora
- (A) Basic Operation: What Is Synthetic Aperture Radar (SAR) ?Documento12 pagine(A) Basic Operation: What Is Synthetic Aperture Radar (SAR) ?Shashibhusan MohantaNessuna valutazione finora
- Interferometric Synthetic Aperture Radar - Wikipedia, The Free EncyclopediaDocumento9 pagineInterferometric Synthetic Aperture Radar - Wikipedia, The Free EncyclopediakowsilaxNessuna valutazione finora
- Zebker 1999Documento18 pagineZebker 1999Vân AnhNessuna valutazione finora
- DEMs From RadarDocumento2 pagineDEMs From RadarPercy PeraltaNessuna valutazione finora
- DEMs From RadarDocumento2 pagineDEMs From RadarPercy PeraltaNessuna valutazione finora
- Principles of Synthetic Aperture RadarDocumento12 paginePrinciples of Synthetic Aperture RadarciaobubuNessuna valutazione finora
- Node 3Documento3 pagineNode 3FasilzebibaNessuna valutazione finora
- inSAR Processing For DEM Generation PDFDocumento8 pagineinSAR Processing For DEM Generation PDFJohn GkanatsiosNessuna valutazione finora
- SAR Interferometry - Principles & Applications (RSChatterjee)Documento33 pagineSAR Interferometry - Principles & Applications (RSChatterjee)sgrrsc100% (1)
- Insar Dem Why It Is Better?Documento8 pagineInsar Dem Why It Is Better?Percy PeraltaNessuna valutazione finora
- Sar Tomography: An Advanced Tool For 4D Spaceborne Radar Scanning With Application To Imaging and Monitoring of Cities and Single BuildingsDocumento9 pagineSar Tomography: An Advanced Tool For 4D Spaceborne Radar Scanning With Application To Imaging and Monitoring of Cities and Single BuildingsfakeNessuna valutazione finora
- Synthetic Aperture Radar - Image FormationDocumento36 pagineSynthetic Aperture Radar - Image FormationMaamar Abo100% (1)
- Fjortoft IEEE Trans GRS 1998Documento10 pagineFjortoft IEEE Trans GRS 1998Andrea FieldsNessuna valutazione finora
- System Concepts For Bi-And Multi-Static SAR MissionsDocumento10 pagineSystem Concepts For Bi-And Multi-Static SAR MissionsJuan Manuel MauroNessuna valutazione finora
- Ray Tracing (Physics)Documento5 pagineRay Tracing (Physics)chuck333Nessuna valutazione finora
- 3-5 Development of Airborne High-Resolution Multi-Parameter Imaging Radar SAR, Pi-SARDocumento18 pagine3-5 Development of Airborne High-Resolution Multi-Parameter Imaging Radar SAR, Pi-SARvinsenNessuna valutazione finora
- Bearing Height ResolutionDocumento59 pagineBearing Height ResolutionThao MaiNessuna valutazione finora
- Radar PolarimetryDocumento11 pagineRadar Polarimetryyudinraylerio.garciaNessuna valutazione finora
- 重要-2008-Fabrizio Lombardini-3-D - SAR - Tomography - The - Multibaseline - Sector - Interpolation - ApproachDocumento5 pagine重要-2008-Fabrizio Lombardini-3-D - SAR - Tomography - The - Multibaseline - Sector - Interpolation - Approachchadavid1120Nessuna valutazione finora
- Some Extra Notes On Body Waves and Mantle Tomography: 1. The Travel Time Inverse ProblemDocumento12 pagineSome Extra Notes On Body Waves and Mantle Tomography: 1. The Travel Time Inverse ProblemMar AlexNessuna valutazione finora
- ALOS AccuracyDocumento11 pagineALOS AccuracyPercy PeraltaNessuna valutazione finora
- Synthetic Aperture Radar Signal Processing Technique For Target Image GenerationDocumento4 pagineSynthetic Aperture Radar Signal Processing Technique For Target Image GenerationVarun GangwarNessuna valutazione finora
- Rs&gis Unit-IDocumento95 pagineRs&gis Unit-Isrilakshmimurala7Nessuna valutazione finora
- Measurement Accuracy in Network RTKDocumento13 pagineMeasurement Accuracy in Network RTKRebi HamzaNessuna valutazione finora
- Progress in Electromagnetics Research, Vol. 121, 19-37, 2011Documento19 pagineProgress in Electromagnetics Research, Vol. 121, 19-37, 2011Sandip MaityNessuna valutazione finora
- Principles of Synthetic Aperture Radar: Surveys in Geophysics January 2000Documento13 paginePrinciples of Synthetic Aperture Radar: Surveys in Geophysics January 2000naveen narula100% (1)
- Articulo 9-10-2012 BENEFICIOS DE LAS IMÁGENES DE RADARDocumento7 pagineArticulo 9-10-2012 BENEFICIOS DE LAS IMÁGENES DE RADARMariaNessuna valutazione finora
- 062 GC2015 3D Interferometric Refraction StaticsDocumento4 pagine062 GC2015 3D Interferometric Refraction StaticsasaNessuna valutazione finora
- Microwave Remote SensingDocumento5 pagineMicrowave Remote SensingShoumick HassanNessuna valutazione finora
- Imaging Radar Simulation in Realistic Environment Using Shooting and Bouncing Rays TechniqueDocumento7 pagineImaging Radar Simulation in Realistic Environment Using Shooting and Bouncing Rays TechniqueAsd DsaNessuna valutazione finora
- Land Subsidence Monitoring With Differential InterferometryDocumento10 pagineLand Subsidence Monitoring With Differential InterferometryUzair KhanNessuna valutazione finora
- Measurement Accuracy in Network-RTKDocumento14 pagineMeasurement Accuracy in Network-RTKRebi HamzaNessuna valutazione finora
- Remote Sensing: Preparad byDocumento21 pagineRemote Sensing: Preparad byDenish ThummarNessuna valutazione finora
- Experimental Investigation of Factors Affecting Stability of Interferometric Measurements With Ground Based Noise Waveform SARDocumento5 pagineExperimental Investigation of Factors Affecting Stability of Interferometric Measurements With Ground Based Noise Waveform SARkudriashovvladimirNessuna valutazione finora
- Time Domain Back Projection Algorithms For SARDocumento4 pagineTime Domain Back Projection Algorithms For SARnaivedya_mishraNessuna valutazione finora
- 27 DFDocumento4 pagine27 DFPAUL RODRIGUEZNessuna valutazione finora
- Performance Improvement For Constellation SAR Using Signal Processing TechniquesDocumento17 paginePerformance Improvement For Constellation SAR Using Signal Processing TechniquesJuan Manuel MauroNessuna valutazione finora
- Backprojection Autofocus For Synthetic Aperture RadarDocumento7 pagineBackprojection Autofocus For Synthetic Aperture RadarkaredokNessuna valutazione finora
- Radargrammetry and Sar InterferommetryDocumento6 pagineRadargrammetry and Sar InterferommetryvrixscribdNessuna valutazione finora
- LECTURES 31 - 32, APRIL 8 AND 15, 2004 Remote SensingDocumento10 pagineLECTURES 31 - 32, APRIL 8 AND 15, 2004 Remote SensingShrey ManishNessuna valutazione finora
- Linear FMCW Laser Radar For Precision Range and Vector Velocity MeasurementsDocumento9 pagineLinear FMCW Laser Radar For Precision Range and Vector Velocity Measurementsdgorisek1Nessuna valutazione finora
- Algorithms For Inverting Radio Occultation Signals in The Neutral AtmosphereDocumento14 pagineAlgorithms For Inverting Radio Occultation Signals in The Neutral AtmosphereNashNessuna valutazione finora
- Esa SquintDocumento11 pagineEsa Squintxmas82Nessuna valutazione finora
- Sessione 3.3 - Metodi e Tecnologie InnovativeDocumento8 pagineSessione 3.3 - Metodi e Tecnologie InnovativeGiancarlo Dal MoroNessuna valutazione finora
- Digital Magnetic Compass and Gyroscope IntegrationDocumento10 pagineDigital Magnetic Compass and Gyroscope IntegrationJosé Fernando Velázquez DamiánNessuna valutazione finora
- Global Positioning System (GPS) Antenna Calibration at The National Geodetic SurveyDocumento12 pagineGlobal Positioning System (GPS) Antenna Calibration at The National Geodetic Surveymnbv23Nessuna valutazione finora
- Efficient Stripmap SAR Raw Data Generation Taking Into Account Sensor Trajectory DeviationsDocumento5 pagineEfficient Stripmap SAR Raw Data Generation Taking Into Account Sensor Trajectory Deviationsmani567Nessuna valutazione finora
- Microwave Remote SensingDocumento27 pagineMicrowave Remote SensingGeo Informatics CEG'22Nessuna valutazione finora
- Comparison of Different Source Digital Elevation Models With Carto-DemDocumento7 pagineComparison of Different Source Digital Elevation Models With Carto-DemsgrrscNessuna valutazione finora
- Interferometric Synthetic Aperture Radar InSAR ItsDocumento6 pagineInterferometric Synthetic Aperture Radar InSAR ItskridatimaNessuna valutazione finora
- SAR Tutorial March 2013Documento38 pagineSAR Tutorial March 2013karedokNessuna valutazione finora
- Characterization and Mitigation of Interference BetweenDocumento10 pagineCharacterization and Mitigation of Interference BetweenneetisonthNessuna valutazione finora
- Remotesensing 10 01374 v2Documento32 pagineRemotesensing 10 01374 v2Ahmad Iqbal Maulana LubisNessuna valutazione finora
- Remote SensingDocumento18 pagineRemote SensingSARAH SEJARINessuna valutazione finora
- Modeling Radar On Global Positioning System: Department of Electronics, RTU, IndiaDocumento7 pagineModeling Radar On Global Positioning System: Department of Electronics, RTU, IndiaIJRAERNessuna valutazione finora
- Modelling and Simulation of Matching Networks For Multi-Antenna Communication SystemsDocumento81 pagineModelling and Simulation of Matching Networks For Multi-Antenna Communication SystemsSanjoy BasakNessuna valutazione finora
- ExtractionDocumento6 pagineExtractionSanjoy BasakNessuna valutazione finora
- Power Production From A Moderate - Temperature Geothermal ResourceDocumento8 paginePower Production From A Moderate - Temperature Geothermal ResourceSanjoy BasakNessuna valutazione finora
- Mobility Prediction and Spatial-Temporal Traffic Estimation in Wireless NetworksDocumento5 pagineMobility Prediction and Spatial-Temporal Traffic Estimation in Wireless NetworksSanjoy BasakNessuna valutazione finora
- Importance of Team Work in An OrganizationDocumento10 pagineImportance of Team Work in An OrganizationMohammad Sana Ur RabNessuna valutazione finora
- Trahar (2013) - Internationalization of The CurriculumDocumento13 pagineTrahar (2013) - Internationalization of The CurriculumUriel TorresNessuna valutazione finora
- Cattle Feed Close Tenders in BikanerDocumento9 pagineCattle Feed Close Tenders in BikanerCodm DutyNessuna valutazione finora
- Title To The ProjectDocumento14 pagineTitle To The ProjectJatinChadhaNessuna valutazione finora
- Project Proposal - Articulation SessionsDocumento8 pagineProject Proposal - Articulation SessionsJhay-are PogoyNessuna valutazione finora
- HK Magazine 03082013Documento56 pagineHK Magazine 03082013apparition9Nessuna valutazione finora
- Lesson For SpreadsheetsDocumento69 pagineLesson For SpreadsheetsCrisna Rivera PundanoNessuna valutazione finora
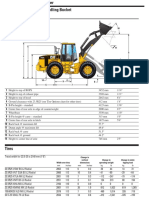
- Cat It62hDocumento4 pagineCat It62hMarceloNessuna valutazione finora
- Fouzia AnjumDocumento3 pagineFouzia AnjumAbdul SyedNessuna valutazione finora
- OPERATING MANUAL Micro Powder MillDocumento51 pagineOPERATING MANUAL Micro Powder MillSher AhmadNessuna valutazione finora
- Aermod - DRM - Course NotesDocumento25 pagineAermod - DRM - Course NotesGhulamMustafaNessuna valutazione finora
- Schema Elctrica Placa Baza Toshiba A500-13wDocumento49 pagineSchema Elctrica Placa Baza Toshiba A500-13wnicmaxxusNessuna valutazione finora
- Chapter 3 SampleDocumento12 pagineChapter 3 Samplesyarifah53Nessuna valutazione finora
- 06 BuyLog2013 MoldedCaseCircBrkrsDocumento106 pagine06 BuyLog2013 MoldedCaseCircBrkrsmarbyNessuna valutazione finora
- ZX400LCH 5GDocumento16 pagineZX400LCH 5Gusmanitp2Nessuna valutazione finora
- JQuery Interview Questions and AnswersDocumento5 pagineJQuery Interview Questions and AnswersShailesh M SassNessuna valutazione finora
- Universal Marine: Welcome To Our One Stop Marine ServicesDocumento8 pagineUniversal Marine: Welcome To Our One Stop Marine Serviceshoangtruongson1111Nessuna valutazione finora
- Sinamics gm150 sm150 Catalog d12 02 2020 enDocumento238 pagineSinamics gm150 sm150 Catalog d12 02 2020 enGo andWatchNessuna valutazione finora
- Ara FormDocumento2 pagineAra Formjerish estemNessuna valutazione finora
- The 9 Best Reasons To Choose ZultysDocumento13 pagineThe 9 Best Reasons To Choose ZultysGreg EickeNessuna valutazione finora
- Project of Consumer BehaviourDocumento28 pagineProject of Consumer BehaviourNaveed JuttNessuna valutazione finora
- On Fracture MechanicsDocumento81 pagineOn Fracture MechanicsDEEPAK100% (1)
- Jicable DAS For Power Industry Applications 2015-A3-4Documento6 pagineJicable DAS For Power Industry Applications 2015-A3-4Richard KluthNessuna valutazione finora
- National Action Plan Implementation Gaps and SuccessesDocumento8 pagineNational Action Plan Implementation Gaps and SuccessesHamza MinhasNessuna valutazione finora
- Cultural Safety Jesus SantiniDocumento2 pagineCultural Safety Jesus Santinisq4mc4vqckNessuna valutazione finora
- Tesco Travel Policy BookletDocumento64 pagineTesco Travel Policy Bookletuser001hNessuna valutazione finora
- Functions and Uses of CCTV CameraDocumento42 pagineFunctions and Uses of CCTV CameraMojere GuardiarioNessuna valutazione finora
- The PILOT: July 2023Documento16 pagineThe PILOT: July 2023RSCA Redwood ShoresNessuna valutazione finora
- AngularJS Cheat SheetDocumento3 pagineAngularJS Cheat SheetZulqarnain Hashmi100% (1)
- Digirig Mobile 1 - 9 SchematicDocumento1 paginaDigirig Mobile 1 - 9 SchematicKiki SolihinNessuna valutazione finora