Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- PRS-785 Generator-Transformer (GT) Protection Instruction ManualDocumento294 paginePRS-785 Generator-Transformer (GT) Protection Instruction ManualDebby Mendoza100% (1)
- Report GeniusofMicrogridsDocumento14 pagineReport GeniusofMicrogridsFernando ValadãoNessuna valutazione finora
- RectimatDocumento31 pagineRectimatfndprojectNessuna valutazione finora
- Ferraz A50P PDFDocumento2 pagineFerraz A50P PDFMarcel BaqueNessuna valutazione finora
- Wind Generator Fabrication PicsDocumento20 pagineWind Generator Fabrication PicsBruceBaynosaNessuna valutazione finora
- Energy Audits in Thermal Power StationDocumento62 pagineEnergy Audits in Thermal Power Stationfiroj_khan995% (22)
- Analysis of Synchronous Generator Internal Insulation FailuresDocumento5 pagineAnalysis of Synchronous Generator Internal Insulation FailuresOmar Chayña VelásquezNessuna valutazione finora
- Business Model PARAMAWE Solar Energy LTDDocumento5 pagineBusiness Model PARAMAWE Solar Energy LTDALPHONCENessuna valutazione finora
- B Power-Supplies 05-21 enDocumento28 pagineB Power-Supplies 05-21 entv1603Nessuna valutazione finora
- Lab Manual 1st Cycle VNBDocumento35 pagineLab Manual 1st Cycle VNBJam SinghNessuna valutazione finora
- EC2201 - Electrical EngineeringDocumento5 pagineEC2201 - Electrical EngineeringrgramachandranNessuna valutazione finora
- Assignment 3Documento3 pagineAssignment 3sedarNessuna valutazione finora
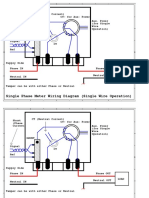
- Single Phase Meter Wiring Diagram (Single Wire Operation) : CT (Neutral Current) Shunt (Phase Current) CT-for Aux: PowerDocumento2 pagineSingle Phase Meter Wiring Diagram (Single Wire Operation) : CT (Neutral Current) Shunt (Phase Current) CT-for Aux: PowerchinninitinNessuna valutazione finora
- Dsa 8059Documento8 pagineDsa 8059joseNessuna valutazione finora
- Datasheet For 4 Poles - 50Hz at 1500rpm: Three-Phase Brushless Synchronous Ac GeneratorDocumento2 pagineDatasheet For 4 Poles - 50Hz at 1500rpm: Three-Phase Brushless Synchronous Ac GeneratordoduyphuonghnNessuna valutazione finora
- Echnical News: Power Factor, What Is It?Documento6 pagineEchnical News: Power Factor, What Is It?Fuji Electric SMBENessuna valutazione finora
- 4CAE000328 A en High Burden Tripping RelayDocumento11 pagine4CAE000328 A en High Burden Tripping RelayDave ChaudhuryNessuna valutazione finora
- Variable Frequency Drive Installation Guide: Environmental RequirementsDocumento12 pagineVariable Frequency Drive Installation Guide: Environmental RequirementsQOBITNessuna valutazione finora
- ABB 1SDC007350B0203 - Low Voltage Products - Solutions For Solar Energy PDFDocumento88 pagineABB 1SDC007350B0203 - Low Voltage Products - Solutions For Solar Energy PDFbacuoc.nguyen356Nessuna valutazione finora
- High Voltage Application PDFDocumento26 pagineHigh Voltage Application PDFsorry2qaz100% (1)
- Overview: .: PS161-6 Power Supply Installation InstructionsDocumento9 pagineOverview: .: PS161-6 Power Supply Installation InstructionsIsrael EsquivelNessuna valutazione finora
- Powerware 9355 20kva PDFDocumento16 paginePowerware 9355 20kva PDFGabino SNessuna valutazione finora
- Steam Powered GeneratorDocumento1 paginaSteam Powered GeneratorJoy ManangoNessuna valutazione finora
- Solution:Given That, Supply Voltage, V: AC MainsDocumento17 pagineSolution:Given That, Supply Voltage, V: AC MainsDeepak Gehlot100% (1)
- SDA10-4850DC Iron Lithium Battery Integrated System enDocumento2 pagineSDA10-4850DC Iron Lithium Battery Integrated System enFrancisco TorrealbaNessuna valutazione finora
- Hard To Find Information About Distribution Systems 1675171892Documento55 pagineHard To Find Information About Distribution Systems 1675171892MAJones89Nessuna valutazione finora
- Low Voltage Distribution Products: Price ListDocumento61 pagineLow Voltage Distribution Products: Price ListjoaoNessuna valutazione finora
- DS 20221019 SG4400UD-MV-20 Datasheet V14 ENDocumento2 pagineDS 20221019 SG4400UD-MV-20 Datasheet V14 ENJosue Crespo GonzalezNessuna valutazione finora
- 11kv Switchgear Commissioning - Free PDF Search Engine - FindOnTheDocumento9 pagine11kv Switchgear Commissioning - Free PDF Search Engine - FindOnTheDante Filho0% (1)