Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Frequency DNA and The Human BodypdfDocumento6 pagineFrequency DNA and The Human BodypdfRegaldna Felix100% (1)
- Hot RollingDocumento223 pagineHot RollingINDRAJIT SAO100% (1)
- Aircraft Loading and Structural LayoutDocumento626 pagineAircraft Loading and Structural Layoutlohithkumars100% (13)
- Quality Maintenance TPMDocumento42 pagineQuality Maintenance TPMSantosh SharmaNessuna valutazione finora
- Alarp-Comah 2003Documento18 pagineAlarp-Comah 2003kenoly123Nessuna valutazione finora
- Thermodynamics IntroductionDocumento255 pagineThermodynamics IntroductionPrashant KulkarniNessuna valutazione finora
- AA Introduction To MATLAB Applications in Chemical Engineering, PDFDocumento277 pagineAA Introduction To MATLAB Applications in Chemical Engineering, PDFMohammed GhanemNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Get Unlimited Downloads With A Subscription: BTG ShortageDocumento2 pagineGet Unlimited Downloads With A Subscription: BTG ShortageMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Upload A Document For Free Download Access.: Select Files From Your Computer or Choose Other Ways To Upload BelowDocumento4 pagineUpload A Document For Free Download Access.: Select Files From Your Computer or Choose Other Ways To Upload BelowMohammad Imran KhanNessuna valutazione finora
- Upload A Document For Free Download Access.: Select Files From Your Computer or Choose Other Ways To Upload BelowDocumento4 pagineUpload A Document For Free Download Access.: Select Files From Your Computer or Choose Other Ways To Upload BelowMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- PLCC-NPTI - 01.08.09: Power Line Carrier CommunicationDocumento24 paginePLCC-NPTI - 01.08.09: Power Line Carrier CommunicationMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Basics of Motors and DrivesDocumento3 pagineBasics of Motors and DrivesMohammad Imran KhanNessuna valutazione finora
- Top Categories: Search The World's Digital LibraryDocumento5 pagineTop Categories: Search The World's Digital LibraryMohammad Imran KhanNessuna valutazione finora
- Dry Cooling TowerDocumento3 pagineDry Cooling TowerMohammad Imran KhanNessuna valutazione finora
- Iegc&Standards: Grid StandardDocumento3 pagineIegc&Standards: Grid StandardMohammad Imran KhanNessuna valutazione finora
- Hydro Power - Slides For NPTIDocumento8 pagineHydro Power - Slides For NPTIMohammad Imran KhanNessuna valutazione finora
- Basic AC Generators and MotorsDocumento5 pagineBasic AC Generators and MotorsMohammad Imran KhanNessuna valutazione finora
- PneumaticsDocumento3 paginePneumaticsMohammad Imran KhanNessuna valutazione finora
- Tell Us More: Pumps & Fans-Types and How They FunctionDocumento2 pagineTell Us More: Pumps & Fans-Types and How They FunctionMohammad Imran KhanNessuna valutazione finora
- Module III - Concepts and Principles of Distribution LossDocumento14 pagineModule III - Concepts and Principles of Distribution LossMohammad Imran KhanNessuna valutazione finora
- Drum Level Pressure Compensation System. IN 210 M.W. UNITDocumento3 pagineDrum Level Pressure Compensation System. IN 210 M.W. UNITMohammad Imran KhanNessuna valutazione finora
- Tutorial & Seminar On Power System Protection & AutomationDocumento3 pagineTutorial & Seminar On Power System Protection & AutomationMohammad Imran KhanNessuna valutazione finora
- Analysis of Rankine Cycle - Techno-EconomicallyDocumento4 pagineAnalysis of Rankine Cycle - Techno-EconomicallyMohammad Imran KhanNessuna valutazione finora
- Best Practices - Simulator TrainingDocumento4 pagineBest Practices - Simulator TrainingMohammad Imran KhanNessuna valutazione finora
- Scenario of Power in India-2011Documento4 pagineScenario of Power in India-2011Mohammad Imran KhanNessuna valutazione finora
- GIRO - Global Ionospheric Radio ObservatoryDocumento20 pagineGIRO - Global Ionospheric Radio ObservatoryVincent J. CataldiNessuna valutazione finora
- Assessment 3 LINEAR PROGRAMMING PROBLEMSDocumento1 paginaAssessment 3 LINEAR PROGRAMMING PROBLEMSKim Melo YeclaNessuna valutazione finora
- Pubali Bank Limited: Post NameDocumento6 paginePubali Bank Limited: Post NametitoNessuna valutazione finora
- Modern Power System Analysis ToolsDocumento6 pagineModern Power System Analysis ToolsElliott M.Nessuna valutazione finora
- Makoto Umeki - A Locally Induced Homoclinic Motion of The Vortex FilamentDocumento2 pagineMakoto Umeki - A Locally Induced Homoclinic Motion of The Vortex FilamentVing666789Nessuna valutazione finora
- (Help) OLS Classical Assumptions PDFDocumento3 pagine(Help) OLS Classical Assumptions PDFasdfghNessuna valutazione finora
- Applied Harmonic Analysis PosterDocumento1 paginaApplied Harmonic Analysis PosterAlborz ZibaiiNessuna valutazione finora
- Thermodynamics and Kinetic Theory of Gases ConceptsDocumento4 pagineThermodynamics and Kinetic Theory of Gases ConceptsTarun GuptaNessuna valutazione finora
- Quarter 2 Grade 4 Math Week 6Documento4 pagineQuarter 2 Grade 4 Math Week 6PETER JHARIELLE ANGELESNessuna valutazione finora
- SPH4U Classwork 1.5 and 1.6Documento5 pagineSPH4U Classwork 1.5 and 1.6王博瑀Nessuna valutazione finora
- 2022 CSC 353 2.0 2 Alphabets and LanguagesDocumento3 pagine2022 CSC 353 2.0 2 Alphabets and LanguagesChavini HewageNessuna valutazione finora
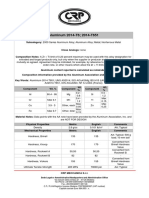
- Aluminium 2014 t6 2014 t651 PDFDocumento3 pagineAluminium 2014 t6 2014 t651 PDFAbhishek AnandNessuna valutazione finora
- QuadraticDocumento10 pagineQuadraticdaveymilan36Nessuna valutazione finora
- Introduction to Piezoelectricity BasicsDocumento19 pagineIntroduction to Piezoelectricity BasicssiddharthNessuna valutazione finora
- Inter Level - (Xi & Xii STD) Ramanujan Contest-2022Documento4 pagineInter Level - (Xi & Xii STD) Ramanujan Contest-2022Anju GuptaNessuna valutazione finora
- POLAR FORMDocumento18 paginePOLAR FORMSarahNessuna valutazione finora
- Hceh Ijer - 2014 Ncetmesd 07Documento7 pagineHceh Ijer - 2014 Ncetmesd 07scarface666Nessuna valutazione finora
- The Burden of Proof and The PresumptionsDocumento13 pagineThe Burden of Proof and The PresumptionsMargie BaalNessuna valutazione finora
- ECCW Math 1LS3 Calculus For Life SciencesDocumento338 pagineECCW Math 1LS3 Calculus For Life SciencesKaylee & HayleeNessuna valutazione finora
- International English School of AbidjanDocumento21 pagineInternational English School of AbidjanBENI DE DIEU SERVICESNessuna valutazione finora
- Maths - SPATIAL REASONING & GEOMETRY - Unit Plan R/1Documento3 pagineMaths - SPATIAL REASONING & GEOMETRY - Unit Plan R/1mbed2010Nessuna valutazione finora
- Batteries enDocumento1 paginaBatteries enRogelio MolinaNessuna valutazione finora