Potrebbero piacerti anche
- DS1624Documento17 pagineDS1624superpuma86Nessuna valutazione finora
- DS1624Documento15 pagineDS1624jnax101Nessuna valutazione finora
- DS1801 Dual Audio Taper Potentiometer: Features Pin AssignmentDocumento10 pagineDS1801 Dual Audio Taper Potentiometer: Features Pin AssignmentnicolaunmNessuna valutazione finora
- Ntroduction: Real Time Clock Serial Interface I/ODocumento17 pagineNtroduction: Real Time Clock Serial Interface I/ORahul SarangleNessuna valutazione finora
- DS1307 64 X 8 Serial Real-Time Clock: FeaturesDocumento8 pagineDS1307 64 X 8 Serial Real-Time Clock: FeaturesCarlos ArangurenNessuna valutazione finora
- Dual Digital Potentiometer Chip with Ultra-Low Power and Temperature CompensationDocumento12 pagineDual Digital Potentiometer Chip with Ultra-Low Power and Temperature CompensationManuel NolascoNessuna valutazione finora
- 512 Kbit Serial I C Bus EEPROM: DescriptionDocumento19 pagine512 Kbit Serial I C Bus EEPROM: DescriptionJavier MainarNessuna valutazione finora
- Interfacing The DS1307 With An 8051-Compatible MicrocontrollerDocumento20 pagineInterfacing The DS1307 With An 8051-Compatible MicrocontrollerHUNGDTK37Nessuna valutazione finora
- DS1307Documento13 pagineDS1307Ezaú TalamantesNessuna valutazione finora
- DS1624 Digital Thermometer and Memory: Features Pin AssignmentDocumento16 pagineDS1624 Digital Thermometer and Memory: Features Pin AssignmentJhónatan JuárezNessuna valutazione finora
- PCF8582C-2: 1. DescriptionDocumento21 paginePCF8582C-2: 1. DescriptionroozbehxoxNessuna valutazione finora
- 24C02Documento27 pagine24C02Biswajit SarkarNessuna valutazione finora
- CD 00003131Documento24 pagineCD 000031314131etasNessuna valutazione finora
- LS7366 PulseCounter PDFDocumento10 pagineLS7366 PulseCounter PDFJoan WascNessuna valutazione finora
- EDN Design Ideas 1998Documento166 pagineEDN Design Ideas 1998chag1956100% (4)
- MAX232&RS232Documento6 pagineMAX232&RS232api-19786583Nessuna valutazione finora
- 16K 1.8V I C Serial EEPROM: FeaturesDocumento12 pagine16K 1.8V I C Serial EEPROM: FeaturesKrzysztof BondkaNessuna valutazione finora
- Interfacing The DS1307/1308 With An 8051-Compatible MicrocontrollerDocumento23 pagineInterfacing The DS1307/1308 With An 8051-Compatible Microcontrollernik_n_89100% (2)
- 09 - I2C Serial CommunicationsmDocumento10 pagine09 - I2C Serial CommunicationsmSorabh DungNessuna valutazione finora
- Data SheetDocumento18 pagineData SheetJonas AldaoNessuna valutazione finora
- Hi-fi stereo audio processor I2C-bus specDocumento24 pagineHi-fi stereo audio processor I2C-bus specAriel NavarreteNessuna valutazione finora
- Presentation PDFDocumento17 paginePresentation PDFvinodNessuna valutazione finora
- MC Unit 4Documento42 pagineMC Unit 4Kalai VaniNessuna valutazione finora
- 8086 Pin ConfigurationDocumento83 pagine8086 Pin ConfigurationVenkata Krishnakanth ParuchuriNessuna valutazione finora
- 24C02-8 EepromDocumento16 pagine24C02-8 EepromJesus Almanzar SantosNessuna valutazione finora
- Good Data SheetDocumento20 pagineGood Data SheetNipuna Thushara WijesekaraNessuna valutazione finora
- 24 LC 32Documento14 pagine24 LC 32Shuchi Raju AgrawalNessuna valutazione finora
- Unit 2-3Documento38 pagineUnit 2-3vidhya sNessuna valutazione finora
- Inter Integrated CircuitDocumento6 pagineInter Integrated CircuitkamelNessuna valutazione finora
- MK41T56 MKI41T56: 512 Bit (64b x8) Serial Access TIMEKEEPER SramDocumento16 pagineMK41T56 MKI41T56: 512 Bit (64b x8) Serial Access TIMEKEEPER SramzdravkorrNessuna valutazione finora
- ANALOG TO DIGITAL AND DIGITAL TO ANALOG INTERFACINGDocumento28 pagineANALOG TO DIGITAL AND DIGITAL TO ANALOG INTERFACINGsatyanarayana12Nessuna valutazione finora
- I2C Bus Overview - The Inter-Integrated Circuit Communication ProtocolDocumento19 pagineI2C Bus Overview - The Inter-Integrated Circuit Communication ProtocolMohamed Ali100% (3)
- Remote Controlled Digital Audio Processor - Full Project AvailableDocumento3 pagineRemote Controlled Digital Audio Processor - Full Project AvailableK Raja SekarNessuna valutazione finora
- RF-Based Multiple Device Control Using MicrocontrollerDocumento7 pagineRF-Based Multiple Device Control Using Microcontrollermv mvNessuna valutazione finora
- The I C-Bus Specification: 6 Bit TransferDocumento54 pagineThe I C-Bus Specification: 6 Bit Transferprasanth_vedanthamNessuna valutazione finora
- ST24 25C04, ST24 25W04Documento16 pagineST24 25C04, ST24 25W04Zoran KovacevicNessuna valutazione finora
- DS1302 Real-Time Clock Chip with 31-Byte RAMDocumento16 pagineDS1302 Real-Time Clock Chip with 31-Byte RAMJuan Isaac Rodriquez MaldonadoNessuna valutazione finora
- Data Sheet: ADJD-S311-CR999Documento20 pagineData Sheet: ADJD-S311-CR999Milo LatinoNessuna valutazione finora
- Quadrature To Rs232 CardDocumento8 pagineQuadrature To Rs232 Cardtomjordan12321Nessuna valutazione finora
- NXP I2Cbus Elements SASEDocumento79 pagineNXP I2Cbus Elements SASEPablo Cotan100% (2)
- DS1804Documento6 pagineDS1804jnax101Nessuna valutazione finora
- 24 LC 16 BDocumento12 pagine24 LC 16 BAnonymous UxrPsIVNessuna valutazione finora
- 24C64 BMDocumento10 pagine24C64 BMdonghungstbNessuna valutazione finora
- Advanced Microprocessors Pin DetailsDocumento39 pagineAdvanced Microprocessors Pin DetailsVinoda DhayanitheNessuna valutazione finora
- 24Lc04B/08B: 4K/8K 2.5V I C Serial EepromsDocumento13 pagine24Lc04B/08B: 4K/8K 2.5V I C Serial EepromsJose Antonio Lopez JuradoNessuna valutazione finora
- An 124Documento4 pagineAn 124Ank Electro FuzzNessuna valutazione finora
- 24C02 24C04 24C08 24C16: Bookly MicroDocumento10 pagine24C02 24C04 24C08 24C16: Bookly MicroHùng Nguyễn VănNessuna valutazione finora
- DS1804 PDFDocumento10 pagineDS1804 PDFhelveciotfNessuna valutazione finora
- I2C Protocol Design For ReusabilityDocumento8 pagineI2C Protocol Design For ReusabilityAkshay KashyapNessuna valutazione finora
- Mp&i Course File - unit-IIIDocumento23 pagineMp&i Course File - unit-IIIvenkateshrachaNessuna valutazione finora
- DS1804Documento10 pagineDS1804Brzata PticaNessuna valutazione finora
- Embedded C Module 4Documento29 pagineEmbedded C Module 4Sampath ShettyNessuna valutazione finora
- Cat5113 DDocumento13 pagineCat5113 DVolkan YılmazNessuna valutazione finora
- 7 A H-Bridge for DC-Motor ApplicationsDocumento29 pagine7 A H-Bridge for DC-Motor ApplicationsJoão JoséNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsDa EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsValutazione: 3 su 5 stelle3/5 (2)
- 9619 Sony KDL-22BX300 KDL-32BX300 Chassis AZ1-FK Televisor LCD Manual de ServicioDocumento32 pagine9619 Sony KDL-22BX300 KDL-32BX300 Chassis AZ1-FK Televisor LCD Manual de ServicioFavgFavgNessuna valutazione finora
- 5-Mode Preset EQ IC with Bass Boost & 3DDocumento5 pagine5-Mode Preset EQ IC with Bass Boost & 3DzektorNessuna valutazione finora
- Tpa 3113Documento33 pagineTpa 3113zektorNessuna valutazione finora
- TLC 5925Documento27 pagineTLC 5925zektorNessuna valutazione finora
- Rotel Ra-1000 SMDocumento12 pagineRotel Ra-1000 SMzektorNessuna valutazione finora
- Top242 250 9213Documento53 pagineTop242 250 9213zektor100% (1)
- Rotel RB-1090 Service ManualDocumento10 pagineRotel RB-1090 Service ManualzektorNessuna valutazione finora
- 2sa1941 & 2SC5198 - 140V - 10a - 100W - Audio AmplifierDocumento4 pagine2sa1941 & 2SC5198 - 140V - 10a - 100W - Audio Amplifiercris_powerNessuna valutazione finora
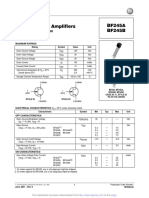
- BF245ADocumento8 pagineBF245Acreed1000Nessuna valutazione finora
- DAC08Documento20 pagineDAC08Severiano Jaramillo QuintanarNessuna valutazione finora
- FSQ311Documento24 pagineFSQ311zektorNessuna valutazione finora
- TO-220 Plastic-Encapsulate Transistors: FeaturesDocumento1 paginaTO-220 Plastic-Encapsulate Transistors: FeatureszektorNessuna valutazione finora
- 1N5817Documento3 pagine1N5817Gallego OrtizNessuna valutazione finora
- FSQ110 Green Mode Fairchild Power Switch (FPS™) : Features DescriptionDocumento12 pagineFSQ110 Green Mode Fairchild Power Switch (FPS™) : Features DescriptionJohan BeckersNessuna valutazione finora
- 2sb649a PDFDocumento9 pagine2sb649a PDFperro sNessuna valutazione finora
- Silicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDocumento3 pagineSilicon NPN Power Transistors: Savantic Semiconductor Product SpecificationzektorNessuna valutazione finora
- 2N4036 2N4037 PNP Silicon Transistor DescriptionDocumento2 pagine2N4036 2N4037 PNP Silicon Transistor DescriptionzektorNessuna valutazione finora
- Bs 170Documento4 pagineBs 170zektorNessuna valutazione finora
- PT2258Documento15 paginePT2258zektor100% (1)
- 2 N 2219 ADocumento8 pagine2 N 2219 Aaaa55603Nessuna valutazione finora
- 2N3053 2N3053A Silicon NPN Transistors DescriptionDocumento2 pagine2N3053 2N3053A Silicon NPN Transistors DescriptionzektorNessuna valutazione finora
- Max 5492Documento8 pagineMax 5492zektorNessuna valutazione finora
- LCD AddressingDocumento10 pagineLCD AddressingzektorNessuna valutazione finora
- 2sa1941 & 2SC5198 - 140V - 10a - 100W - Audio AmplifierDocumento4 pagine2sa1941 & 2SC5198 - 140V - 10a - 100W - Audio Amplifiercris_powerNessuna valutazione finora
- 2N3053 2N3053A Silicon NPN Transistors DescriptionDocumento2 pagine2N3053 2N3053A Silicon NPN Transistors DescriptionzektorNessuna valutazione finora
- 2N4036 2N4037 PNP Silicon Transistor DescriptionDocumento2 pagine2N4036 2N4037 PNP Silicon Transistor DescriptionzektorNessuna valutazione finora
- Power Integrations LNK304PNDocumento16 paginePower Integrations LNK304PNnicelio_alvesNessuna valutazione finora
- Old Company Name in Catalogs and Other DocumentsDocumento10 pagineOld Company Name in Catalogs and Other DocumentszektorNessuna valutazione finora
- PT 2256Documento4 paginePT 2256zektorNessuna valutazione finora
- Quiz UtpDocumento7 pagineQuiz UtplesterNessuna valutazione finora
- Private Security Industry ReportDocumento40 paginePrivate Security Industry ReportkarndeNessuna valutazione finora
- Paper 19 Revised PDFDocumento520 paginePaper 19 Revised PDFAmey Mehta100% (1)
- Unit 4: A World of Ideas: Learning CompassDocumento3 pagineUnit 4: A World of Ideas: Learning CompassRica Mae Lepiten MendiolaNessuna valutazione finora
- TROOP - of - District 2013 Scouting's Journey To ExcellenceDocumento2 pagineTROOP - of - District 2013 Scouting's Journey To ExcellenceAReliableSourceNessuna valutazione finora
- Manual de Motores Vol 4Documento75 pagineManual de Motores Vol 4Gabriel Piñon Conde100% (1)
- About Kia Motors Corporation: All-NewDocumento19 pagineAbout Kia Motors Corporation: All-NewWessam FathiNessuna valutazione finora
- Lesson 3 - Subtract Two 4-Digit Numbers - More Than One Exchange 2019Documento2 pagineLesson 3 - Subtract Two 4-Digit Numbers - More Than One Exchange 2019mNessuna valutazione finora
- Portfolio Management Banking SectorDocumento133 paginePortfolio Management Banking SectorNitinAgnihotri100% (1)
- Cough: by Dr. Meghana Patil (Intern Batch 2016)Documento24 pagineCough: by Dr. Meghana Patil (Intern Batch 2016)Meghana PatilNessuna valutazione finora
- Module 1 (Social Innovation)Documento7 pagineModule 1 (Social Innovation)Marinette Medrano50% (2)
- Y-Site Drug Compatibility TableDocumento6 pagineY-Site Drug Compatibility TableArvenaa SubramaniamNessuna valutazione finora
- IEEE Registration StuffDocumento11 pagineIEEE Registration StuffsegeluluNessuna valutazione finora
- The Mpeg Dash StandardDocumento6 pagineThe Mpeg Dash Standard9716755397Nessuna valutazione finora
- Caterpillar Cat 330L EXCAVATOR (Prefix 8FK) Service Repair Manual (8FK00001 and Up)Documento27 pagineCaterpillar Cat 330L EXCAVATOR (Prefix 8FK) Service Repair Manual (8FK00001 and Up)kfm8seuuduNessuna valutazione finora
- A Study of Arcing Fault in The Low-Voltage Electrical InstallationDocumento11 pagineA Study of Arcing Fault in The Low-Voltage Electrical Installationaddin100% (1)
- Optimization TheoryDocumento18 pagineOptimization TheoryDivine Ada PicarNessuna valutazione finora
- Dhilshahilan Rajaratnam: Work ExperienceDocumento5 pagineDhilshahilan Rajaratnam: Work ExperienceShazard ShortyNessuna valutazione finora
- OspndDocumento97 pagineOspndhoangdo11122002Nessuna valutazione finora
- Emmanuel James Oteng, F. Inst. L. Ex. Legal Executive LawyerDocumento3 pagineEmmanuel James Oteng, F. Inst. L. Ex. Legal Executive Lawyeremmanuel otengNessuna valutazione finora
- Error 500 Unknown Column 'A.note' in 'Field List' - Joomla! Forum - Community, Help and SupportDocumento1 paginaError 500 Unknown Column 'A.note' in 'Field List' - Joomla! Forum - Community, Help and Supportsmart.engineerNessuna valutazione finora
- Tutorial: Energy Profiles ManagerDocumento6 pagineTutorial: Energy Profiles ManagerDavid Yungan GonzalezNessuna valutazione finora
- Frito LaysDocumento6 pagineFrito LaysElcamino Torrez50% (2)
- Integrated Building Management Platform for Security, Maintenance and Energy EfficiencyDocumento8 pagineIntegrated Building Management Platform for Security, Maintenance and Energy EfficiencyRajesh RajendranNessuna valutazione finora
- Deploy A REST API Using Serverless, Express and Node - JsDocumento13 pagineDeploy A REST API Using Serverless, Express and Node - JszaninnNessuna valutazione finora
- Climate Smart Agriculture Manual FINAL 2 2 Sent in Sierra Leones PDFDocumento201 pagineClimate Smart Agriculture Manual FINAL 2 2 Sent in Sierra Leones PDFKarthikNessuna valutazione finora
- Jan 2023 CL1Documento9 pagineJan 2023 CL1loai allam100% (2)
- Dimetra Tetra System White PaperDocumento6 pagineDimetra Tetra System White PapermosaababbasNessuna valutazione finora
- Solar Winds OrionAPM DatasheetDocumento4 pagineSolar Winds OrionAPM DatasheetArun J D'SouzaNessuna valutazione finora
- Task Based Risk Assesment FormDocumento2 pagineTask Based Risk Assesment FormKolluri SrinivasNessuna valutazione finora