Potrebbero piacerti anche
- Mathematical Foundations of Information TheoryDa EverandMathematical Foundations of Information TheoryValutazione: 3.5 su 5 stelle3.5/5 (9)
- Interval-Valued and Fuzzy-Valued Random Variables: From Computing Sample Variances To Computing Sample CovariancesDocumento1 paginaInterval-Valued and Fuzzy-Valued Random Variables: From Computing Sample Variances To Computing Sample CovariancesMahbubRiyadNessuna valutazione finora
- Learn Statistics Fast: A Simplified Detailed Version for StudentsDa EverandLearn Statistics Fast: A Simplified Detailed Version for StudentsNessuna valutazione finora
- Guesstimation: A New Justification of The Geometric Mean HeuristicDocumento7 pagineGuesstimation: A New Justification of The Geometric Mean HeuristicPiyushGargNessuna valutazione finora
- Detecting A Vector Based On Linear Measurements: Ery Arias-CastroDocumento9 pagineDetecting A Vector Based On Linear Measurements: Ery Arias-Castroshyam_utdNessuna valutazione finora
- Lecture 11: Standard Error, Propagation of Error, Central Limit Theorem in The Real WorldDocumento13 pagineLecture 11: Standard Error, Propagation of Error, Central Limit Theorem in The Real WorldWisnu van NugrooyNessuna valutazione finora
- Sample Theory With Ques. - Estimation (JAM MS Unit-14)Documento25 pagineSample Theory With Ques. - Estimation (JAM MS Unit-14)ZERO TO VARIABLENessuna valutazione finora
- Assignment 1 StatisticsDocumento6 pagineAssignment 1 Statisticsjaspreet46Nessuna valutazione finora
- MLT Assignment 1Documento13 pagineMLT Assignment 1Dinky NandwaniNessuna valutazione finora
- Theory of Uncertainty of Measurement PDFDocumento14 pagineTheory of Uncertainty of Measurement PDFLong Nguyễn VănNessuna valutazione finora
- Data Analysis For Physics Laboratory: Standard ErrorsDocumento5 pagineData Analysis For Physics Laboratory: Standard Errorsccouy123Nessuna valutazione finora
- Mean, Standard Deviation, and Counting StatisticsDocumento2 pagineMean, Standard Deviation, and Counting StatisticsMohamed NaeimNessuna valutazione finora
- Principles of Error AnalysisDocumento11 paginePrinciples of Error Analysisbasura12345Nessuna valutazione finora
- A Case Study of Bank Queueing Model: Kasturi Nirmala, DR - Shahnaz BathulDocumento8 pagineA Case Study of Bank Queueing Model: Kasturi Nirmala, DR - Shahnaz BathulIJERDNessuna valutazione finora
- Error Analysis, W011Documento12 pagineError Analysis, W011Evan KeastNessuna valutazione finora
- Unit 5 Probabilistic ModelsDocumento39 pagineUnit 5 Probabilistic ModelsRam100% (1)
- Lecture Notes Week 2Documento10 pagineLecture Notes Week 2tarik BenseddikNessuna valutazione finora
- Insppt 6Documento21 pagineInsppt 6Md Talha JavedNessuna valutazione finora
- Robust Statistics For Outlier Detection (Peter J. Rousseeuw and Mia Hubert)Documento8 pagineRobust Statistics For Outlier Detection (Peter J. Rousseeuw and Mia Hubert)Robert PetersonNessuna valutazione finora
- Linear Models: The Least-Squares MethodDocumento24 pagineLinear Models: The Least-Squares MethodAnimated EngineerNessuna valutazione finora
- Lecture4 Mech SUDocumento17 pagineLecture4 Mech SUNazeeh Abdulrhman AlbokaryNessuna valutazione finora
- Statistics 21march2018Documento25 pagineStatistics 21march2018Parth JatakiaNessuna valutazione finora
- Basic Statistics For Data ScienceDocumento45 pagineBasic Statistics For Data ScienceBalasaheb ChavanNessuna valutazione finora
- Basic Probability Reference Sheet: February 27, 2001Documento8 pagineBasic Probability Reference Sheet: February 27, 2001Ibrahim TakounaNessuna valutazione finora
- PDF ResizeDocumento31 paginePDF ResizeFahmi AlamsyahNessuna valutazione finora
- Block 7Documento34 pagineBlock 7Harsh kumar MeerutNessuna valutazione finora
- Unit 18Documento12 pagineUnit 18Harsh kumar MeerutNessuna valutazione finora
- Notes On Asymptotic Theory: IGIER-Bocconi, IZA and FRDBDocumento11 pagineNotes On Asymptotic Theory: IGIER-Bocconi, IZA and FRDBLuisa HerreraNessuna valutazione finora
- Errors and DeviationsDocumento8 pagineErrors and DeviationsSumit SahaNessuna valutazione finora
- ECE523 Engineering Applications of Machine Learning and Data Analytics - Bayes and Risk - 1Documento7 pagineECE523 Engineering Applications of Machine Learning and Data Analytics - Bayes and Risk - 1wandalexNessuna valutazione finora
- 1983 S Baker R D Cousins-NIM 221 437-442Documento6 pagine1983 S Baker R D Cousins-NIM 221 437-442shusakuNessuna valutazione finora
- Topic 5: Probability Bounds and The Distribution of Sample StatisticsDocumento16 pagineTopic 5: Probability Bounds and The Distribution of Sample Statisticss05xoNessuna valutazione finora
- Lectura 1 Point EstimationDocumento47 pagineLectura 1 Point EstimationAlejandro MarinNessuna valutazione finora
- Measurement and UncertaintyDocumento12 pagineMeasurement and UncertaintyTiến Dũng100% (1)
- Nbs VonneumannDocumento3 pagineNbs VonneumannRishav DhungelNessuna valutazione finora
- Errors Eng 1 - Part5Documento4 pagineErrors Eng 1 - Part5awrr qrq2rNessuna valutazione finora
- Wickham StatiDocumento12 pagineWickham StatiJitendra K JhaNessuna valutazione finora
- Non Linear Root FindingDocumento16 pagineNon Linear Root FindingMichael Ayobami AdelekeNessuna valutazione finora
- ST2187 Block 5Documento15 pagineST2187 Block 5Joseph MatthewNessuna valutazione finora
- Statistics PDFDocumento17 pagineStatistics PDFSauravNessuna valutazione finora
- Chapter 1 To Chapter 2 Stat 222Documento21 pagineChapter 1 To Chapter 2 Stat 222Edgar MagturoNessuna valutazione finora
- Fundamentals of ProbabilityDocumento58 pagineFundamentals of Probabilityhien05Nessuna valutazione finora
- Math TRM PPRDocumento15 pagineMath TRM PPRsummitzNessuna valutazione finora
- An Introduction To Objective Bayesian Statistics PDFDocumento69 pagineAn Introduction To Objective Bayesian Statistics PDFWaterloo Ferreira da SilvaNessuna valutazione finora
- Basic Concepts of Inference: Corresponds To Chapter 6 of Tamhane and DunlopDocumento40 pagineBasic Concepts of Inference: Corresponds To Chapter 6 of Tamhane and Dunlopakirank1Nessuna valutazione finora
- Using Extreme Value Theory To Optimally Design PV Applications Under Climate ChangeDocumento7 pagineUsing Extreme Value Theory To Optimally Design PV Applications Under Climate ChangeSEP-PublisherNessuna valutazione finora
- CHP 5Documento63 pagineCHP 5its9918kNessuna valutazione finora
- Bayesian Regression and BitcoinDocumento6 pagineBayesian Regression and BitcoinJowPersonaVieceliNessuna valutazione finora
- Notes On Sampling and Hypothesis TestingDocumento10 pagineNotes On Sampling and Hypothesis Testinghunt_pgNessuna valutazione finora
- Analysis of Random Errors in Physical MeasurementsDocumento48 pagineAnalysis of Random Errors in Physical MeasurementsApurva SahaNessuna valutazione finora
- 3.6: General Hypothesis TestsDocumento6 pagine3.6: General Hypothesis Testssound05Nessuna valutazione finora
- 1.august 8 Class NotesDocumento3 pagine1.august 8 Class Notesman humanNessuna valutazione finora
- Statistical InferenceDocumento15 pagineStatistical InferenceDynamic ClothesNessuna valutazione finora
- Lect1 12Documento32 pagineLect1 12Ankit SaxenaNessuna valutazione finora
- StatsLecture1 ProbabilityDocumento4 pagineStatsLecture1 Probabilitychoi7Nessuna valutazione finora
- Beyond The Bakushinkii Veto - Regularising Linear Inverse Problems Without Knowing The Noise DistributionDocumento23 pagineBeyond The Bakushinkii Veto - Regularising Linear Inverse Problems Without Knowing The Noise Distributionzys johnsonNessuna valutazione finora
- Notes On EstimationDocumento4 pagineNotes On EstimationAnandeNessuna valutazione finora
- International Journal of Uncertainty, Fuzziness and Knowledge-Based Systems Vol. 19, No. 6 (2011) 1059 - C World Scientific Publishing CompanyDocumento2 pagineInternational Journal of Uncertainty, Fuzziness and Knowledge-Based Systems Vol. 19, No. 6 (2011) 1059 - C World Scientific Publishing CompanyjimakosjpNessuna valutazione finora
- Method Least SquaresDocumento7 pagineMethod Least SquaresZahid SaleemNessuna valutazione finora
- Construction Claims and Contract Admin CPDDocumento40 pagineConstruction Claims and Contract Admin CPDCraig FawcettNessuna valutazione finora
- Amerex Ansul Badger Ul Catalogo Por PartesDocumento37 pagineAmerex Ansul Badger Ul Catalogo Por PartesPuma De La Torre ExtintoresNessuna valutazione finora
- Unit 20: TroubleshootingDocumento12 pagineUnit 20: TroubleshootingDongjin LeeNessuna valutazione finora
- Effective TeachingDocumento94 pagineEffective Teaching小曼Nessuna valutazione finora
- The Handmaid's TaleDocumento40 pagineThe Handmaid's Taleleher shahNessuna valutazione finora
- Ferroelectric RamDocumento20 pagineFerroelectric RamRijy LoranceNessuna valutazione finora
- Anykycaccount Com Product Payoneer Bank Account PDFDocumento2 pagineAnykycaccount Com Product Payoneer Bank Account PDFAnykycaccountNessuna valutazione finora
- Shelly Cashman Series Microsoft Office 365 Excel 2016 Comprehensive 1st Edition Freund Solutions ManualDocumento5 pagineShelly Cashman Series Microsoft Office 365 Excel 2016 Comprehensive 1st Edition Freund Solutions Manualjuanlucerofdqegwntai100% (10)
- Lecture BouffonDocumento1 paginaLecture BouffonCarlos Enrique GuerraNessuna valutazione finora
- MSDS Leadframe (16 Items)Documento8 pagineMSDS Leadframe (16 Items)bennisg8Nessuna valutazione finora
- ENSC1001 Unit Outline 2014Documento12 pagineENSC1001 Unit Outline 2014TheColonel999Nessuna valutazione finora
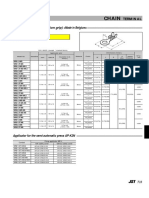
- Chain: SRB Series (With Insulation Grip)Documento1 paginaChain: SRB Series (With Insulation Grip)shankarNessuna valutazione finora
- Week 3 Alds 2202Documento13 pagineWeek 3 Alds 2202lauren michaelsNessuna valutazione finora
- Lab 1Documento51 pagineLab 1aliNessuna valutazione finora
- Do Now:: What Is Motion? Describe The Motion of An ObjectDocumento18 pagineDo Now:: What Is Motion? Describe The Motion of An ObjectJO ANTHONY ALIGORANessuna valutazione finora
- A Structural Modelo of Limital Experienci Un TourismDocumento15 pagineA Structural Modelo of Limital Experienci Un TourismcecorredorNessuna valutazione finora
- Handout Waste Catch BasinDocumento2 pagineHandout Waste Catch BasinJonniel De GuzmanNessuna valutazione finora
- Turner Et Al. 1991 ASUDS SystemDocumento10 pagineTurner Et Al. 1991 ASUDS SystemRocio HerreraNessuna valutazione finora
- Cummins: ISX15 CM2250Documento17 pagineCummins: ISX15 CM2250haroun100% (4)
- Gracella Irwana - G - Pert 04 - Sia - 1Documento35 pagineGracella Irwana - G - Pert 04 - Sia - 1Gracella IrwanaNessuna valutazione finora
- Corrosion Performance of Mild Steel and GalvanizedDocumento18 pagineCorrosion Performance of Mild Steel and GalvanizedNarasimha DvlNessuna valutazione finora
- A-1660 11TH Trimester From Mcdowell To Vodafone Interpretation of Tax Law in Cases. OriginalDocumento18 pagineA-1660 11TH Trimester From Mcdowell To Vodafone Interpretation of Tax Law in Cases. OriginalPrasun TiwariNessuna valutazione finora
- Bullying Report - Ending The Torment: Tackling Bullying From The Schoolyard To CyberspaceDocumento174 pagineBullying Report - Ending The Torment: Tackling Bullying From The Schoolyard To CyberspaceAlexandre AndréNessuna valutazione finora
- CrimDocumento29 pagineCrimkeziahmae.bagacinaNessuna valutazione finora
- Dragons ScaleDocumento13 pagineDragons ScaleGuilherme De FariasNessuna valutazione finora
- Ferrero A.M. Et Al. (2015) - Experimental Tests For The Application of An Analytical Model For Flexible Debris Flow Barrier Design PDFDocumento10 pagineFerrero A.M. Et Al. (2015) - Experimental Tests For The Application of An Analytical Model For Flexible Debris Flow Barrier Design PDFEnrico MassaNessuna valutazione finora
- HPSC HCS Exam 2021: Important DatesDocumento6 pagineHPSC HCS Exam 2021: Important DatesTejaswi SaxenaNessuna valutazione finora
- Adolescents' Gender and Their Social Adjustment The Role of The Counsellor in NigeriaDocumento20 pagineAdolescents' Gender and Their Social Adjustment The Role of The Counsellor in NigeriaEfosaNessuna valutazione finora
- Oracle SOA Suite Oracle Containers For J2EE Feature Overview OC4JDocumento10 pagineOracle SOA Suite Oracle Containers For J2EE Feature Overview OC4JLuis YañezNessuna valutazione finora
- Presentation LI: Prepared by Muhammad Zaim Ihtisham Bin Mohd Jamal A17KA5273 13 September 2022Documento9 paginePresentation LI: Prepared by Muhammad Zaim Ihtisham Bin Mohd Jamal A17KA5273 13 September 2022dakmts07Nessuna valutazione finora
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldDa EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldValutazione: 4.5 su 5 stelle4.5/5 (55)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDa EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNessuna valutazione finora
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDa EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNessuna valutazione finora
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDa EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNessuna valutazione finora
- Generative AI: The Insights You Need from Harvard Business ReviewDa EverandGenerative AI: The Insights You Need from Harvard Business ReviewValutazione: 4.5 su 5 stelle4.5/5 (2)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldDa EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldValutazione: 4.5 su 5 stelle4.5/5 (107)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Da EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Valutazione: 4 su 5 stelle4/5 (1)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesDa EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesValutazione: 4.5 su 5 stelle4.5/5 (13)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewDa EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewValutazione: 4.5 su 5 stelle4.5/5 (104)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepDa EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepValutazione: 4.5 su 5 stelle4.5/5 (19)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Da EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Valutazione: 4 su 5 stelle4/5 (15)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkDa EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkValutazione: 4 su 5 stelle4/5 (7)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceDa EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceValutazione: 4.5 su 5 stelle4.5/5 (38)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziDa Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNessuna valutazione finora
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceDa EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceValutazione: 4 su 5 stelle4/5 (2)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeDa EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeValutazione: 4.5 su 5 stelle4.5/5 (69)
- Artificial Intelligence: A Guide for Thinking HumansDa EverandArtificial Intelligence: A Guide for Thinking HumansValutazione: 4.5 su 5 stelle4.5/5 (30)
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideDa EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideValutazione: 5 su 5 stelle5/5 (1)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsDa EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNessuna valutazione finora
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Da EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Nessuna valutazione finora
- Four Battlegrounds: Power in the Age of Artificial IntelligenceDa EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceValutazione: 5 su 5 stelle5/5 (5)