Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Trabalho de Dinâmica Dos Mecanismos 3ºav.
Caricato da
Rosana TaketaCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Trabalho de Dinâmica Dos Mecanismos 3ºav.
Caricato da
Rosana TaketaCopyright:
Formati disponibili
1
UNIVERSIDADE FEDERAL DO PAR
FACULDADE DE ENGENHARIA MECNICA
INSTITUTO DE TECNOLOGIA
CINEMTICA
Terceira avaliao de Dinmica dos Mecanismos
Alunos:
Anderson Luis Cordeiro Reis (10021001101)
Carlos Eduardo de Jesus Nascimento (10021004401)
Rosana Sumie do Rosrio Taketa (10021002201)
Mrio Jorge Ferreira Gomes (07021003901)
Daniel Cavalcante da Conceio (10021000701)
Fabio Douro de Souza (03021009601)
Belm/2013
2
Sumrio
1. Introduo 1
2. Justificativa 1
3. Aplicao do mtodo 1
4. Fundamentao teorica 1
4.1. Mecanismo biela-manivela de trs barras 2
4.2. Mecnismo de quatro-barras 4
5. Linha de comando do pragrama desenvolvido em Matlab 6
6. Resultados e comparao com o programa Working Model 15
7. Concluses 16
8. Referncias 17
1
1. Introduo
A anlise cinemtica e dinmica de mecnismos pode ser estudadas utilizando
softwares para simulao de modelos computacionais. Os modelos computacionais
conseguem simular, com timos resultados, diversos mecnismos. Neste trabalho foi
desenvolvido a anlise de mecanismos de quatro-barras e biela-manivela atravs da
programao por Matlab.
2. Justificativa
Ao utilizar a anlise computacional, podemos estudar diversos mecnismos sem
ter a preocupao de elaborar um modelo real desses mecanismos. A anlise
computacional relativamente barata, comparada a outras formas de anlise.
3. Aplicao do mtodo
Foi desenvolvido um programa no software Matlab para anlisar mecanismos de
quatro-barras e biela-manivela. O programa faz as anlises cinemticas e dinmicas
desses mecnismos utilizando o mtodo de soluo newtoniana, pois fornece mais
informaes sobre as foras internas.
Utilizando somente as leis de Newton, temos:
=
=
Separando as foras nos eixos X e Y e o torque no eixo Z, temos trs equaes
escalares:
=
=
As equaes so escritas para cada barra do mecnismo e o sistema de equaes
pode ser resolvido por metdo matrcial. Frequentemente o peso das barras
negligenciado, pois geralmente a acelerao cinemtica da barra bem maior que a
acelerao da gravidade.
4. Fundamentao teorica
Os mecnismos estudados sero biela-manivela de trs barras e mecanismo de
quatro-barras.
2
4.1. Mecanismo biela-manivela de trs barras
No mecnismo biela-manivela de trs barras apenas dois elos esto em
movimento. Como simplificao de um mecnismo de 4 barras o mecnismo biela-
manivela de trs barras tem o bloco guia substituido por uma meia junta, essa
substituio reduz o nmero de elos para trs. O elo 1 fixo e os elos 2 e 3 esto em
movimento. necessrio trs equaes para cada elo em movimento, totalizando seis
equaes e seis icognitas.
Mecnismo biela-manivela
Antes da anlise dinmica, deve-se fazer a anlise cinemtica. A anlise
cinemtica determina a acelerao angular e a acelerao linear do centro de gravidade
de cada elo, determinado pelo comprimento dos elos de pino a pino. Para a anlise
dinmica so necessrios a massa da barra (), localizao do centro de gravidade ()
e o momento de inrcia de massa (
).
A posio do centro de gravidade definido pelo vetor posio com ngulo
medido em relao a linha de centro da barra, com origem na junta pinada. A
localizao da fora resultante sempre no centro de gravidade e tem seu ngulo
medido em relao ao sistema de coodenadas local rotacionvel (SCLR) que paralelo
ao sistema de coordenadas global. A localizao do vetor posio de todosos pontos de
conexo, elos e os pontos de aplicao de foras externas devem ser definidos em
relao ao CSLNR do elo.
3
As equaes para a barra 2 so:
12
+
32
=
2
12
+
32
=
2
12
+(
12
12
12
12
) +(
32
32
32
32
) =
2
As equaes para a barra 3 so:
13
32
=
3
13
32
=
3
(
13
13
13
13
) (
23
32
23
32
) +(
) =
3
A barra 2 mostra as foras de cada junta pinada designadas de
12
e
32
, mas
obviamente existem forar iguais e opostas em cada um desses pinos, quais so
designados como
21
e
23
. Em relao a resoluo, os pares de foras escolhidas
arbitrria.
No pino que liga a barra 2 com a barra 3 temos uma fora atuante que contrria
a fora
32
, se a barra 3 estiver sendo analisada. Pelo efeito da ao e reao podemos
dizer que:
23
=
32
A fora P representa uma fora externa qualquer sobre a barra 3. Torque
12
s
entra na equao da barra 2, pois na barra 2 que h uma entrada de torque conhecida
no sistema.
Existem sete variveis em seis equaes,
12
,
12
,
32
,
32
,
13
,
13
,
12
.
Verificando a fora
13
possivel compreender que a
13
somente o atrito na junta
entre o o elo 3 e o elo 1. Podemos dizer que:
=
13
=
13
Substitundo nas equaes de movimento do elo 3:
13
32
=
3
13
32
=
3
(
13
13
13
13
) (
23
32
23
32
) =
3
(
)
4
Colocando as seis equaes em forma de matriz, obtemos
[
1 0 1 0 0 0
0 1 0 1 0 0
12
12
32
32
0 1
0 0 1 0 1 0
0 0 0 1 0
0 0
23
23
(
13
13
) 0
]
x
[
12
12
32
32
13
12
]
=
[
4.2. Mecnismo de quatro-barras
O mecnismo de quatro-barras possui trs elos em movimento. Cada elo ou
corpo rgido tem trs equaes de movimento. Para resolver as foras na articulao
necessrio que as fforas e torques aplicados sejam definidos para todas as posies de
interesse.
Mecnismo de quatro-barras
Os dados cinemticos so definidos em relao ao sistema de coordenadas
global, cuja a origem o piv motor. necessrio a massa, localizao do centro de
gravidade e o momento de inrcia de massa de cada barra. Como no mecanismo biela-
manivela o centro de gravidade definido em relao ao sistema de eixos mvel e
rotacionvel. A origem do sistema de eixos x, y a junta pinada, sendo o eixo x a
5
linha de centro dos elos. Os dados de cinemtica e fora aplicada diferem para cada
posio do mecanismo. O processo idntico para cada posio sucessiva.
As equaes da barra 2 so idnticas aos da biela-manivela, sendo:
12
+
32
=
2
12
+
32
=
2
12
+(
12
12
12
12
) +(
32
32
32
32
) =
2
Para a barra 3, substiruiremos a fora
23
pela fora
32
. Supondo uma
ao de fora externa, as equaes de movimento da barra 3 so:
43
32
=
3
43
32
=
3
(
43
43
43
43
) (
23
32
23
32
) +(
) =
3
Para a barra 4, ser substituida a fora
34
pela fora
43
assim podemos
escrever as equaes de movimento para a barra 4, essas so:
14
43
=
4
14
43
=
4
(
14
14
14
14
) (
34
43
34
43
) =
4
Existem nove incgnitas e nove equaes, podendo ser resolvida
simultaneamente. Arrumando os termos das equaes, podemos escrever a seguinte
matriz.
[
1 0 1 0 0 0 0 0 0
0 1 0 1 0 0 0 0 0
12
12
32
32
0 0 0 0 1
0 0 1 0 1 0 0 0 0
0 0 0 1 0 1 0 0 0
0 0
23
23
43
43
0 0 0
0 0 0 0 1 0 1 0 0
0 0 0 0 0 1 0 1 0
0 0 0 0
34
34
14
14
0
]
x
[
12
12
32
32
43
43
14
14
12
]
=
6
[
4 ]
5. Linha de comando do pragrama desenvolvido em Matlab
Os comandos desenvolvidos no Matlab so capazes de anlise cinemtica e
dinmica dos mecanismos propostos.
Linhas de comando do programa de biela-manivela:
clc,clear
format short
H=1;
Y=1;
if H==1
L2=input('Comprimento da barra 2 em mm: ');
L3=input('Comprimento da barra 3 em mm: ');
L4=0;
O4=1;
disp('Dados referente a barra 2')
O2=input('Angulo entre o eixo X e a linha de centro da barra 2 em graus: ');
W2=input('Velocidade angular na barra 2 em rad/s: ');
alfa2=input('acelerao angular da barra 2 em rad/s: ');
R12=input('Distancia do CG ao elo 1 em mm: ');
Or12=input('Angulo entre a Linha de centros e a linha do elo ao CG em graus: ');
E2=input('Digite o numero de foras atuante na barra 2: ');
Icm2=input('Momento de inercia barra 2 em kg.m: ');
m2=input('Massa da barra 2 em kg: ');
if E2==0
P21=0;
P22=0;
P23=0;
Op21=1;
Op22=1;
Op23=1;
Rp21=0;
Rp22=0;
Rp23=0;
Orp21=1;
Orp22=1;
Orp23=1;
elseif E2==1
P21=input('Digite a intensidade da fora na barra 2 em Newtons: ');
Op21=input('Digite o angulo da fora na barra 2 em graus : ');
Rp21=input('Digite a distancia entre o CG e a aplicao da fora 1 em mm: ');
Orp21=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X (global) em graus: ');
P22=0;
7
P23=0;
Op22=1;
Op23=1;
Rp22=0;
Rp23=0;
Orp22=1;
Orp23=1;
elseif E2==2
P21=input('Digite a intensidade da fora 1 na barra 2: ');
Op21=input('Digite o angulo da fora 1: ');
P22=input('Digite a intensidade da fora 2: ');
Op22=input('Digite o angulo da fora 2: ');
Rp21=input('Digite a distancia entre o CG e a aplicao da fora 1: ');
Orp21=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X (global): ');
Rp22=input('Digite a distancia entre o CG e a aplicao da fora 2: ');
Orp22=input('Angulo entre a linha do CG a aplicao da fora 2 e o eixo X (global): ');
Rp23=0;
Op23=1;
P23=0;
Orp23=0;
else E2==3
P21=input('Digite a intensidade da fora 1: ');
Op21=input('Digite o angulo da fora 1: ');
P22=input('Digite a intensidade da fora 2: ');
Op22=input('Digite o angulo da fora 2: ');
P23=input('Digite a intensidade da fora 3: ');
Op23=input('Digite o angulo da fora 3: ');
Rp21=input('Digite a distancia entre o CG e a aplicao da fora 1: ');
Orp21=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X global (global): ');
Rp22=input('Digite a distancia entre o CG e a aplicao da fora 2: ');
Orp22=input('Angulo entre a linha do CG a aplicao da fora 2 e o eixo X global (global): ');
Rp23=input('Digite a distancia entre o CG e a aplicao da fora 3: ');
Orp23=input('Angulo entre a linha do CG a aplicao da fora 3 e o eixo X global (global): ');
end
disp('Dados referentes a barra 3')
O3=input('Angulo entre o eixo X e a linha de centro da barra 3 em graus: ')
R23=input('Distancia do CG ao ponto 2: ');
Or23=input('Angulo entre a Linha de centros e o vetor 23 ao CG: ');
E3=input('Digite o numero de foras atuante na barra 3: ');
Icm3=input('Momento de inercia barra 3 em kg.m: ');
m3=input('Massa da barra 3 em kg: ');
alfa3=input('Acelerao angular da barra 3 rad/s: ')
mi=input('Coeficiente de atrito')
disp('Foras na Barra 3')
if E3==0
P31=0;
P32=0;
P33=0;
Op31=1;
Op32=1;
Op33=1;
Rp13=0;
Rp23=0;
Rp33=0;
Orp31=0;
Orp32=0;
Orp33=0;
elseif E3==1
P31=input('Digite a intensidade da fora na barra 3: ');
Op31=input('Digite o angulo da fora na barra 3: ');
8
Rp31=input('Digite a distancia entre o CG e a aplicao da fora: ');
Orp31=input('Angulo entre a linha do CG a aplicao da fora e o eixo X (global): ');
P32=0;
P33=0;
Op32=1;
Op33=1;
Rp23=0;
Rp32=0;
Rp33=0;
Orp32=1;
Orp33=1;
elseif E3==2
P31=input('Digite a intensidade da fora 1 na barra 3: ');
Op31=input('Digite o angulo da fora 1 na barra 3: ');
P32=input('Digite a intensidade da fora 2 na barra 3: ');
Op32=input('Digite o angulo da fora 2 na barra 3: ');
Rp31=input('Digite a distancia entre o CG e a aplicao da fora: ');
Orp31=input('Angulo entre a linha do CG a aplicao da fora e o eixo X (global): ');
Rp32=input('Digite a distancia entre o CG e a aplicao da fora: ');
Orp32=input('Angulo entre a linha do CG a aplicao da fora e o eixo X (global): ');
P33=0;
Op33=1;
Rp33=0;
Orp33=1;
else E3==3
P31=input('Digite a intensidade da fora 1 na barra 3: ');
Op31=input('Digite o angulo da fora 1 na barra 3: ');
P32=input('Digite a intensidade da fora 2 na barra 3: ');
Op32=input('Digite o angulo da fora 2 na barra 3: ');
P33=input('Digite a intensidade da fora 3 na barra 3: ');
Op33=input('Digite o angulo da fora 3 na barra 3: ');
Rp31=input('Digite a distancia entre o CG e a aplicao da fora 1: ');
Orp31=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X (global): ');
Rp32=input('Digite a distancia entre o CG e a aplicao da fora 2: ');
Orp32=input('Angulo entre a linha do CG a aplicao da fora 2 e o eixo X (global): ');
Rp33=input('Digite a distancia entre o CG e a aplicao da fora 3: ');
Orp33=input('Angulo entre a linha do CG a aplicao da fora 3 e o eixo X (global): ');
end
%Calculo Analise da posio (comp)%
%Calculo de indices%
A=[0;0];
B=[L2*cos(O2*pi/180);L2*sin(O2*pi/180)];
Bx=B(1,1);
By=B(2,1);
%Analise cinemtica%
%Barra 3%
W3=-((L2*W2)/L3)*((sin((O2)*pi/180))/(sin((O3)*pi/180)))
%acelerao lineares%
acm2x=(-R12*W2^2*cos(O2*pi/180+Or12*pi/180)-R12*alfa2*sin(O2*pi/180+Or12*pi/180))/10^3
acm2y=(-R12*W2^2*sin(O2*pi/180+Or12*pi/180)-R12*alfa2*cos(O2*pi/180+Or12*pi/180))/10^3
acm3x=(-L2*W2^2*cos(O2*pi/180)-L2*alfa2*sin(O2*pi/180)-
R23*W3^2*cos(O3*pi/180+Or23*pi/180)-R23*alfa3*sin(O3*pi/180+Or23*pi/180))/10^3
acm3y=(-L2*W2^2*sin(O2*pi/180)+L2*alfa2*cos(O2*pi/180)-
R23*W3^2*sin(O3*pi/180+Or23*pi/180)+R23*alfa3*cos(O3*pi/180+Or23*pi/180))/10^3
%Esforoes Externos %
Rp21x=Rp21*cos(Orp31*pi/180);
Rp21y=Rp21*sin(Orp31*pi/180);
Rp22x=Rp22*cos(Orp31*pi/180);
Rp22y=Rp22*sin(Orp31*pi/180);
9
Rp23x=Rp23*cos(Orp31*pi/180);
Rp23y=Rp23*sin(Orp31*pi/180);
Rp31x=Rp31*cos(Orp31*pi/180);
Rp31y=Rp31*sin(Orp31*pi/180);
Rp32x=Rp32*cos(Orp31*pi/180);
Rp32y=Rp32*sin(Orp31*pi/180);
Rp33x=Rp33*cos(Orp31*pi/180);
Rp33y=Rp33*sin(Orp31*pi/180);
P21x=P21*cos(Op21*pi/180);
P21y=P21*sin(Op21*pi/180);
P22x=P22*cos(Op22*pi/180);
P22y=P22*sin(Op22*pi/180);
P23x=P23*cos(Op23*pi/180);
P23y=P23*sin(Op23*pi/180);
P31x=P31*cos(Op31*pi/180);
P31y=P31*sin(Op31*pi/180);
P32x=P32*cos(Op32*pi/180);
P32y=P32*sin(Op32*pi/180);
P33x=P33*cos(Op33*pi/180);
P33y=P33*sin(Op33*pi/180);
R12x=-R12/10^3*cos(O2*pi/180+Or12*pi/180);
R12y=-R12/10^3*sin(O2*pi/180+Or12*pi/180);
R32x=L2/10^3*cos(O2*pi/180)-R12/10^3*cos(O2*pi/180+Or12*pi/180);
R32y=L2/10^3*sin(O2*pi/180)-R12/10^3*sin(O2*pi/180+Or12*pi/180);
R23x=-R23/10^3*cos(O3*pi/180+Or23*pi/180);
R23y=-R23/10^3*sin(O3*pi/180+Or23*pi/180);
R13x=L3/10^3*cos(O3*pi/180)-R23/10^3*cos(O3*pi/180+Or23*pi/180);
R13y=L3/10^3*sin(O3*pi/180)-R23/10^3*sin(O3*pi/180+Or23*pi/180);
%Matriz J Coeficientes%
J=[1 0 1 0 0 0
0 1 0 1 0 0
-R12y R12x -R32y R32x 0 1
0 0 -1 0 1 0
0 0 0 -1 mi 0
0 0 R23y -R23x (mi*R13x-R13y) 0]
%Matriz X incognitas%
%X=[F12x;F12y;F32x;F32y;F43x;F43y;F14x;F14y;T12]
%Matriz K%
g=(-Rp21x*P21y+Rp21y*P21x-Rp22x*P22y+Rp22y*P22x-Rp23x*P23y+Rp23y*P23x-
Rp31x*P31y+Rp31y*P31x-Rp32x*P32y+Rp32y*P32x-Rp33x*P33y+Rp33y*P33x)/10^3;
K=[m2*acm2x
m2*acm2y
Icm2*alfa2
m3*acm3x-P21x-P22x-P23x-P31x-P32x-P33x
m3*acm3y-P21y-P22y-P23y-P31y-P32y-P33y
Icm3*alfa3+g]
X=J\K;
F12x=X(1,1)
F12y=X(2,1)
F32x=X(3,1)
F32y=X(4,1)
F13x=X(5,1)
T12=X(6,1)
elseif Q==2
disp(' ')
end
10
Linhas de comando do programa para o mecanismo de quatro-barras:
clc,clear
format short
H=1;
Y=input('digite 1 para mecanismo aberto ou 2 para Cruzado ');
if H==1
L1=input('Comprimento da "barra" "imaginaria em mm : " ');
L2=input('Comprimento da barra 2 em mm: ');
L3=input('Comprimento da barra 3 em mm: ');
L4=input('Comprimento da barra 4 em mm: ');
L=[L1;L2;L3;L4];
if 2*max(L)+2*min(L)<=L1+L2+L3+L4
disp('')
else 2*max(L)+2*min(L)>=L1+L2+L3+L4
disp('Mecanismo no possivel... Rever comprimentos das barras')
break
end
disp('Dados referente a barra 2')
O2=input('Angulo entre o eixo X e a linha de centro da barra 2 em graus: ');
W2=input('Velocidade angular na barra 2 em rad/s: ');
R12=input('Distancia do CG ao elo 1 em mm: ');
Or12=input('Angulo entre a Linha de centros e a linha do elo ao CG em graus: ');
E2=input('Digite o numero de foras atuante na barra 2: ');
Icm2=input('Momento de inercia barra 2 em kg.m: ');
m2=input('Massa da barra 2 em kg: ');
alfa2=input('Acelerao angular na barra 2 em rad/s: ');
if E2==0
P21=0;
P22=0;
P23=0;
Op21=1;
Op22=1;
Op23=1;
Rp21=0;
Rp22=0;
Rp23=0;
Orp21=1;
Orp22=1;
Orp23=1;
elseif E2==1
P21=input('Digite a intensidade da fora na barra 2: ');
Op21=input('Digite o angulo da fora na barra 2: ');
Rp21=input('Digite a distancia entre o CG e a aplicao da fora 1: ');
Orp21=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X (rotacional): ');
P22=0;
P23=0;
Op22=1;
Op23=1;
Rp22=0;
Rp23=0;
Orp22=1;
Orp23=1;
elseif E2==2
P21=input('Digite a intensidade da fora 1 na barra 2: ');
Op21=input('Digite o angulo da fora 1: ');
11
P22=input('Digite a intensidade da fora 2: ');
Op22=input('Digite o angulo da fora 2: ');
Rp21=input('Digite a distancia entre o CG e a aplicao da fora 1: ');
Orp21=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X (rotacional): ');
Rp22=input('Digite a distancia entre o CG e a aplicao da fora 2: ');
Orp22=input('Angulo entre a linha do CG a aplicao da fora 2 e o eixo X (rotacional): ');
Rp23=0;
Op23=1;
P23=0;
Orp23=0;
else E2==3
P21=input('Digite a intensidade da fora 1: ');
Op21=input('Digite o angulo da fora 1: ');
P22=input('Digite a intensidade da fora 2: ');
Op22=input('Digite o angulo da fora 2: ');
P23=input('Digite a intensidade da fora 3: ');
Op23=input('Digite o angulo da fora 3: ');
Rp21=input('Digite a distancia entre o CG e a aplicao da fora 1: ');
Orp21=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X (rotacional): ');
Rp22=input('Digite a distancia entre o CG e a aplicao da fora 2: ');
Orp22=input('Angulo entre a linha do CG a aplicao da fora 2 e o eixo X (rotacional): ');
Rp23=input('Digite a distancia entre o CG e a aplicao da fora 3: ');
Orp23=input('Angulo entre a linha do CG a aplicao da fora 3 e o eixo X (rotacional): ');
end
disp('Dados referentes a barra 3')
R23=input('Distancia do CG ao ponto B: ');
Or23=input('Angulo entre a Linha de centros e a linha do ponto B ao CG: ');
E3=input('Digite o numero de foras atuante na barra 3: ');
Icm3=input('Momento de inercia barra 3: ');
m3=input('Massa da barra 3: ');
disp('Foras na Barra 3: ')
if E3==0
P31=0;
P32=0;
P33=0;
Op31=1;
Op32=1;
Op33=1;
Rp13=0;
Rp23=0;
Rp33=0;
Orp31=0;
Orp32=0;
Orp33=0;
elseif E3==1
P31=input('Digite a intensidade da fora na barra 3: ');
Op31=input('Digite o angulo da fora na barra 3: ');
Rp31=input('Digite a distancia entre o CG e a aplicao da fora');
Orp31=input('Angulo entre a linha do CG a aplicao da fora e o eixo X (rotacional): ');
P32=0;
P33=0;
Op32=1;
Op33=1;
Rp23=0;
Rp32=0;
Rp33=0;
Orp32=1;
Orp33=1;
elseif E3==2
P31=input('Digite a intensidade da fora 1 na barra 3: ');
12
Op31=input('Digite o angulo da fora 1 na barra 3: ');
P32=input('Digite a intensidade da fora 2 na barra 3: ');
Op32=input('Digite o angulo da fora 2 na barra 3: ');
Rp31=input('Digite a distancia entre o CG e a aplicao da fora: ');
Orp31=input('Angulo entre a linha do CG a aplicao da fora e o eixo X (rotacional): ');
Rp32=input('Digite a distancia entre o CG e a aplicao da fora: ');
Orp32=input('Angulo entre a linha do CG a aplicao da fora e o eixo X (rotacional): ');
P33=0;
Op33=1;
Rp33=0;
Orp33=1;
else E3==3
P31=input('Digite a intensidade da fora 1 na barra 3: ');
Op31=input('Digite o angulo da fora 1 na barra 3: ');
P32=input('Digite a intensidade da fora 2 na barra 3: ');
Op32=input('Digite o angulo da fora 2 na barra 3: ');
P33=input('Digite a intensidade da fora 3 na barra 3: ');
Op33=input('Digite o angulo da fora 3 na barra 3: ');
Rp31=input('Digite a distancia entre o CG e a aplicao da fora 1: ');
Orp31=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X (rotacional): ');
Rp32=input('Digite a distancia entre o CG e a aplicao da fora 2: ');
Orp32=input('Angulo entre a linha do CG a aplicao da fora 2 e o eixo X (rotacional): ');
Rp33=input('Digite a distancia entre o CG e a aplicao da fora 3: ');
Orp33=input('Angulo entre a linha do CG a aplicao da fora 3 e o eixo X (rotacional): ');
end
disp('Dados referentes a barra 4')
R14=input('Distancia do CG ao ponto D: ');
Or14=input('Angulo entre a Linha de centros e a linha do ponto D ao CG: ');
E4=input('Digite o numero de foras atuante na barra 4: ');
T4=input('Torque externo na barra 4: ');
Icm4=input('Momento de inercia barra 4: ');
m4=input('Massa da barra 4 ');
disp('Foras na Barra 4')
if E4==0
P41=0;
P42=0;
P43=0;
Op41=1;
Op42=1;
Op43=1;
Rp41=0;
Rp42=0;
Rp43=0;
Orp41=1;
Orp42=1;
Orp43=1;
elseif E4==1
P41=input('Digite a intensidade da fora na barra 4: ');
Op41=input('Digite o angulo da fora na barra 3: ');
Rp41=input('Digite a distancia entre o CG e a aplicao da fora 1: ')
Orp41=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X: ');
P42=0;
P43=0;
Rp42=0;
Rp43=0;
Orp42=1;
Orp43=1;
elseif E4==2
P41=input('Digite a intensidade da fora 1 na barra 4: ');
Op41=input('Digite o angulo da fora 1 na barra 4: ');
13
P42=input('Digite a intensidade da fora 2 na barra 4: ');
Op42=input('Digite o angulo da fora 2 na barra 4: ');
Rp41=input('Digite a distancia entre o CG e a aplicao da fora 1: ');
Rp42=input('Digite a distancia entre o CG e a aplicao da fora 2: ');
P43=0;
Op43=1;
Rp43=0;
Orp41=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X: ');
Orp42=input('Angulo entre a linha do CG a aplicao da fora 2 e o eixo X: ');
Orp43=1;
else E4==3
P41=input('Digite a intensidade da fora 1 na barra 4: ');
Op41=input('Digite o angulo da fora 1 na barra 4: ');
P42=input('Digite a intensidade da fora 2 na barra 4: ');
Op42=input('Digite o angulo da fora 2 na barra 4: ');
P43=input('Digite a intensidade da fora 3 na barra 4: ');
Op43=input('Digite o angulo da fora 3 na barra 4: ');
Rp41=input('Digite a distancia entre o CG e a aplicao da fora 1: ');
Rp42=input('Digite a distancia entre o CG e a aplicao da fora 2: ');
Rp43=input('Digite a distancia entre o CG e a aplicao da fora 3: ');
Orp41=input('Angulo entre a linha do CG a aplicao da fora 1 e o eixo X: ');
Orp42=input('Angulo entre a linha do CG a aplicao da fora 2 e o eixo X: ');
Orp43=input('Angulo entre a linha do CG a aplicao da fora 3 e o eixo X: ');
end
%Calculo Analise da posio (comp)%
%Calculo de indices%
A=[0;0]
B=[L2*cos(O2*pi/180);L2*sin(O2*pi/180)]
Bx=B(1,1);
By=B(2,1);
S=(L2^2-L3^2+L4^2-L1^2)/(2*(Bx-L1));
P=(By^2/(Bx-L1)^2)+1;
Q=(2*By*(L1-S))/(Bx-L1);
R=(L1-S)^2-L4^2;
if Y==1
Cy=(-Q+sqrt(Q^2-4*P*R))/(2*P);
else Y==2
Cy=(-Q-sqrt(Q^2-4*P*R))/(2*P);
end
Cx=S-((2*By*Cy)/(2*(Bx-L1)));
if Y==1
O3=atan((Cy-By)/(Cx-Bx))*180/pi
else Y==2
O3=360+atan((Cy-By)/(Cx-Bx))*180/pi
end
C=[Cx;Cy]
O4=atan(Cy/(Cx-L1))*180/pi+180
%Analise cinemtica%
%Barra 3%
a=L4*sin(O4*pi/180);
b=L3*sin(O3*pi/180);
d=L4*cos(O4*pi/180);
e=L3*cos(O3*pi/180);
W3=((L2*W2)/L3)*((sin((O4-O2)*pi/180))/(sin((O3-O4)*pi/180)))
W4=((L2*W2)/L4)*((sin((O2-O3)*pi/180))/(sin((O4-O3)*pi/180)))
f=L2*alfa2*cos(O2*pi/180)-L2*W2^2*sin(O2*pi/180)-
L3*W3^2*sin(O3*pi/180)+L4*W4^2*sin(O4*pi/180);
c=L2*alfa2*sin(O2*pi/180)+L2*W2^2*cos(O2*pi/180)+L3*W3^2*cos(O3*pi/180)-
L4*W4^2*cos(O4*pi/180);
alfa3=(c*d-a*f)/(a*e-b*d)
14
alfa4=(c*e-b*f)/(a*e-b*d)
%acelerao lineares%
acm2x=(-R12*W2^2*cos(O2*pi/180+Or12*pi/180)-R12*alfa2*sin(O2*pi/180+Or12*pi/180))/10^3
acm2y=(-R12*W2^2*sin(O2*pi/180+Or12*pi/180)-R12*alfa2*cos(O2*pi/180+Or12*pi/180))/10^3
acm3x=(-L2*W2^2*cos(O2*pi/180)-L2*alfa2*sin(O2*pi/180)-
R23*W3^2*cos(O3*pi/180+Or23*pi/180)-R23*alfa3*sin(O3*pi/180+Or23*pi/180))/10^3
acm3y=(-L2*W2^2*sin(O2*pi/180)+L2*alfa2*cos(O2*pi/180)-
R23*W3^2*sin(O3*pi/180+Or23*pi/180)+R23*alfa3*cos(O3*pi/180+Or23*pi/180))/10^3
acm4x=(-R14*W4^2*cos(O4*pi/180+Or14*pi/180)-R14*alfa4*sin(O4*pi/180+Or14*pi/180))/10^3
acm4y=(-R14*W4^2*sin(O4*pi/180+Or14*pi/180)+R14*alfa4*cos(O4*pi/180+Or14*pi/180))/10^3
%Esforoes Externos %
Rp21x=Rp21*cos(O2*pi/180+Orp21*pi/180);
Rp21y=Rp21*sin(O2*pi/180+Orp21*pi/180);
Rp22x=Rp22*cos(O2*pi/180+Orp22*pi/180);
Rp22y=Rp22*sin(O2*pi/180+Orp22*pi/180);
Rp23x=Rp23*cos(O2*pi/180+Orp23*pi/180);
Rp23y=Rp23*sin(O2*pi/180+Orp23*pi/180);
Rp31x=Rp31*cos(O3*pi/180+Orp31*pi/180);
Rp31y=Rp31*sin(O3*pi/180+Orp31*pi/180);
Rp32x=Rp32*cos(O3*pi/180+Orp32*pi/180);
Rp32y=Rp32*sin(O3*pi/180+Orp32*pi/180);
Rp33x=Rp33*cos(O3*pi/180+Orp33*pi/180);
Rp33y=Rp33*sin(O3*pi/180+Orp33*pi/180);
Rp41x=Rp41*cos(O4*pi/180+Orp41*pi/180);
Rp41y=Rp41*sin(O4*pi/180+Orp41*pi/180);
Rp42x=Rp42*cos(O4*pi/180+Orp42*pi/180);
Rp42y=Rp42*sin(O4*pi/180+Orp42*pi/180);
Rp43x=Rp43*cos(O4*pi/180+Orp43*pi/180);
Rp43y=Rp43*sin(O4*pi/180+Orp43*pi/180);
P21x=P21*cos(Op21*pi/180);
P21y=P21*sin(Op21*pi/180);
P22x=P22*cos(Op22*pi/180);
P22y=P22*sin(Op22*pi/180);
P23x=P23*cos(Op23*pi/180);
P23y=P23*sin(Op23*pi/180);
P31x=P31*cos(Op31*pi/180);
P31y=P31*sin(Op31*pi/180);
P32x=P32*cos(Op32*pi/180);
P32y=P32*sin(Op32*pi/180);
P33x=P33*cos(Op33*pi/180);
P33y=P33*sin(Op33*pi/180);
P41x=P41*cos(Op41*pi/180);
P41y=P41*sin(Op41*pi/180);
P42x=P42*cos(Op42*pi/180);
P42y=P42*sin(Op42*pi/180);
P43x=P43*cos(Op43*pi/180);
P43y=P43*sin(Op43*pi/180);
R12x=-R12/10^3*cos(O2*pi/180+Or12*pi/180);
R12y=-R12/10^3*sin(O2*pi/180+Or12*pi/180);
R32x=L2/10^3*cos(O2*pi/180)-R12/10^3*cos(O2*pi/180+Or12*pi/180);
R32y=L2/10^3*sin(O2*pi/180)-R12/10^3*sin(O2*pi/180+Or12*pi/180);
R23x=-R23/10^3*cos(O3*pi/180+Or23*pi/180);
R23y=-R23/10^3*sin(O3*pi/180+Or23*pi/180);
R43x=L3/10^3*cos(O3*pi/180)-R23/10^3*cos(O3*pi/180+Or23*pi/180);
R43y=L3/10^3*sin(O3*pi/180)-R23/10^3*sin(O3*pi/180+Or23*pi/180);
R14x=-R14/10^3*cos(O4*pi/180-Or14*pi/180);
R14y=-R14/10^3*sin(O4*pi/180-Or14*pi/180);
R34x=L4/10^3*cos(O4*pi/180)-R14/10^3*cos(O4*pi/180-Or14*pi/180);
15
R34y=L4/10^3*sin(O4*pi/180)-R14/10^3*sin(O4*pi/180-Or14*pi/180);
%Matriz J Coeficientes%
J=[1 0 1 0 0 0 0 0 0
0 1 0 1 0 0 0 0 0
-R12y R12x -R32y R32x 0 0 0 0 1
0 0 -1 0 1 0 0 0 0
0 0 0 -1 0 1 0 0 0
0 0 R23y -R23x -R43y R43x 0 0 0
0 0 0 0 -1 0 1 0 0
0 0 0 0 0 -1 0 1 0
0 0 0 0 R34y -R34x -R14y R14x 0]
%Matriz X incognitas%
%X=[F12x;F12y;F32x;F32y;F43x;F43y;F14x;F14y;T12]
%Matriz K%
g=(-Rp21x*P21y+Rp21y*P21x-Rp22x*P22y+Rp22y*P22x-Rp23x*P23y+Rp23y*P23x-
Rp31x*P31y+Rp31y*P31x-Rp32x*P32y+Rp32y*P32x-Rp33x*P33y+Rp33y*P33x-
Rp41x*P41y+Rp41y*P41x-Rp42x*P42y+Rp42y*P42x-Rp43x*P43y+Rp43y*P43x)/10^3;
K=[m2*acm2x
m2*acm2y
Icm2*alfa2
m3*acm3x-P21x-P22x-P23x-P31x-P32x-P33x-P41x-P42x-P43x
m3*acm3y-P21y-P22y-P23y-P31y-P32y-P33y-P41y-P42y-P43y
Icm3*alfa3+g
m4*acm4x
m4*acm4y
Icm4*alfa4-T4]
X=J\K;
F12x=X(1,1)
F12y=X(2,1)
F32x=X(3,1)
F32y=X(4,1)
F43x=X(5,1)
F43y=X(6,1)
F14x=X(7,1)
F14y=X(8,1)
T12=X(9,1)
elseif Q==2
disp(' ')
end
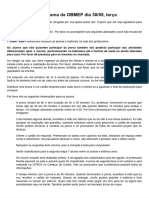
6. Resultados e comparao com o programa Working Model
O programa Working Model capaz de simular diversos mecanismo utilizando
diversos elementos de mquinas. Foi simulado um mecanismo de quatro-barras no
working model e em seguida os dados foram comparado com os resultados do programa
obtidos pelo programa desenvolvido em Matlab.
16
O mecanismo simulado no Working Model foi o seguinte:
Infelizmente os resultados obtidos pelo programa em Matlab no se igualaram
ao resultado do programa Working Model. Houve dificuldade em simular corretamente
um mecanismo de quatro-barras no Working Model, pois a medio de ngulos e
comprimentos das barras poligonais, principalmente em relao ao centro de massa da
barra, so de difcil verificao.
O programa foi testado para resoluo dos problemas resolvidos no livro
Robert L. Norton, Cinematica e Dinanmica dos Mecanismos. Os resultados foram
idnticos aos resultados apresentados no livro para o mecanismo biela-manivela de trs
barras e o mecanismo de quatro-barras.
7. Concluses
O programa desenvolvido em Matlab foi capaz de resolver as foras para os
mecanismos propostos com timos resultados. O programa Working Model um
programa com capacidade de simulao impressionante, podendo simular uma grande
variedade de mecanismos, que torna o programa em uma excelente ferramenta de
anlise.
17
Os modelos computacionais economizam tempo e dinheiro quando se precisa
simular o comportamento dos mais diversos mecanismos.
8. Referncias
HARTOG, J. P. D. Mechanical vibrations. 2 ed. New York: Dover Publications, Inc.,
1985.
NORTON, R. L. Cinematica e dinamica dos mecanismos. 1 ed. Porto Alegre: Editora
McGraw-Hill, 2010.
NORTON, R. L. Projeto de Maquinas: Uma abordagem integrada. 2 ed. Porto Alegre:
Editora
Bookman, 2004.
Potrebbero piacerti anche
- Lei Salario Minimo ProfissionalDocumento1 paginaLei Salario Minimo ProfissionalGeovani FranzenNessuna valutazione finora
- CLP - Controlador Lógico Programável ENTRADAS DIG. E ANAL.Documento63 pagineCLP - Controlador Lógico Programável ENTRADAS DIG. E ANAL.filaconNessuna valutazione finora
- Lei Salario Minimo ProfissionalDocumento1 paginaLei Salario Minimo ProfissionalGeovani FranzenNessuna valutazione finora
- PB 14 00973616407 1118067783885Documento12 paginePB 14 00973616407 1118067783885André Luis ComonianGarciaNessuna valutazione finora
- Trabalho de Dinâmica Dos Mecanismos 3ºav.Documento19 pagineTrabalho de Dinâmica Dos Mecanismos 3ºav.Rosana TaketaNessuna valutazione finora
- Refrigeração Industrial (LIVRO COMPLETO) - Jabardo - e - Stoecker PDFDocumento384 pagineRefrigeração Industrial (LIVRO COMPLETO) - Jabardo - e - Stoecker PDFLino Alves Inácio100% (1)
- CLP - Controlador Lógico Programável ENTRADAS DIG. E ANAL.Documento63 pagineCLP - Controlador Lógico Programável ENTRADAS DIG. E ANAL.filaconNessuna valutazione finora
- Trabalho de Dinâmica Dos Mecanismos 3ºav.Documento19 pagineTrabalho de Dinâmica Dos Mecanismos 3ºav.Rosana TaketaNessuna valutazione finora
- Resident Evil 1 Jill Valentine Parte 1Documento15 pagineResident Evil 1 Jill Valentine Parte 1DavidNessuna valutazione finora
- Exercícios Resolvidos: Raiz ComplexaDocumento4 pagineExercícios Resolvidos: Raiz ComplexaDiego OliveiraNessuna valutazione finora
- Monitores CRTDocumento50 pagineMonitores CRTRodrigomsoaresNessuna valutazione finora
- Seccionalizador trifásico SF6 isola falhasDocumento8 pagineSeccionalizador trifásico SF6 isola falhasWilson Albert Ramos GuerrerosNessuna valutazione finora
- Slides01 DesenvolvimentoWebDocumento43 pagineSlides01 DesenvolvimentoWebFelipe TardivoNessuna valutazione finora
- Propagação via satélite em Banda KuDocumento20 paginePropagação via satélite em Banda KuIsrael FrankeNessuna valutazione finora
- Segurança Cibernética - Propriedades e PrincípiosDocumento63 pagineSegurança Cibernética - Propriedades e PrincípiosTriploc MarquesNessuna valutazione finora
- AR F.21 - Lista de Partidas em Aberto Do ClienteDocumento4 pagineAR F.21 - Lista de Partidas em Aberto Do ClienteValdevy PiresNessuna valutazione finora
- Informática Aplicada à ModaDocumento47 pagineInformática Aplicada à ModaRejane WronowskiNessuna valutazione finora
- Cronograma Da OBMEP - Documentos GoogleDocumento56 pagineCronograma Da OBMEP - Documentos GoogleMarilia MottaNessuna valutazione finora
- SKF SNL 3044 G + C 3044 SpecificationDocumento5 pagineSKF SNL 3044 G + C 3044 SpecificationHenrique FrancoNessuna valutazione finora
- NBR Iso 12207 PDFDocumento35 pagineNBR Iso 12207 PDFMauro Mendes100% (2)
- Curso Livre - AutoCAD 2018 - Professional - Senac São PauloDocumento3 pagineCurso Livre - AutoCAD 2018 - Professional - Senac São PauloDenner Melo FreitasNessuna valutazione finora
- Peças Sulcador Beija-FlorDocumento7 paginePeças Sulcador Beija-FlorVadinho BenezNessuna valutazione finora
- PA-431 - Aspectos Ambientais-V2Documento4 paginePA-431 - Aspectos Ambientais-V2fabioNessuna valutazione finora
- Web CamDocumento9 pagineWeb CamMarcos Moura RamosNessuna valutazione finora
- Como Aplicar A LGPD em Sua Organização - Sandro OliveiraDocumento250 pagineComo Aplicar A LGPD em Sua Organização - Sandro OliveiraThiago Mele Marketing DigitalNessuna valutazione finora
- Evolução Da Tecnologia - História, Resumo, Linha Do TempoDocumento3 pagineEvolução Da Tecnologia - História, Resumo, Linha Do TempoRodrigo Ramón Falconi GómezNessuna valutazione finora
- Manual de Configuração REMUX IS720LADocumento15 pagineManual de Configuração REMUX IS720LAEngenhariaNessuna valutazione finora
- Switch 3comDocumento13 pagineSwitch 3comThais RamosNessuna valutazione finora
- Banco de Dados I - Transações e Controle de ConcorrênciaDocumento39 pagineBanco de Dados I - Transações e Controle de Concorrênciamfomoura1Nessuna valutazione finora
- Leonardo Medeiros Trujillo - 30996896Documento3 pagineLeonardo Medeiros Trujillo - 30996896Wagner LimaNessuna valutazione finora
- Carta ABES val. 15.06.24Documento5 pagineCarta ABES val. 15.06.24Júnio JorgeNessuna valutazione finora
- SISTEMAS GERENCIAIS E PROCESSOSDocumento5 pagineSISTEMAS GERENCIAIS E PROCESSOSSilvanoNessuna valutazione finora
- Afiliados Hotmart Como Eu Devo Fazer - (Guia Completo) .Documento10 pagineAfiliados Hotmart Como Eu Devo Fazer - (Guia Completo) .Claudio Gomes Silva LeiteNessuna valutazione finora
- Uma visão do DMBOKDocumento46 pagineUma visão do DMBOKEveraldo ChavesNessuna valutazione finora
- ABAA - Depreciação Do Ativo Fixo - Depreciação ExtraordiáriaDocumento4 pagineABAA - Depreciação Do Ativo Fixo - Depreciação ExtraordiáriaLaura NunesNessuna valutazione finora
- Exercicios MicrocontroladoresDocumento13 pagineExercicios MicrocontroladoresRobson CastroNessuna valutazione finora
- Aula 8Documento12 pagineAula 8Nelson Hosten AliNessuna valutazione finora
- Amd690gm M2Documento16 pagineAmd690gm M2kakitosNessuna valutazione finora