Potrebbero piacerti anche
- Modern Intelligent Instruments - Theory and ApplicationDa EverandModern Intelligent Instruments - Theory and ApplicationNessuna valutazione finora
- Real-Time Simulation Technology for Modern Power ElectronicsDa EverandReal-Time Simulation Technology for Modern Power ElectronicsNessuna valutazione finora
- BLDC Sinusoidal ControlDocumento6 pagineBLDC Sinusoidal ControlOctavian MîrţiNessuna valutazione finora
- ProteusDocumento8 pagineProteusChinnu RS100% (1)
- Password Protected Circuit Breaker: Audisankara Institute of TechnologyDocumento22 paginePassword Protected Circuit Breaker: Audisankara Institute of TechnologyGokul SriramNessuna valutazione finora
- Over Under Voltage and Over Current Protection SystemDocumento8 pagineOver Under Voltage and Over Current Protection SystemHassan AliNessuna valutazione finora
- ALLEN-BRADLEY'S POWER SYSTEM HARMONICS (A Reference Guide To Causes, Effects and Corrective Measures)Documento14 pagineALLEN-BRADLEY'S POWER SYSTEM HARMONICS (A Reference Guide To Causes, Effects and Corrective Measures)Alda EnglandNessuna valutazione finora
- DSPDocumento77 pagineDSPVikas YadavNessuna valutazione finora
- Arduino Based Underground and Overhead Cable Fault DetectionDocumento7 pagineArduino Based Underground and Overhead Cable Fault DetectionUmair Mansoor100% (1)
- Bootloader PDFDocumento2 pagineBootloader PDFAyush Kumar100% (1)
- The Design and Formula of DC To DC Converter SmpsDocumento9 pagineThe Design and Formula of DC To DC Converter Smpsdewidewi76Nessuna valutazione finora
- How An Smps Works: Rectifier StageDocumento7 pagineHow An Smps Works: Rectifier StageImran AshrafNessuna valutazione finora
- LabVIEW Interface For Arduino Setup ProcedureDocumento13 pagineLabVIEW Interface For Arduino Setup ProcedureNoe Vidal AspeitiaNessuna valutazione finora
- 24.bus Detection Device For The Blind People Using Rfid.Documento2 pagine24.bus Detection Device For The Blind People Using Rfid.Shubham AggarwalNessuna valutazione finora
- Nokia 6100 LCD Display DriverDocumento35 pagineNokia 6100 LCD Display DriverNikhil HandeNessuna valutazione finora
- MPPT Solar Charge ControllerDocumento21 pagineMPPT Solar Charge ControlleranupamdubeyNessuna valutazione finora
- Self Stabilized Platform PDFDocumento4 pagineSelf Stabilized Platform PDFAnurag RanaNessuna valutazione finora
- Mini-Project I-Led Flasher ReportDocumento8 pagineMini-Project I-Led Flasher ReportAtiqMarwatNessuna valutazione finora
- Designing A PC Based Oscilloscope Using Arduino-1557Documento3 pagineDesigning A PC Based Oscilloscope Using Arduino-1557neneanaieNessuna valutazione finora
- Monitoring and Controling of Remote Industrial PlantDocumento15 pagineMonitoring and Controling of Remote Industrial PlantraghuNessuna valutazione finora
- Stepper Motor Speed Control Using FPGADocumento14 pagineStepper Motor Speed Control Using FPGASonaliNessuna valutazione finora
- Commutation Circuits PDFDocumento2 pagineCommutation Circuits PDFRalphNessuna valutazione finora
- SVPWM PDFDocumento5 pagineSVPWM PDFmauricetappaNessuna valutazione finora
- Implementing A Bootloader For The PIC16F87X: OperationDocumento24 pagineImplementing A Bootloader For The PIC16F87X: Operationboslim1580100% (1)
- PIC Microcontrollers Have 10 BIT ADCDocumento4 paginePIC Microcontrollers Have 10 BIT ADCveerakumarsNessuna valutazione finora
- Discovery of BLDC Motor: Brushless vs. Brushed DC MotorDocumento9 pagineDiscovery of BLDC Motor: Brushless vs. Brushed DC MotorNoni MaheshwariNessuna valutazione finora
- Summer Training Embedded SystemDocumento18 pagineSummer Training Embedded SystemmjcetpaNessuna valutazione finora
- 06 LabVIEW Interface For Arduino (LIFA)Documento6 pagine06 LabVIEW Interface For Arduino (LIFA)Cleber José de SouzaNessuna valutazione finora
- Water Depth Sensor MS5540C Arduino TutorialDocumento8 pagineWater Depth Sensor MS5540C Arduino TutorialRohit JangidNessuna valutazione finora
- Autonomus CarsDocumento79 pagineAutonomus CarsDionisie LefterNessuna valutazione finora
- Smart Blind Stick Using Proteus: Electrical EngineeringDocumento44 pagineSmart Blind Stick Using Proteus: Electrical EngineeringRudra PrasadNessuna valutazione finora
- Speed Control of Stepper MotorDocumento63 pagineSpeed Control of Stepper MotorMohammad Ismail Hossain (Sujohn)100% (4)
- Analog-To-Digital Conversion Btech IIIDocumento50 pagineAnalog-To-Digital Conversion Btech IIILisa BhagatNessuna valutazione finora
- Spi PPTDocumento15 pagineSpi PPTsavijeth100% (1)
- Tiq ComparatorDocumento16 pagineTiq ComparatorKuldeep GuptaNessuna valutazione finora
- Theory:: Experiment 3 Buck ConverterDocumento3 pagineTheory:: Experiment 3 Buck ConverterRAVI DUTTNessuna valutazione finora
- Graphs: Paths, Trees and Flows: Jordi Cortadella and Jordi Petit Department of Computer ScienceDocumento71 pagineGraphs: Paths, Trees and Flows: Jordi Cortadella and Jordi Petit Department of Computer ScienceLuiz DuarteNessuna valutazione finora
- Force Commutated InvertersDocumento55 pagineForce Commutated InverterssyukurkkNessuna valutazione finora
- Acdc Seminar 2 e PDFDocumento56 pagineAcdc Seminar 2 e PDFNhân Nhậu NhẹtNessuna valutazione finora
- BiCMOS TechnologyDocumento17 pagineBiCMOS TechnologyJacob ChakoNessuna valutazione finora
- Communication PDFDocumento85 pagineCommunication PDFAnonymous j2rSCfdMNessuna valutazione finora
- Metal Detecting RobotDocumento51 pagineMetal Detecting RobotBariq MohammadNessuna valutazione finora
- Arduino UNODocumento6 pagineArduino UNOsalmanNessuna valutazione finora
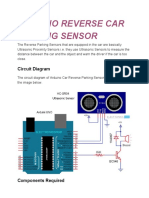
- Arduino Reverse Car Parking Sensor PDFDocumento6 pagineArduino Reverse Car Parking Sensor PDFSaumya Thakur100% (1)
- My ResumeDocumento1 paginaMy ResumeAbhimanyuDhawan0% (1)
- IoT Based Underground Fault Cable Detection Using Wireless TechnologyDocumento3 pagineIoT Based Underground Fault Cable Detection Using Wireless TechnologyInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- 10Documento14 pagine10radiobrunoNessuna valutazione finora
- Li-Ion Battery Charger PDFDocumento1 paginaLi-Ion Battery Charger PDFfarizatulakmam bujangNessuna valutazione finora
- Buck ConvertersDocumento15 pagineBuck Convertersmuddassir07100% (2)
- Embedded System Components PDFDocumento208 pagineEmbedded System Components PDFHoang Manh100% (1)
- Speed Control of Induction Motor by Using IR11Documento16 pagineSpeed Control of Induction Motor by Using IR11Anuj TripathiNessuna valutazione finora
- Shymgen System - Optimizing The Performance of Shaft Generator and Drive Train On Fishing VesselsDocumento6 pagineShymgen System - Optimizing The Performance of Shaft Generator and Drive Train On Fishing VesselsADRIANSF1Nessuna valutazione finora
- Nokia 5110 LCD Displays On The ATtinyDocumento14 pagineNokia 5110 LCD Displays On The ATtinypolikarpaNessuna valutazione finora
- TCP in Wireless DomainDocumento30 pagineTCP in Wireless DomainMurugan Antham RNessuna valutazione finora
- Smart Room Temperature Controller AtmegaDocumento3 pagineSmart Room Temperature Controller AtmegaIsraelPerezSanchez0% (1)
- LED DisplayDocumento25 pagineLED DisplayCreative StudioNessuna valutazione finora
- Automatic Voltage Stabilizer With PIC16F873ADocumento21 pagineAutomatic Voltage Stabilizer With PIC16F873Atahmidmc92% (25)
- Automatic Voltage Stabilizer Circuit DiagramDocumento6 pagineAutomatic Voltage Stabilizer Circuit DiagramFuh ValleryNessuna valutazione finora
- Power InverterDocumento2 paginePower Inverterfaysal_superiorNessuna valutazione finora
- Motorcycle Alarm SystemDocumento6 pagineMotorcycle Alarm Systemjewel768Nessuna valutazione finora
- TVS Apache RTR 180 Service Manual Internal Training Manual Rev1Documento28 pagineTVS Apache RTR 180 Service Manual Internal Training Manual Rev1Jhonatan ContrerasNessuna valutazione finora
- Electrical Diagram TVS APACHEDocumento1 paginaElectrical Diagram TVS APACHEjewel768Nessuna valutazione finora
- InstaPDF - in Tvs Apache RTR 160 Spare Parts Price List 171Documento13 pagineInstaPDF - in Tvs Apache RTR 160 Spare Parts Price List 171Abdul HafeezNessuna valutazione finora
- TVS Apache RTR 180 Service Manual Internal Training Manual Rev1Documento28 pagineTVS Apache RTR 180 Service Manual Internal Training Manual Rev1Jhonatan ContrerasNessuna valutazione finora
- User Manual Tass V2Documento1 paginaUser Manual Tass V2jewel768Nessuna valutazione finora
- PasswordDocumento1 paginaPasswordjewel768Nessuna valutazione finora
- Electrical Diagram TVS APACHEDocumento1 paginaElectrical Diagram TVS APACHEjewel768Nessuna valutazione finora
- RTR 160 Service ManualDocumento80 pagineRTR 160 Service Manualnox250585% (20)
- Manuals Apache RR 310 NewDocumento182 pagineManuals Apache RR 310 Newjewel768Nessuna valutazione finora
- Manuals Apache RR 310 NewDocumento182 pagineManuals Apache RR 310 Newjewel768Nessuna valutazione finora
- RouterOS by Example Second Edition TOCDocumento13 pagineRouterOS by Example Second Edition TOCmahmoud_shukur1447Nessuna valutazione finora
- Eula - NVIDIA Software: License of Customer UseDocumento3 pagineEula - NVIDIA Software: License of Customer UseJonathan TanNessuna valutazione finora
- ST-901 User ManualDocumento10 pagineST-901 User ManualEugenio100% (1)
- EG8010 EnglishDocumento13 pagineEG8010 Englishjewel768Nessuna valutazione finora
- ReadmeDocumento37 pagineReadmePablo ManuelNessuna valutazione finora
- LicenseDocumento7 pagineLicenseAdnan AvdukićNessuna valutazione finora
- Downloaded FromDocumento1 paginaDownloaded FromTIRUPATI MAIL SERVICENessuna valutazione finora
- Downloaded FromDocumento1 paginaDownloaded FromTIRUPATI MAIL SERVICENessuna valutazione finora
- SWDescDocumento1 paginaSWDescjewel768Nessuna valutazione finora
- RTR 160 Service ManualDocumento80 pagineRTR 160 Service Manualnox250585% (20)
- Maintenance RTR160Documento5 pagineMaintenance RTR160jewel768Nessuna valutazione finora
- TVS Apache RTR 180 - Service ManualDocumento24 pagineTVS Apache RTR 180 - Service ManualPraveesh Ambalathody70% (30)
- Battery Charger PDFDocumento27 pagineBattery Charger PDFVarada Radjou CNessuna valutazione finora
- T-Hsbk-Dr2K: Installation Instructions - Three Core Heat-Shrink Breakout KitDocumento3 pagineT-Hsbk-Dr2K: Installation Instructions - Three Core Heat-Shrink Breakout KitEdwin QuispeNessuna valutazione finora
- BCP3 R1Documento4 pagineBCP3 R1Fulton Xavier ZambranoNessuna valutazione finora
- FetzerDocumento14 pagineFetzerAleNessuna valutazione finora
- Capacitor Bank DesignDocumento31 pagineCapacitor Bank DesignRamani Ranjan Chiku100% (1)
- Superior Controls Sterling 12 Sprinkler System ManualDocumento28 pagineSuperior Controls Sterling 12 Sprinkler System Manualpeterchane100% (2)
- ECE Experiment No 5Documento11 pagineECE Experiment No 5GeeK GuYNessuna valutazione finora
- Lampu TL - Philips Tms PDFDocumento2 pagineLampu TL - Philips Tms PDFmitra perkasa multigunaNessuna valutazione finora
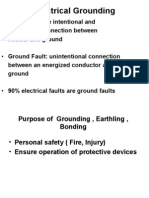
- Basics of Electrical Grounding Earthing and BondingDocumento35 pagineBasics of Electrical Grounding Earthing and BondingSharad_B_Patel100% (3)
- Direct-Current Dynamos: Construction & Armature WindingsDocumento43 pagineDirect-Current Dynamos: Construction & Armature WindingsHane MinasalbasNessuna valutazione finora
- MV and Synch Gear As Built-3Documento21 pagineMV and Synch Gear As Built-3Sayed Younis SadaatNessuna valutazione finora
- Basic Substation LectureDocumento60 pagineBasic Substation LectureBer Salazar Jr67% (3)
- Overlapping Contact 800t Td006 en PDocumento8 pagineOverlapping Contact 800t Td006 en PDony SaputraNessuna valutazione finora
- 980G Wheel Loader Electrical System: Machine Harness Connector and Component LocationsDocumento2 pagine980G Wheel Loader Electrical System: Machine Harness Connector and Component LocationsRafa GarciaNessuna valutazione finora
- DSE4510 MKII DSE4520 MKII Installation InstructionsDocumento2 pagineDSE4510 MKII DSE4520 MKII Installation InstructionsElias MarcolinoNessuna valutazione finora
- Parafusadeira Makita 6723DWDocumento2 pagineParafusadeira Makita 6723DWTarcisio LoboNessuna valutazione finora
- Meta M357Tv2 FittingDocumento3 pagineMeta M357Tv2 Fittings12original100% (4)
- Dynam Esc ManualDocumento3 pagineDynam Esc ManualjozoceNessuna valutazione finora
- UPSDocumento11 pagineUPSkrishan_raj_1Nessuna valutazione finora
- UF3C065040B3 Data SheetDocumento13 pagineUF3C065040B3 Data Sheetsultaniwahid240Nessuna valutazione finora
- GPC - 3000 PDFDocumento35 pagineGPC - 3000 PDFmarceloo1993Nessuna valutazione finora
- CIGRE IEEE Tutorial 2012 Part 1 GeneralDocumento7 pagineCIGRE IEEE Tutorial 2012 Part 1 GeneralStalin OlallaNessuna valutazione finora
- SINAMICS V50 - FX Power Module Electrical Installa - 200904Documento8 pagineSINAMICS V50 - FX Power Module Electrical Installa - 200904Pandu BirumakovelaNessuna valutazione finora
- Cbse Project Automatic Night Lamp Using LDRDocumento10 pagineCbse Project Automatic Night Lamp Using LDRAbhayNessuna valutazione finora
- Busway Short Ciruit Testing ProceduresDocumento3 pagineBusway Short Ciruit Testing ProceduresJAIRO EDUARDO RAMIREZ ACERO100% (1)
- Experiment - 4: © MEC, BikanerDocumento5 pagineExperiment - 4: © MEC, Bikanersahumanish9240Nessuna valutazione finora
- Senr 1446 A 00001Documento12 pagineSenr 1446 A 00001Nicole SmithNessuna valutazione finora
- Vac Pa160 Mono AmplifierDocumento5 pagineVac Pa160 Mono AmplifierPAUL LindemannNessuna valutazione finora
- Mitsubishi A800 ManualDocumento714 pagineMitsubishi A800 ManualAlejandro Garcia0% (1)
- 2-Ex No - 1-18-Jul-2019Material - I - 18-Jul-2019 - Ex - No - 1Documento18 pagine2-Ex No - 1-18-Jul-2019Material - I - 18-Jul-2019 - Ex - No - 1Balaji SrinivasNessuna valutazione finora