Potrebbero piacerti anche
- Jharokha Sep-2011Documento5 pagineJharokha Sep-2011hodeegits9526Nessuna valutazione finora
- SYSTEM STUDY Restructured Power SystemDocumento8 pagineSYSTEM STUDY Restructured Power Systemhodeegits9526Nessuna valutazione finora
- Nodal Reliability and Nodal PricesDocumento7 pagineNodal Reliability and Nodal Priceshodeegits9526Nessuna valutazione finora
- Jharokha: What Is Lokpal Bill and Why It's Important???Documento4 pagineJharokha: What Is Lokpal Bill and Why It's Important???hodeegits9526Nessuna valutazione finora
- Introduction Dergulated Power SystemDocumento15 pagineIntroduction Dergulated Power Systemhodeegits9526Nessuna valutazione finora
- KTG & Thermodynamics (QB)Documento18 pagineKTG & Thermodynamics (QB)hodeegits9526Nessuna valutazione finora
- Role of Automatic Generation Control (AGC) in Energy Management SystemDocumento49 pagineRole of Automatic Generation Control (AGC) in Energy Management Systemhodeegits9526Nessuna valutazione finora
- 12th Physics II Term Test 2017 - 18Documento3 pagine12th Physics II Term Test 2017 - 18hodeegits9526Nessuna valutazione finora
- Work Energy NiosDocumento14 pagineWork Energy Nioshodeegits9526Nessuna valutazione finora
- Harmonics Analysis of Thirteen-Level Inverter: MR - Amzad Ali, Er - Prabhat Kumar, Mr. Shiv Shanker SharmaDocumento7 pagineHarmonics Analysis of Thirteen-Level Inverter: MR - Amzad Ali, Er - Prabhat Kumar, Mr. Shiv Shanker Sharmahodeegits9526Nessuna valutazione finora
- Literature Survey For Compensating Capacitor PlacementDocumento8 pagineLiterature Survey For Compensating Capacitor Placementhodeegits9526Nessuna valutazione finora
- Unit-I: Introduction of BJTDocumento56 pagineUnit-I: Introduction of BJThodeegits9526Nessuna valutazione finora
- Content Approximate % of TestDocumento2 pagineContent Approximate % of Testhodeegits9526Nessuna valutazione finora
- Performance Analysis of Grid Connected Photovoltaic SystemDocumento5 paginePerformance Analysis of Grid Connected Photovoltaic Systemhodeegits9526Nessuna valutazione finora
- Microgrid System ReviewDocumento6 pagineMicrogrid System Reviewhodeegits9526Nessuna valutazione finora
- Load Flow Analysis and GA MethodDocumento8 pagineLoad Flow Analysis and GA Methodhodeegits9526Nessuna valutazione finora
- Matlab Simulation Lab Viii SemesterDocumento1 paginaMatlab Simulation Lab Viii Semesterhodeegits9526Nessuna valutazione finora
- Phase Shift Full Bridge ConverterDocumento22 paginePhase Shift Full Bridge Converterhodeegits9526100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Miner Statistics - Best Ethereum ETH Mining Pool - 2minersDocumento1 paginaMiner Statistics - Best Ethereum ETH Mining Pool - 2minersSaeful AnwarNessuna valutazione finora
- Let'S Learn Algebra in Earl'S Way The Easy Way!Documento23 pagineLet'S Learn Algebra in Earl'S Way The Easy Way!Cristinejoy OletaNessuna valutazione finora
- BEKO L6B PDP Service ManualDocumento121 pagineBEKO L6B PDP Service Manualvideoson100% (2)
- E Commerce Project Naan MudhalvanDocumento25 pagineE Commerce Project Naan Mudhalvanlakshmikandhan342Nessuna valutazione finora
- Math Class 4 PaperDocumento2 pagineMath Class 4 PaperMudsarali KhushikNessuna valutazione finora
- Domini OsDocumento606 pagineDomini OsMohamed GhiatiNessuna valutazione finora
- ZXDU68 B451 V6.0R20M02 DC Power System Quick Installation GuideDocumento7 pagineZXDU68 B451 V6.0R20M02 DC Power System Quick Installation GuideVictor ArticaNessuna valutazione finora
- Assignment 2dbmsDocumento13 pagineAssignment 2dbmsTXACORPNessuna valutazione finora
- This XML File Does Not Appear To Have Any Style Information Associated With It. The Document Tree Is Shown BelowDocumento7 pagineThis XML File Does Not Appear To Have Any Style Information Associated With It. The Document Tree Is Shown BelowSpit FireNessuna valutazione finora
- Solution Manual For Principles of Measurement Systems by John P BentleyDocumento2 pagineSolution Manual For Principles of Measurement Systems by John P BentleySrikanth Revelly60% (15)
- Corporate Entrepreneurship - HowDocumento30 pagineCorporate Entrepreneurship - HowHoang Anh TuanNessuna valutazione finora
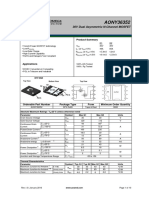
- AONY36352: 30V Dual Asymmetric N-Channel MOSFETDocumento10 pagineAONY36352: 30V Dual Asymmetric N-Channel MOSFETrobertjavi1983Nessuna valutazione finora
- Index in OLap DataDocumento11 pagineIndex in OLap Datashikhagupta3288Nessuna valutazione finora
- Cheatsheet Supervised LearningDocumento4 pagineCheatsheet Supervised Learningan7l7aNessuna valutazione finora
- GraphQL With React The Complete Developers GuideDocumento12 pagineGraphQL With React The Complete Developers GuideswadhincyberNessuna valutazione finora
- Manual Cheetah XIDocumento158 pagineManual Cheetah XIart159357100% (3)
- Market Basket AnalysisDocumento15 pagineMarket Basket AnalysisAkanksha KadamNessuna valutazione finora
- Bridge Design Pattern: Presented By: Atif Saeed Misbah NiaziDocumento22 pagineBridge Design Pattern: Presented By: Atif Saeed Misbah Niaziaaatif121Nessuna valutazione finora
- Micrologix 1400 IntroductionDocumento7 pagineMicrologix 1400 IntroductionsayedmhNessuna valutazione finora
- Module 8 Activities (Cyber and Digital Literacy)Documento3 pagineModule 8 Activities (Cyber and Digital Literacy)John MathewNessuna valutazione finora
- Apa Flyer - CFDDocumento2 pagineApa Flyer - CFDSantiago UrgilesNessuna valutazione finora
- SAS Vs FC Vs ISCSI PDFDocumento15 pagineSAS Vs FC Vs ISCSI PDFLeonNessuna valutazione finora
- 015 Pipe Flanges Schedule 40Documento4 pagine015 Pipe Flanges Schedule 40MOHAMMAD ASIFNessuna valutazione finora
- WDM Important Questions 1Documento3 pagineWDM Important Questions 1PinkNessuna valutazione finora
- ADMS Assignment Spring 2011Documento8 pagineADMS Assignment Spring 2011muneermuhammadNessuna valutazione finora
- Optical Wireless Communications For Beyond 5G Networks and IoT - Unit 6 - Week 3Documento1 paginaOptical Wireless Communications For Beyond 5G Networks and IoT - Unit 6 - Week 3Sarika JainNessuna valutazione finora
- Personal Particulars: Thanuja ParamanandanDocumento4 paginePersonal Particulars: Thanuja ParamanandanThanujaNessuna valutazione finora
- Baker Campbell FormulaDocumento3 pagineBaker Campbell FormulaArkayan LahaNessuna valutazione finora
- Camera Trap ManualDocumento94 pagineCamera Trap ManualAndreas VetraNessuna valutazione finora
- Color Palettes For Graphic DesignDocumento19 pagineColor Palettes For Graphic DesignClarence Tuazon FloresNessuna valutazione finora