Potrebbero piacerti anche
- Electricity in Fish Research and Management: Theory and PracticeDa EverandElectricity in Fish Research and Management: Theory and PracticeNessuna valutazione finora
- Caswell Etd Ch2 PDFDocumento51 pagineCaswell Etd Ch2 PDFravi010582Nessuna valutazione finora
- Fractalcoms: The Square Spiral Antenna: Benchmark For Prefractal Antenna PerformanceDocumento20 pagineFractalcoms: The Square Spiral Antenna: Benchmark For Prefractal Antenna Performanceঅল্পবোঝা পাবলিকNessuna valutazione finora
- Spiral BY: Experimental Investigation OF Type Dual Antenna FED A Microstrip LineDocumento4 pagineSpiral BY: Experimental Investigation OF Type Dual Antenna FED A Microstrip LineajayNessuna valutazione finora
- RFID Coils Antena PDFDocumento21 pagineRFID Coils Antena PDFCoco CoxNessuna valutazione finora
- V12 PDFDocumento623 pagineV12 PDFFrew FrewNessuna valutazione finora
- V12 PDFDocumento623 pagineV12 PDFspkrishna4u7369Nessuna valutazione finora
- V12Documento623 pagineV12Mahendra SinghNessuna valutazione finora
- Split Ring Slot PDFDocumento3 pagineSplit Ring Slot PDFTEGUH SUHARTONessuna valutazione finora
- Annular RingDocumento3 pagineAnnular RingShanaz AmanNessuna valutazione finora
- Coil Inductance CalculatorDocumento5 pagineCoil Inductance CalculatorJamMnx_Nessuna valutazione finora
- Numerical Computation External Resonant Cavities: E.g., Coaxial Lines and WaveguidesDocumento4 pagineNumerical Computation External Resonant Cavities: E.g., Coaxial Lines and WaveguideshmalrizzoNessuna valutazione finora
- WWW - Stanford.edu Jbarral Downloads JoelleBarral CoilDesignDocumento9 pagineWWW - Stanford.edu Jbarral Downloads JoelleBarral CoilDesignSachin_AnchanNessuna valutazione finora
- Practical Formula Cable TensionDocumento6 paginePractical Formula Cable TensionAlma M. LaraNessuna valutazione finora
- Miniaturization of Multiband Annular Slot Ring Antenna Using Reactive LoadingDocumento13 pagineMiniaturization of Multiband Annular Slot Ring Antenna Using Reactive LoadingSamrat JanjanamNessuna valutazione finora
- Design of A Microstrip Patch Antenna Array Using Ie3d SoftwareDocumento5 pagineDesign of A Microstrip Patch Antenna Array Using Ie3d SoftwareAnkitPatelNessuna valutazione finora
- B/C6D ,-&"/00 +, && $ce +fg./hi/,6j&6+ K&e/0 - ,& O:m&&p.c67 6ck&e/0 - ,&+Q&$G&7.C, 03 7&C, E&& ./6/ R/.&6+ K&C..CJ0&&Documento6 pagineB/C6D ,-&"/00 +, && $ce +fg./hi/,6j&6+ K&e/0 - ,& O:m&&p.c67 6ck&e/0 - ,&+Q&$G&7.C, 03 7&C, E&& ./6/ R/.&6+ K&C..CJ0&&Marcelo PirizNessuna valutazione finora
- Microwave Journel DesignDocumento5 pagineMicrowave Journel DesignSubburam SrinivasanNessuna valutazione finora
- Models - Acdc.ecore TransformerDocumento34 pagineModels - Acdc.ecore TransformerAnonymous gB76eOdR100% (1)
- Awp Unit III Notes Part IIDocumento10 pagineAwp Unit III Notes Part IIl22aecmanojNessuna valutazione finora
- The Effect of DC On The Inductance of A Ferrite CoreDocumento4 pagineThe Effect of DC On The Inductance of A Ferrite CoreAndrei LeleaNessuna valutazione finora
- p240f12 Midterm 3-SolutionsDocumento13 paginep240f12 Midterm 3-SolutionsKrishna MahajanNessuna valutazione finora
- Antenna Design of RFID ApplicationsDocumento5 pagineAntenna Design of RFID ApplicationsiliefinisNessuna valutazione finora
- Slot WindingDocumento22 pagineSlot WindingFitri Senpai75% (4)
- Loop Antenna EquationsDocumento11 pagineLoop Antenna EquationsSon Nguyen100% (1)
- A SourceofE Andh FieldsforAntenna-FactorCalibrationDocumento8 pagineA SourceofE Andh FieldsforAntenna-FactorCalibrationNguyen Dinh TuanNessuna valutazione finora
- Properties of Ridge Waveguide PDFDocumento6 pagineProperties of Ridge Waveguide PDFవేలుసామి లింగాసామిNessuna valutazione finora
- Survey On Helical AntennaDocumento22 pagineSurvey On Helical AntennaShiva MetikalaNessuna valutazione finora
- Hollow Waveguide TapersDocumento6 pagineHollow Waveguide Tapersgeodinger9316Nessuna valutazione finora
- A Calibration Method For Small Circular LoopDocumento5 pagineA Calibration Method For Small Circular LoopaartrajNessuna valutazione finora
- Resonant AntennasDocumento27 pagineResonant Antennasrakesh hudedNessuna valutazione finora
- BMEN 3120 Capacitive CircuitsDocumento16 pagineBMEN 3120 Capacitive CircuitsAmi ShahNessuna valutazione finora
- Circularly Polarized Microstrip Patch Antenna Fed by Substrate Integrated WaveguideDocumento4 pagineCircularly Polarized Microstrip Patch Antenna Fed by Substrate Integrated WaveguideragvshahNessuna valutazione finora
- 80 M LoopDocumento6 pagine80 M LoopTJBNessuna valutazione finora
- EXPT 6 - LABORATORY MANUAL: Simulation of Helical Antenna Using AN-SOF Antenna SimulatorDocumento9 pagineEXPT 6 - LABORATORY MANUAL: Simulation of Helical Antenna Using AN-SOF Antenna SimulatorKim Andre Macaraeg100% (1)
- Lab 4 Electric PotentialDocumento4 pagineLab 4 Electric PotentialJorge Tenorio0% (1)
- Broadband Antennas and Traveling WaveDocumento40 pagineBroadband Antennas and Traveling WaveVeli50% (2)
- Design of Axial Mode Helical Antenna PDFDocumento3 pagineDesign of Axial Mode Helical Antenna PDFafadlianNessuna valutazione finora
- Progress in Electromagnetics Research Letters, Vol. 15, 145-152, 2010Documento8 pagineProgress in Electromagnetics Research Letters, Vol. 15, 145-152, 2010Alka VermaNessuna valutazione finora
- Class - Xii Unit Test - II - 2016 AnswersDocumento8 pagineClass - Xii Unit Test - II - 2016 Answersapi-326046013Nessuna valutazione finora
- BroadBand Antennas and Traveling Wave AntennasDocumento36 pagineBroadBand Antennas and Traveling Wave AntennasVeli100% (1)
- Development of An Exponential TaperedDocumento4 pagineDevelopment of An Exponential TaperedFabian VazquezNessuna valutazione finora
- Theory of Frequency-Independent Antennas As Traveling-Wave Antennas and Their Asymptotic Solution by Method of Stationary PhaseDocumento4 pagineTheory of Frequency-Independent Antennas As Traveling-Wave Antennas and Their Asymptotic Solution by Method of Stationary PhasekillerjackassNessuna valutazione finora
- Abstract:: A Coplanar Waveguide Bow-Tie Aperture Antenna Guiping Zheng, Atef 2 - Elsherbeni, and Charles E. SmithDocumento4 pagineAbstract:: A Coplanar Waveguide Bow-Tie Aperture Antenna Guiping Zheng, Atef 2 - Elsherbeni, and Charles E. SmithSỹ RonNessuna valutazione finora
- LAB BeeDocumento16 pagineLAB Bee22-03844Nessuna valutazione finora
- Universal Relations For Coupling of Optical Power Between Microresonators and Dielectric WaveguidesDocumento2 pagineUniversal Relations For Coupling of Optical Power Between Microresonators and Dielectric Waveguidesthanh910Nessuna valutazione finora
- Lin AntDocumento9 pagineLin AntDeepak ReddyNessuna valutazione finora
- Slotted Waveguide Antenna Design Using 3D EM SimulationDocumento10 pagineSlotted Waveguide Antenna Design Using 3D EM SimulationJuhasz GaborNessuna valutazione finora
- Magnetic Materials Assignment HelpDocumento6 pagineMagnetic Materials Assignment HelpEdu Assignment Help100% (1)
- SC 6Documento6 pagineSC 6jspammail2306Nessuna valutazione finora
- Progress in Electromagnetics Research, PIER 53, 227-237, 2005Documento11 pagineProgress in Electromagnetics Research, PIER 53, 227-237, 2005Sebastián AmayaNessuna valutazione finora
- Parametric Study of Rotor Slot Shape On A Cage Induction MotorDocumento0 pagineParametric Study of Rotor Slot Shape On A Cage Induction MotorvishiwizardNessuna valutazione finora
- ECE 788: Electrical Machines Assignment 2: Submitted byDocumento14 pagineECE 788: Electrical Machines Assignment 2: Submitted byShamsuddeen NalakathNessuna valutazione finora
- Davies 1965Documento5 pagineDavies 1965Arun GoelNessuna valutazione finora
- Laboratory 2 BEEDocumento11 pagineLaboratory 2 BEE22-03844Nessuna valutazione finora
- Analog Multiplier Using Operational AmplifiersDocumento4 pagineAnalog Multiplier Using Operational AmplifiersxongassilvaNessuna valutazione finora
- Chapter 1Documento14 pagineChapter 1Varadharajan EswaramoorthiNessuna valutazione finora
- A Novel Compact Archimedean Spiral Antenna With Gap-LoadingDocumento9 pagineA Novel Compact Archimedean Spiral Antenna With Gap-Loadinglazy115Nessuna valutazione finora
- Mimo OfdmDocumento7 pagineMimo OfdmTahir SiddiquiNessuna valutazione finora
- QPSK and 16-QAMDocumento56 pagineQPSK and 16-QAMHuy Hoang100% (1)
- House and Home: Outside AppearanceDocumento4 pagineHouse and Home: Outside Appearancelazy115Nessuna valutazione finora
- ThietKeViMach CMOS VLSI TongVanOnDocumento169 pagineThietKeViMach CMOS VLSI TongVanOnLam TuyenNessuna valutazione finora
- OpNET - LTEDocumento84 pagineOpNET - LTEzinonasNessuna valutazione finora
- Subscriber Unit - Data Sheet (RW5000/SU-Air/5CC5/F58/FCC/EXT)Documento2 pagineSubscriber Unit - Data Sheet (RW5000/SU-Air/5CC5/F58/FCC/EXT)AbdallaNessuna valutazione finora
- Lab3 Comsats Eee231 Electric Circuit AnalysisDocumento13 pagineLab3 Comsats Eee231 Electric Circuit AnalysisSuleman MalikNessuna valutazione finora
- ARRL - Computer Networking Conference 12 (1993)Documento118 pagineARRL - Computer Networking Conference 12 (1993)qrzdx?Nessuna valutazione finora
- OBD-II Protocols: Sae J1850 PWMDocumento3 pagineOBD-II Protocols: Sae J1850 PWMgtranNessuna valutazione finora
- AAU5831 Technical Specifications (V100R016C10 - 02) (PDF) - ENDocumento34 pagineAAU5831 Technical Specifications (V100R016C10 - 02) (PDF) - ENOndra CizekNessuna valutazione finora
- Internship Report Caa PakistanDocumento18 pagineInternship Report Caa Pakistanziaullah88Nessuna valutazione finora
- Creating Ultra-Reliable Wireless Backhaul Wireless Networks For Train-to-Ground ApplicationsDocumento46 pagineCreating Ultra-Reliable Wireless Backhaul Wireless Networks For Train-to-Ground ApplicationsCESAR PEREZNessuna valutazione finora
- Cmpa1f1h060fpdf 240110 092032Documento18 pagineCmpa1f1h060fpdf 240110 092032威爾WNessuna valutazione finora
- Joyin Kingstar-Bluetooth Earphone Quotation2023Documento13 pagineJoyin Kingstar-Bluetooth Earphone Quotation2023Ada la ki zongoNessuna valutazione finora
- Introduction PDFDocumento39 pagineIntroduction PDFTadesse DestawNessuna valutazione finora
- Data Acquisition System Development For A Hydraulic Plant Using Hybrid Communication Network Based On LoRaDocumento6 pagineData Acquisition System Development For A Hydraulic Plant Using Hybrid Communication Network Based On LoRaCrispNessuna valutazione finora
- Digital Signal LabDocumento13 pagineDigital Signal LabHermain Fayyaz KarimNessuna valutazione finora
- IMO Resolution A.954 (23) Proper Use of VHFDocumento7 pagineIMO Resolution A.954 (23) Proper Use of VHFmiticaffNessuna valutazione finora
- 07 - W04L01 - Transmission MediaDocumento10 pagine07 - W04L01 - Transmission MediaFartash ShahzaibNessuna valutazione finora
- TX GatesAir LX SeriesDocumento7 pagineTX GatesAir LX SeriesHever RodriguezNessuna valutazione finora
- Wpa Open End LabDocumento1 paginaWpa Open End LabZeeshan ZahidNessuna valutazione finora
- Nokia 1830 PSS and PSI-L Platforms DataSheet ENDocumento6 pagineNokia 1830 PSS and PSI-L Platforms DataSheet ENViviana Hernández Tique100% (1)
- Inplant Training ReportDocumento54 pagineInplant Training ReportDanish Ahmed50% (2)
- Noc18-Cs09 Week 01 Assignment 01Documento3 pagineNoc18-Cs09 Week 01 Assignment 01Kelem TarNessuna valutazione finora
- FIR & IIR Filters DesignDocumento12 pagineFIR & IIR Filters DesignPreeti KatiyarNessuna valutazione finora
- Integrator DiffentiatorDocumento7 pagineIntegrator Diffentiatorআব্দুল্লাহ আল ইমরানNessuna valutazione finora
- Irepeater Install Manual2Documento2 pagineIrepeater Install Manual2Vivek JhaNessuna valutazione finora
- Kenwood - TK-2000E - 3000E - BrochureDocumento2 pagineKenwood - TK-2000E - 3000E - BrochureAndriantsoa HeritianaNessuna valutazione finora
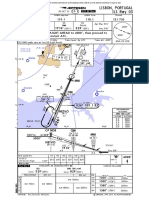
- Lisboa Arrival ChartDocumento10 pagineLisboa Arrival ChartBruno CardosoNessuna valutazione finora
- CS2105 Problem Set 1Documento2 pagineCS2105 Problem Set 1weitsangNessuna valutazione finora
- Radio Wave Propagation 2Documento80 pagineRadio Wave Propagation 2Juliana Nepembe100% (1)
- MTS 60 AQU4518R21v06 (4x 1710-2690, 1,5m)Documento2 pagineMTS 60 AQU4518R21v06 (4x 1710-2690, 1,5m)МиланNessuna valutazione finora
- Nichols ChartDocumento9 pagineNichols ChartJin Sung AhnNessuna valutazione finora
- Homework 3 (50 Points) : Lahore University of Management Sciences EE380 - Communication Systems Fall 2021Documento2 pagineHomework 3 (50 Points) : Lahore University of Management Sciences EE380 - Communication Systems Fall 2021Hafiz Muhammad Umar AslamNessuna valutazione finora