Potrebbero piacerti anche
- Estrategias de ControlDocumento8 pagineEstrategias de Controlh233115Nessuna valutazione finora
- Técnicas de Control Tema 4 Instrumentacion y ControlDocumento26 pagineTécnicas de Control Tema 4 Instrumentacion y ControlheidypreciadoalvarezNessuna valutazione finora
- Introducción A Los Sistemas de ControlDocumento6 pagineIntroducción A Los Sistemas de ControlTomas Casiano ArielNessuna valutazione finora
- Control AnticipativoDocumento20 pagineControl AnticipativoGrecia ChucNessuna valutazione finora
- Conceptos Básicos DE SISTEMA DE CONTROLDocumento8 pagineConceptos Básicos DE SISTEMA DE CONTROLrachelNessuna valutazione finora
- Introducción y Aplicaciones de Sistemas de Lazo Abierto y Lazo CerradoDocumento6 pagineIntroducción y Aplicaciones de Sistemas de Lazo Abierto y Lazo CerradoJung Angy Lee100% (1)
- Control AnticipativoDocumento20 pagineControl AnticipativoLuis Knals40% (5)
- Sistema de ComunicaciónDocumento11 pagineSistema de ComunicaciónAlejandra ParraNessuna valutazione finora
- UNIDAD 4 Tecnicas Adicionales de Control EQ4Documento17 pagineUNIDAD 4 Tecnicas Adicionales de Control EQ4Maxi Iglesias Scott KennedyNessuna valutazione finora
- Control de CascadaDocumento7 pagineControl de CascadaORLANDO RODRIGUEZNessuna valutazione finora
- Control IndustrialDocumento34 pagineControl IndustrialTren ColeNessuna valutazione finora
- Informe Control EeDocumento18 pagineInforme Control EeGianella EmiliNessuna valutazione finora
- Acordeon ChamanDocumento7 pagineAcordeon ChamanErick OverkillNessuna valutazione finora
- Estructuras Avanzadas de ControlDocumento7 pagineEstructuras Avanzadas de ControlJorge Ignacio Gonzalez CanoNessuna valutazione finora
- Sistema Lazo Abierto y CerradoDocumento6 pagineSistema Lazo Abierto y Cerradoaide natalyNessuna valutazione finora
- Unidad Vi: Sistemas de Control: ControladoresDocumento12 pagineUnidad Vi: Sistemas de Control: ControladoresErik RincónNessuna valutazione finora
- Controles AutomaticosDocumento70 pagineControles Automaticosfrankz89100% (1)
- Que Es Un Sistema de ControlDocumento12 pagineQue Es Un Sistema de ControlMargenis CoelloNessuna valutazione finora
- Aut y Control - Tema1Documento118 pagineAut y Control - Tema1Familia Lara GomezNessuna valutazione finora
- Actividad 1. Simulación y Control Automático de Procesos (Conceptos Básicos)Documento7 pagineActividad 1. Simulación y Control Automático de Procesos (Conceptos Básicos)Luisa Rodriguez BarragánNessuna valutazione finora
- Sistema de ControlDocumento9 pagineSistema de ControlCesar BlasNessuna valutazione finora
- Control FeedforwardDocumento3 pagineControl FeedforwardFernando SantoNessuna valutazione finora
- Sistemas de ControlDocumento3 pagineSistemas de ControlSain Ariel Ramos FuentesNessuna valutazione finora
- PAE I Clase 6Documento14 paginePAE I Clase 6Adrián SuárezNessuna valutazione finora
- Sistema de ControlDocumento6 pagineSistema de ControlEimer SalgueroNessuna valutazione finora
- Circuitos de Control. Vanessa Lugo. 28668322. Lab Sistemas de Control IiDocumento8 pagineCircuitos de Control. Vanessa Lugo. 28668322. Lab Sistemas de Control IiVnaessaNessuna valutazione finora
- p3 Resumen Sistemas DinamicosDocumento4 paginep3 Resumen Sistemas DinamicosEdwin GuzmánNessuna valutazione finora
- Tarea 1Documento5 pagineTarea 1Luis RamirezNessuna valutazione finora
- UNIDAD 4 Tecnicas Adicionales de Control EQ4Documento19 pagineUNIDAD 4 Tecnicas Adicionales de Control EQ4Maxi Iglesias Scott KennedyNessuna valutazione finora
- Introducción A Los Sistemas de Control IndustrialDocumento10 pagineIntroducción A Los Sistemas de Control IndustrialLuigi RodriguezNessuna valutazione finora
- Generalidades de InstrumentaciónDocumento7 pagineGeneralidades de InstrumentaciónLia MorenoNessuna valutazione finora
- Sc1-Tema 1 - IntroduccionDocumento35 pagineSc1-Tema 1 - Introduccioningjuanc1971Nessuna valutazione finora
- Controladores Unidad 4Documento17 pagineControladores Unidad 4Sol Garcia Vazquez100% (1)
- Sistemas de Control - Instrumentacion IndutrialDocumento20 pagineSistemas de Control - Instrumentacion IndutrialMarioNessuna valutazione finora
- Introducción A Los Sistemas de Control, ResumenDocumento5 pagineIntroducción A Los Sistemas de Control, ResumenYered TCNessuna valutazione finora
- Control Trabajo 1Documento32 pagineControl Trabajo 1Rivera MelyNessuna valutazione finora
- Tema 1. Introducción A Mediciones y Control Automático.Documento64 pagineTema 1. Introducción A Mediciones y Control Automático.Magdiel Ezequiel AguirreNessuna valutazione finora
- Tecnicas de Control de Chancadoras.Documento12 pagineTecnicas de Control de Chancadoras.marcos ruizNessuna valutazione finora
- Actividad Fundamentos de Control Automático de ProcesosDocumento12 pagineActividad Fundamentos de Control Automático de ProcesosManuel RamosNessuna valutazione finora
- Estrategias de ControlDocumento4 pagineEstrategias de ControlJANHCKNessuna valutazione finora
- U4 - InstrumentaciónDocumento27 pagineU4 - InstrumentaciónAlicia MontaneNessuna valutazione finora
- Control U1Documento41 pagineControl U1Diego PinedaNessuna valutazione finora
- Práctica Control de Temperatura de Un Reactor en Lazo Cerrado, Con Etapa de PrecalentamientoDocumento18 paginePráctica Control de Temperatura de Un Reactor en Lazo Cerrado, Con Etapa de PrecalentamientoMichel Sánchez ColinNessuna valutazione finora
- AutomatismosDocumento7 pagineAutomatismosCarlos GonzalezNessuna valutazione finora
- Ingenieria de ControlDocumento10 pagineIngenieria de ControlMiri MartinezNessuna valutazione finora
- Diapositivas CONTROL DE PROCESOS II UNIDAD I PDFDocumento58 pagineDiapositivas CONTROL DE PROCESOS II UNIDAD I PDFDina BolañosNessuna valutazione finora
- 3607-3615-2933 Laboratorio 2Documento12 pagine3607-3615-2933 Laboratorio 2Daniel Rojas SuarezNessuna valutazione finora
- Unidad 1 - Sistemas de ControlDocumento23 pagineUnidad 1 - Sistemas de ControlLuis Fernando Cruz AmadorNessuna valutazione finora
- Tema III - Luis Castillo 27592413 M01 TV FIIDocumento21 pagineTema III - Luis Castillo 27592413 M01 TV FIIluis castillo marcanoNessuna valutazione finora
- Sistema Lazo Abierto y CerradoDocumento8 pagineSistema Lazo Abierto y CerradoIsma RománNessuna valutazione finora
- AutomatizaciónDocumento56 pagineAutomatizaciónFavio QuijadaNessuna valutazione finora
- Lenguajes de Programacion PLC - Industrias GSLDocumento22 pagineLenguajes de Programacion PLC - Industrias GSLluis castillo marcanoNessuna valutazione finora
- Autom Tica Memoria 1Documento14 pagineAutom Tica Memoria 1Diego López SánchezNessuna valutazione finora
- Optimización y Ajuste de Los Parámetros de ControlDocumento14 pagineOptimización y Ajuste de Los Parámetros de ControlORLANDO RODRIGUEZNessuna valutazione finora
- Examen 1 PDFDocumento4 pagineExamen 1 PDFCrispin Noe Martin PerezNessuna valutazione finora
- Trip ControlDocumento3 pagineTrip ControlJuancho PerdomoNessuna valutazione finora
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Da EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Nessuna valutazione finora
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Da EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Valutazione: 2 su 5 stelle2/5 (1)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDa EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasValutazione: 2.5 su 5 stelle2.5/5 (3)
- Mantenimiento de redes eléctricas aéreas de alta tensión. ELEE0209Da EverandMantenimiento de redes eléctricas aéreas de alta tensión. ELEE0209Nessuna valutazione finora
- Pensum ExcellDocumento6 paginePensum ExcellDavid RiosNessuna valutazione finora
- Instalaciones Residenciales AluminioDocumento15 pagineInstalaciones Residenciales AluminioDavid RiosNessuna valutazione finora
- Sistemas de Puesta A Tierra para Edificios InteligentesDocumento59 pagineSistemas de Puesta A Tierra para Edificios InteligentesNewedge ChevarriaNessuna valutazione finora
- Controlador Temperatura Ej PDFDocumento4 pagineControlador Temperatura Ej PDFDavid RiosNessuna valutazione finora
- EstequeometriaDocumento16 pagineEstequeometriaDavid RiosNessuna valutazione finora
- Señales PWMDocumento13 pagineSeñales PWMJesús Robles EscobarNessuna valutazione finora
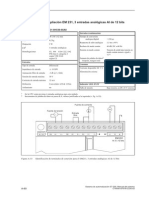
- A.33 Módulo de Ampliación EM 231, 3 Entradas Analógicas AI de 12 BitsDocumento9 pagineA.33 Módulo de Ampliación EM 231, 3 Entradas Analógicas AI de 12 BitsmcsecNessuna valutazione finora
- Marco Teórico 1Documento11 pagineMarco Teórico 1Jesus VazquezNessuna valutazione finora
- Pensum Version 3Documento5 paginePensum Version 3Facultad de Ingeniería U de ANessuna valutazione finora
- Convertidor Analógico-Digital (CDA o DAC)Documento4 pagineConvertidor Analógico-Digital (CDA o DAC)Castillo Rangel AntonioNessuna valutazione finora
- En Busca de Arduino - Un Viaje P - Rufian en La RedDocumento135 pagineEn Busca de Arduino - Un Viaje P - Rufian en La RedSantiago BerrocalNessuna valutazione finora
- Generador de Funciones y VoltimetroDocumento8 pagineGenerador de Funciones y VoltimetroMiguel Andres CastilloNessuna valutazione finora
- Cuadro Comparativo de Relés de Proteccion de Voltaje Serie VPRDocumento1 paginaCuadro Comparativo de Relés de Proteccion de Voltaje Serie VPRanon_8964006200% (1)
- Apuntes RedesDocumento382 pagineApuntes RedesJorge Montellano50% (2)
- Manual Del Transmisor 1 - 40Documento39 pagineManual Del Transmisor 1 - 40dodosirdes100% (1)
- Sensores Remotos y Aplicaciones en Teled PDFDocumento307 pagineSensores Remotos y Aplicaciones en Teled PDFRosmery Vega Solis100% (1)
- Problemario Instrumentacion Digital U2Documento7 pagineProblemario Instrumentacion Digital U2Isaac SolorioNessuna valutazione finora
- Instrumentacion VirtualDocumento27 pagineInstrumentacion VirtualAnita Del Carmen Morales CruzNessuna valutazione finora
- Tarea de MecatrónicaDocumento6 pagineTarea de MecatrónicaJose VegaNessuna valutazione finora
- Adc0804 Conversor Analogo DigitalDocumento3 pagineAdc0804 Conversor Analogo DigitalSARAMELESNessuna valutazione finora
- Muestreo y RetencionDocumento4 pagineMuestreo y RetencionCesar Patiño100% (2)
- Solucionario de Forouzan-Transmision de Datos y Redes de ComunicacionesDocumento142 pagineSolucionario de Forouzan-Transmision de Datos y Redes de ComunicacionespaulNessuna valutazione finora
- U1 Musica y TecnologiaDocumento18 pagineU1 Musica y TecnologiaruthdfgNessuna valutazione finora
- Tecnologia Del AutomovilDocumento106 pagineTecnologia Del AutomovilGuille Comunicar100% (1)
- SERVOVALVULASDocumento20 pagineSERVOVALVULASGabriel CarNessuna valutazione finora
- Control de Dispositivos Por USBDocumento55 pagineControl de Dispositivos Por USBEnrico Mega100% (2)
- Motorola Mtr3000 Mototrbo Repeater Sales Guide Es 111810Documento11 pagineMotorola Mtr3000 Mototrbo Repeater Sales Guide Es 111810Elias CossioNessuna valutazione finora
- Guía de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - Reconocer Los Elementos Matemáticos Que Implica El Sistema de Conversión AnalógicaDocumento11 pagineGuía de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - Reconocer Los Elementos Matemáticos Que Implica El Sistema de Conversión AnalógicaNaimersoft SolucionesNessuna valutazione finora
- Actividad de Ingenierìa de Telecomunicaciones de La Unidad IiDocumento12 pagineActividad de Ingenierìa de Telecomunicaciones de La Unidad Iinelly guzmanNessuna valutazione finora
- Practica 6Documento7 paginePractica 620204566Nessuna valutazione finora
- Tema 16. Codificación PCM para Ensayos en VueloDocumento13 pagineTema 16. Codificación PCM para Ensayos en VueloMiguel Andres PERSONALNessuna valutazione finora
- Tutorial ProteusDocumento22 pagineTutorial ProteusChema Juarez100% (1)
- Informe Protocolo HartDocumento4 pagineInforme Protocolo HartMiguelEnriqueLoorPlazaNessuna valutazione finora
- TallerDocumento13 pagineTallerMaleja TellezNessuna valutazione finora