Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Robotic A
Caricato da
joselo18000Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Robotic A
Caricato da
joselo18000Copyright:
Formati disponibili
C
u
a
d
e
r
n
i
l
l
o
d
e
a
c
t
i
v
i
d
a
d
e
s
Nombre del alumno: ________________________________________
Grupo _____________ Grado ____________________
Docente ______________________
CEDIP Cuadernillo de actividades
1
OBJETIVO
Desarrollar en los adolescentes la capacidad de planear, ejecutar, evaluar y redireccionar lo que
hacen, ya sea en la vida personal como en la seleccin de carrera, de tal forma que la adolescencia
se convierta en bsqueda de solidez fsica y profesional:
Aumentar la autoestima y responsabilidad.
Establecer o fijar objetivos.
Ampliar conocimientos.
Desarrollar habilidades de modelado.
Pensamiento lgico, crtico y secuenciacin.
Ayuda en la solucin de problemas y toma de decisiones.
PROGRAMA
Unidad 1.- Introduccin a la robtica
1.1 Qu es la robtica?
1.2 Breve historia de la robtica y sus leyes.
1.3 Definicin de robot.
1.4 Aplicaciones de los robots.
1.5 Estructura mecnica de los robots.
1.6 Sistema de control (sistema nervioso)
Unidad 2.- Uso de bandas y engranes.
2.1 Engranes
2.2 Tipos de engranes
2.3 Bandas y poleas
2.4 Tipo de bandas
Unidad 3.- Introduccin a la electrnica
3.1 Definicin de corriente elctrica
3.2 Corriente alterna y contina
3.3 Fenmenos asociados a la corriente
elctrica.
3.4 Pilas elctricas
3.5 Ley de ohm
3.6 Resistencias
3.7 Asociacin serie y paralelo
3.8 Comprobacin de resistencia
3.9 Capacitores
3.9.1 Asociacin serie paralelo (capacitores)
Unidad 4.- Bobinas, diodos y transistores
4.1 Bobina
4.2 Diodos
4.3 Transistores
Unidad 5.- Circuito integrado 555
5.1. Concepto de circuito integrado
5.2. Practicas
Unidad 6.- Armar brazo mecnico.
CEDIP Cuadernillo de actividades
2
Qu es para ti o que representa la DISCIPLINA?
Consideras que un ROBOT deber tiene disciplina. Por qu?
ROBTICA
Es una disciplina que combina todas aquellas actividades relacionados con el
Estudio
Diseo
Construccin
Operacin
Mantenimiento
Es la coordinacin de actitudes con las cualidades se instruye para
desarrollar habilidades, o para seguir un determinado cdigo de
conducta u orden
de un
ROBOTICA
Ingeniera
Elctrica
Ingeniera
Electnica
Ingeniera
Mecnica
Ciencias de la
Computacin
Matematicas
Fisica
Biologia
Neurociencias
Es un campo de trabajo se combinan
diferentes disciplinas como:
Actividad: Describe cada una de las anteriores disciplina y como se
combinan con la ROBOTICA
Otras disciplinas Relacionadas:
R
o
b
o
t
i
c
a
Visin
computacional
Inteligencia artificial
Ciberntica
Mecatronica .
CEDIP Cuadernillo de actividades
4
Historia de la robtica
1920: Karel Capek emplea por primera vez la palabra checa robota (trabajo tedioso en espaol) para referirse a un
humanoide mecnico (no biolgico) La palabra apareci en una obra de teatro en Londres, rpidamente el trmino se
export a casi todos los idiomas del Mundo.
1938: Los americanos Willard Pollard y Harold Roselund fabrican la primera maquina para pintar con spray. La mquina
fue fabricada para la empresa "DeVilbiss". A fecha de hoy aquella empresa sigue abierta
1942: Isaac Asimov publica las tres leyes de la robtica. Leyes que marcan la supeditacin de los robots a la voluntad
humana. Estas leyes se ponen de moda especialmente a finales de siglo XX, al introducirse la robtica en los hogares y
plantearse un problema tico y de seguridad civil.
1951: Raymond Goertz disea el primer brazo mecnico manejado a distancia para la Comisin de la Energa Atmica.
La comisin se fund en 1946, al final de la Segunda Guerra Mundial. La supremaca de los tanques en este conflicto
puso de manifiesto la necesidad de llevar la revolucin industrial del siglo XIX al Ejercito.
1954: George Devol disea el primer robot programable comercial. Se comercializara a partir de 1961. Mas tarde el Sr.
Devol fundara "Unimation", la primera empresa de robtica de la historia.
1959: Se funda el Artificial Intelligence Laboratory en el MIT. El MIT ha sido la piedra angular en robtica universitaria
durante el siglo XX, solo comparable al Robotics Institute de laCarnegie Melon University.
1959: Sale al mercado el primer robot comercial.El robot se llam "Versatran".
1965: Se funda el Robotics Institute en la Carnegie Melon University. Hoy en dia el "RI de la CMU" es como un
"supermercado tecnologico", desarrollan cientos de robots gracias a una tremenda red de subvenciones.
1973: Aparece el primer robot controlado por un mini-ordenador, el robot es el T3. Los "mini-ordenadores" de esta
poca pesaban habitualmente ms 30 kilos.
1974: Hay 3500 robots en uso en el mundo Su utilidad de demostro en la Industria, el concepto de "Robot de Servicio"
todavia no exista.
1976: El robot de la NASA Vinking II aterriza en Marte. Dispona de un brazo robtico articulado.
1978: Empiezan a surgir numerosas empresas dedicadas a la fabricacin de robots para la industria. Solo en la dcada
de los 80 y en EEUU surgen ms de 10 empresas de gran capital social, fundadas desde sus respectivas corporaciones
matriz del sector Industrial.
CEDIP Cuadernillo de actividades
5
1986: HONDA, la empresa Japonesa inicia un proyecto para construir un robot humanoide, su evolucin y sus
numerosos problemas se mantienen en secreto. Muchos cientficos consideran que HONDA no lograr su objetivo, tanto
en Estados Unidos como en Japon.
1997: HONDA presenta P3 un enorme robot humanoide. Cuando los resultados se hicieron publicos muchos
investigadores que trabajaban en proyectos similares se quedaron atonitos, sus proyectos estaban a aos luz de los
resultados obtenidos por HONDA.
1999: SONY lanza "Aibo" un perro-robot. Los resultados en forma de publicidad gratuita que HONDA ha obtenido
provocan una carrera de marketing tecnolgico entre empresas de tecnologa en Japn.
2000: SONY presenta un pequeo humanoide en la Robodex 2000. Mientras los EEUU miran a sus robots en Marte,
Japn mira a sus robots a la cara. Cada uno en su terreno es el rey de la robtica.
2003: Aquel robot humanoide de SONY, Qrio, se convierte en el primer humanoide comercial completamente autnomo
capaz de correr. HONDA sera el primero en caminar, pero SONY el primero en correr. La carrera esta abierta y otras
empresas anuncian su proposito de unirse.
2004: Primera edicion del "Darpa Grand Challenge" La guerra de Irak de 2003 y sus numerosas bajas puso en evidencia
la necesidad de reducir las bajas militares estadounidenses en futuros conflictos. Se multiplica la financiacion de este tipo
de proyectos.
Primer robot humanoide ASIMO, su pasado: El primer gran humanoide que realmente llego a la sociedad fue el robot
diseado y fabricado por HONDA desde 1986 hasta la actualidad.
Otros robots bpedos y humanoides tambin destacaron durante este tiempo, pero "el robot que recibio el nombre de
ASIMO" fue el principal referente. Por encima de proyectos desarrollados en el Instituto Tecnolgico de Massachussets o
la Universidad Carnegie Mellon. El ao 1986:
En 1986 los ingenieros de Honda empezaron a trabajar en la problemtica de caminar, la pregunta era qu necesita un
robot para poder caminar dinmicamente?, hasta esa fecha muchos documentos cientficos haban sealado la dificultad
de fabricar robots caminantes, pero muy pocos cientficos se atrevan a sealar la respuesta a la pregunta.
El primer ingenio robtico de HONDA era el E0, diseado en 1986, para la poca era un autentico prodigio que poda
moverse sobre dos piernas no sin caerse en numerosas ocasiones.
Las versiones E: Entre 1987 y 1991 HONDA trabaj en las siguientes versiones del robot: E1, E2, E3.
Entre 1991 y 1993 con las nuevas versiones E4, E5 y E6 se empezaron a emplear conceptos como el ZMP (Zero
Moment Point), que hoy en da componen el ABC de la robtica bpeda.
Durante esta epoca el proyecto se mantuvo bajo un relativo secretismo, diversas instituciones saban que HONDA
estaba trabajando en robtica humanoide pero pocos se podan imaginar los avances que los cientficos nipones estaban
alcanzando. Las versiones P:
Entre 1993 y 1997 surgieron P1, P2 y P3, autenticas maquinas humanoides con tanto nivel de detalle que el pblico
empez a asombrarse con los resultados obtenidos. El modelo ms voluminoso lleg a ser el P2 que pesaba 210 Kg y
meda 1,82 mts. ASIMO, la vision comercial:
Cuando HONDA lleg a estos extremos, en los que vea claramente que controlaba la robtica humanoide bsica (la
capacidad de caminar) analiz sus posibilidades comerciales, llegando a la conclusin de que un robot que pudiera
aplastar a su propietario no era muy comercial.
CEDIP Cuadernillo de actividades
6
Entonces surgi ASIMO, un pequeo robot de 1,20 cm de altura y 43 kg de peso que podra maravillar al mundo saliendo
en la televisin sin riesgo para sus coetneos.
En realidad ASIMO ha cambiado mucho desde su primera aparicin a principios de milenio. En un principio pesaba 54
Kg. pero a base de "dieta tecnolgica" ha pasado a pesar 43 Kg. (en Enero de 2004).
La "dieta tecnolgica" ms popular es sin lugar a dudas la Japonesa, la cultura de la nanotecnologia y miniaturizacion
arrasa en el mercado tecnologico japones y eso se traduce en perdidas de peso para ASIMO.
Actividad: Realiza una lnea del tiempo sobre la historia de la ROBOTICA.
Continuando con la historia:
El trmino robot fue introducido por el checo Karel Capek en 1921,
y viene de la combinacin de las palabras checas robota que
significa trabajo obligatorio y robotnik que significa siervo.
La palabra robtica fue utilizada por primera vez por el
cientfico y escritor de ciencia ficcin Isaac Asimov en 1942.
El propuso las llamadas leyes de la robtica.
CEDIP Cuadernillo de actividades
7
Actividad: Realiza un dibujo como representara cada una de las leyes de la
robtica en cada espacio correspondiente en el cuadro anterior.
Los primeros robots industriales modernos fue denominados
Unimates y desarrollados a finales de la dcada de los 50s y
principios de los 60s por George
En base a desarrollos
posteriores
Engelberger es
considerado como el padre de la robtica. A finales de
la dcada de los 70s y principios de los 80s el desarrollo
de los robots industriales tuvo un rpido desarrollo debido
principalmente a grandes inversiones desarrolladas por la
industria automotriz.
LEY 0
Un robot no puede
realizar ninguna
accin, ni por
inaccin permitir
que nadie la
realice, que resulte
perjudicial para la
humanidad, aun
cuando ello entre
en conflicto con
las otras leyes.
Ley 1
Un robot no puede
daar a un ser
humano ni, por
inaccin, permitir
que ste sea
daado.
Ley 2
Un robot debe
obedecer las
rdenes dadas por
los seres humanos
excepto cuando
estas rdenes
entren en conflicto
con las leyes
anteriores
Ley 3
Un robot debe
proteger su propia
existencia hasta
donde esta
proteccin no
entre en conflicto
con las leyes
anteriores.
CEDIP Cuadernillo de actividades
8
Preguntas son preguntas. Contestar las siguientes preguntas
1 Cul consideras que es la utilidad de un robot?
2 Piensa en tu robot ideal, cuales cualidades consideraras que son necesarias para tu
robot y por qu?
3 Describe un ejemplo donde se aplica un robot?
ROBOT
Es un dispositivo reprogramable y multifuncional diseado
para mover materiales, piezas, herramientas o
dispositivos especializados a travs de movimientos
programados
Existen mltiples tipos de robots, cuya complejidad va
desde aquellos que se utilizan en tareas industriales de
ensamblado (ej. fbricas de autos) hasta llegar a los de
aspecto humano (humanoides).
Aplicaciones de los robots.
Los robots son utilizados en una diversidad de aplicaciones, desde robots tortugas en los
salones de clases, robots soldadores en la industria automotriz, hasta brazos teleoperados en el
transbordador espacial.
Cada robot lleva consigo su problemtica propia y sus soluciones afines; no obstante que
mucha gente considera que la automatizacin de procesos a travs de robots est en sus inicios, es
un hecho innegable que la introduccin de la tecnologa robtica en la industria, ya ha causado un
gran impacto. En este sentido la industria Automotriz desempea un papel preponderante.
CEDIP Cuadernillo de actividades
9
Es necesario hacer mencin de los problemas de tipo social, econmicos e incluso poltico, que
puede generar una mala orientacin de robotizacin de la industria. Se hace indispensable que la
planificacin de los recursos humanos, tecnolgicos y financieros se realice de una manera
inteligente.
Por el contrario la Robtica contribuir en gran medida al incremento de el empleo. Pero, como se
puede hacer esto? al automatizar los procesos en mquinas ms flexibles, reduce el costo de
maquinaria, y se produce una variedad de productos sin necesidad de realizar cambios importantes
en la forma de fabricacin de los mismo. Esto originara una gran cantidad de empresas familiares
(Micro y pequeas empresas ) lo que provoca la descentralizacin de la industria.
a) Industrial. Los robots son utilizados por una diversidad de procesos industriales como lo
son : la soldadura de punto y soldadura de arco, pinturas de spray, transportacin de
materiales, molienda de materiales, moldeado en la industria plstica, mquinas-
herramientas, y otras ms.
A continuacin se har una breve explicacin de algunas de ellas.
b) Aplicacin de transferencia de material
Las aplicaciones de transferencia de material se definen como operaciones en las cuales el
objetivo primario es mover una pieza de una posicin a otra. Se suelen considerar entre las
operaciones ms sencillas o directas de realizar por los robots. Las aplicaciones normalmente
necesitan un robot poco sofisticado, y los requisitos de enclavamiento con otros equipos son
tpicamente simples.
ROBOT
CEDIP Cuadernillo de actividades
10
c) Carga y descarga de maquinas
Estas aplicaciones son de manejos de material en las que el robot se utiliza para servir a una
mquina de produccin transfiriendo piezas a/o desde las mquinas. Existen tres casos que caen
dentro de sta categora de aplicacin:
Carga/Descarga de Mquinas. El robot carga una pieza de trabajo en bruto en el proceso y
descarga una pieza acabada. Una operacin de mecanizado es un ejemplo de este caso.
Carga de mquinas. El robot debe de cargar la pieza de trabajo en bruto a los materiales en
las mquinas, pero la pieza se extrae mediante algn otro medio. En una operacin de
prensado, el robot se puede programar para cargar lminas de metal en la prensa, pero las
piezas acabadas se permite que caigan fuera de la prensa por gravedad.
Descarga de mquinas. La mquina produce piezas acabadas a partir de materiales en
bruto que se cargan directamente en la mquina sin la ayuda de robots. El robot descarga la
pieza de la mquina. Ejemplos de sta categora incluyen aplicaciones de fundicin de
troquel y moldeado plstico.
La aplicacin se tipifica mejor mediante una clula de trabajo con el robot en el centro que consta de
la mquina de produccin, el robot y alguna forma de entrega de piezas.
Operaciones de procesamiento. Adems de las aplicaciones de manejo de piezas, existe una gran
clase de aplicaciones en las cuales el robot realmente efecta trabajos sobre piezas. Este trabajo
casi siempre necesita que el efector final del robot sea una herramienta en lugar de una pinza.
Por tanto la utilizacin de una herramienta para efectuar el trabajo es una caracterstica distinta de
este grupo de aplicaciones. El tipo de herramienta depende de la operacin de procesamiento que
se realiza.
Soldadura por puntos. Como el trmino lo sugiere, la soldadura por puntos es un proceso en
el que dos piezas de metal se soldan en puntos localizados al hacer pasar una gran
corriente elctrica a travs de las piezas donde se efecta la soldadura.
Soldadura por arco continua. La soldadura por arco es un proceso de soldadura continua en
oposicin a la soldadura por punto que podra llamarse un proceso discontinuo. La
soldadura de arco continua se utiliza para obtener uniones largas o grandes uniones
soldadas en las cuales, a menudo, se necesita una cierre hermtico entre las dos piezas de
metal que se van a unir. El proceso utiliza un electrodo en forma de barra o alambre de
metal para suministrar la alta corriente elctrica de 100 a 300 amperes.
Recubrimiento con spray. La mayora de los productos fabricados de materiales metlicos
requieren de alguna forma de acabado de pintura antes de la entrega al cliente. La
tecnologa para aplicar estos acabados varia en la complejidad desde mtodos manuales
simples a tcnicas automticas altamente sofisticadas. Se dividen los mtodos de
recubrimiento industrial en dos categoras:
1. Mtodos de recubrimiento de flujo e inmersin.
2. Mtodos de recubrimiento al spray.
CEDIP Cuadernillo de actividades
11
Los mtodos de recubrimiento mediante flujo de inmersin se suelen considerar que son
mtodos de aplicar pintura al producto de baja tecnologa. La inmersin simplemente requiere
sumergir la pieza o producto en un tanque de pintura liquida.
d) Otras operaciones de proceso. Adems de la soldadura por punto, la soldadura por arco, y
el recubrimiento al spray existe una serie de otras aplicaciones de robots que utilizan alguna
forma de herramienta especializada como efector final. Operaciones que estn en sta
categora incluyen: Taladro, acanalado, y otras aplicaciones de mecanizado. Rectificado,
pulido, desbarbado, cepillado y operaciones similares. Remachado, Corte por chorro de
agua.
Taladro y corte por lser.
e) Laboratorios. Los robots estn encontrando un gran nmero de aplicaciones en los
laboratorios. Llevan acabo con efectividad tareas repetitivas como la colocacin de tubos de
pruebas dentro de los instrumentos de medicin. En sta etapa de su desarrollo los robots
son utilizados para realizar procedimientos manuales automatizados. Un tpico sistema de
preparacin de muestras consiste de un robot y una estacin de laboratorio, la cual contiene
balanzas, dispensarios, centrifugados, racks de tubos de pruebas, etc.
Las muestras son movidas desde la estacin de laboratorios por el robot bajo el control de
procedimientos de un programa. Los fabricantes de estos sistemas mencionan tener tres ventajas
sobre la operacin manual: incrementan la productividad, mejoran el control de calidad y reducen la
exposicin del ser humano a sustancias qumicas nocivas.
Las aplicaciones subsecuentes incluyen la medicin del pH, viscosidad, y el porcentaje de slidos en
polmeros, preparacin de plasma humano para muestras para ser examinadas, calor, flujo, peso y
disolucin de muestras para presentaciones espectromticas.
f) Manipuladores cinematicos . La tecnologa robtica encontr su primer aplicacin en la
industria nuclear con el desarrollo de teleoperadores para manejar material radiactivo. Los robots
ms recientes han sido utilizados para soldar a control remoto y la inspeccin de tuberas en reas
de alta radiacin.
El accidente en la planta nuclear de Three Mile Island en Pennsylvania en 1979 estimul el
desarrollo y aplicacin de los robots en la industria nuclear. El reactor numero 2 (TMI-2) predio su
enfriamiento, y provoc la destruccin de la mayora del reactor, y dejo grandes reas del reactor
contaminadas, inaccesible para el ser humano.
Debido a los altos niveles de radiacin las tareas de limpieza solo eran posibles por medios
remotos. Varios robots y vehculos controlados remotamente han sido utilizados para tal fin en los
lugares donde ha ocurrido una catstrofe de este tipo. sta clase de robots son equipados en su
mayora con sofisticados equipos para detectar niveles de radiacin, cmaras, e incluso llegan a
traer a bordo un minilaboratorio para hacer pruebas.
g) Agricultura. Para muchos la idea de tener un robot agricultor es ciencia ficcin, pero la
realidad es muy diferente; o al menos as parece ser para el Instituto de Investigacin Australiano, el
cual ha invertido una gran cantidad de dinero y tiempo en el desarrollo de este tipo de robots. Entre
CEDIP Cuadernillo de actividades
12
sus proyectos se encuentra una mquina que esquila a la ovejas. La trayectoria del cortador sobre el
cuerpo de las ovejas se planea con un modelo geomtrico de la oveja.
Para compensar el tamao entre la oveja real y el modelo, se tiene un conjunto de sensores
que registran la informacin de la respiracin del animal como de su mismo tamao, sta es
mandada a una computadora que realiza las compensaciones necesarias y modifica la trayectoria
del cortador en tiempo real.
Debido a la escasez de trabajadores en los obradores, se desarrolla otro proyecto, que
consiste en hacer un sistema automatizado de un obrador, el prototipo requiere un alto nivel de
coordinacin entre una cmara de vdeo y el efector final que realiza en menos de 30 segundos ocho
cortes al cuerpo del cerdo.
Por su parte en Francia se hacen aplicaciones de tipo experimental para incluir a los robots
en la siembra, y poda de los viedos, como en la pizca de la manzana.
h) Espacio . La exploracin espacial posee problemas especiales para el uso de robots. El
medio ambiente es hostil para el ser humano, quien requiere un equipo de proteccin muy costoso
tanto en la Tierra como en el Espacio. Muchos cientficos han hecho la sugerencia de que es
necesario el uso de Robots para continuar con los avances en la exploracin espacial; pero como
todava no se llega a un grado de automatizacin tan precisa para sta aplicacin, el ser humano
an no ha podido ser reemplazado por estos. Por su parte, son los teleoperadores los que han
encontrado aplicacin en los transbordadores espaciales.
En Marzo de 1982 el transbordador Columbia fue el primero en utilizar este tipo de robots,
aunque el ser humano participa en la realizacin del control de lazo cerrado.
Algunas investigaciones estn encaminadas al diseo, construccin y control de vehculos
autnomos, los cuales llevarn a bordo complejos laboratorios y cmaras muy sofisticadas para la
exploracin de otros planetas.
En Noviembre de 1970 los Rusos consiguieron el alunizaje del Lunokhod 1, el cual posea
cmaras de televisin, sensores y un pequeo laboratorio, era controlado remotamente desde la
tierra.
En Julio de 1976, los Norteamericanos aterrizaron en Marte el Viking 1, llevaba abordo un
brazo robotizado, el cual recoga muestras de piedra, tierra y otros elementos las cuales eran
analizados en el laboratorio que fue acondicionado en el interior del robot. Por supuesto tambin
contaba con un equipo muy sofisticado de cmaras de vdeo.
i) Vehculos submarinos . Los eventos durante el verano de 1985 provocaron el incremento
por el inters de los vehculos submarinos. En el primero - Un avin de la Air Indian se estrell en el
Ocano Atlntico cerca de las costas de Irlanda - un vehculo submarino guiado remotamente,
normalmente utilizado para el tendido de cable, fue utilizado para encontrar y recobrar la caja negra
del avin.
El segundo fue el descubrimiento del Titanic en el fondo de un can, donde haba
permanecido despus del choque con un iceberg en 1912, cuatro kilmetros abajo de la superficie.
CEDIP Cuadernillo de actividades
13
Un vehculo submarino fue utilizado para encontrar, explorar y filmar el hallazgo.
En la actualidad muchos de estos vehculos submarinos se utilizan en la inspeccin y mantenimiento
de tuberas que conducen petrleo, gas o aceite en las plataformas ocenicas; en el tendido e
inspeccin del cableado para comunicaciones, para investigaciones geolgicas y geofsicas en el
suelo marino.
La tendencia hacia el estudio e investigacin de este tipo de robots se incrementar a
medida que la industria se interese an ms en la utilizacin de los robots, sobra mencionar los
beneficios que se obtendran si se consigue una tecnologa segura para la exploracin del suelo
marino y la explotacin del mismo.
j) Educacin .Los robots estn apareciendo en los salones de clases de tres distintas
formas. Primero, los programas educacionales utilizan la simulacin de control de robots como un
medio de enseanza. Un ejemplo palpable es la utilizacin del lenguaje de programacin del robot
Karel, el cual es un subconjunto de Pascal; este es utilizado por la introduccin a la enseanza de la
programacin.
El segundo y de uso ms comn es el uso del robot tortuga en conjuncin con el lenguaje LOGO
para ensear ciencias computacionales. LOGO fue creado con la intencin de proporcionar al
estudiante un medio natural y divertido en el aprendizaje de las matemticas.
En tercer lugar est el uso de los robots en los salones de clases. Una serie de manipuladores
de bajo costo, robots mviles, y sistemas completos han sido desarrollados para su utilizacin en los
laboratorios educacionales. Debido a su bajo costo muchos de estos sistemas no poseen una
fiabilidad en su sistema mecnico, tienen poca exactitud, no existen los sensores y en su mayora
carecen de software
Realiza un mapa mental de las aplicaciones de los robots.
CEDIP Cuadernillo de actividades
14
Estructura Mecnica de un Robot.
Un robot esta formado por los siguientes elementos:
Estructura mecnica
Transmisiones
Sistema de accionamiento
Sistema sensorial
Sistema de control
Elementos terminales.
Aunque los elementos empleados en los robots no son exclusivos de estos (maquinas herramientas
y otras muchas maquinas emplean tecnologas semejantes), las altas prestaciones que se exigen a
los robots han motivado que en ellos se empleen elementos con caractersticas especificas.
Mecnicamente, un robot esta formado por una serie de elementos o eslabones unidos
mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones
consecutivos. |
La constitucin fsica de la mayor parte de los robots industriales guarda cierta similitud con
la anatoma del brazo humano, por lo que en ocasiones, para hacer referencia a los distintos
elementos que componen el robot, se usan trminos como cuerpo, brazo, codo y mueca
.
CEDIP Cuadernillo de actividades
15
Sistema de control (sistema nervioso)
La funcin de este sistema es controlar las acciones que ejecuta el robot de tal forma que pueda
cumplir con la tarea que le ha sido asignada y tomando en consideracin la informacin del medio
ambiente.
Este sistema de control corresponde a una suerte de sistema nervioso del robot, el cual puede variar
en complejidad, de igual forma como vara la complejidad del sistema nervioso de los diferentes
animales (humano v/s insecto).
Las acciones a desarrollar por un robot son gatilladas por la informacin que ste capta del medio
ambiente, pero considerando el estado interno (mental) del mismo y la tarea a realizar.
Robot
Tarea Medio
Ambiente
Percepcin
Modelacin
Planificacin
Ejecucin de la Tarea
Control de los Actuadores
Sensore
Actividad realiza un mapa mental de Introduccin a la Robtica.
Contesta el siguiente cuadro.
Lo nuevo Lo til Lo trascedente
CEDIP Cuadernillo de actividades
16
Uso de bandas y engranes.
Realiza un dibujo de tres engranes unidos.
Nombre del video:
Cmo funcionan las cosas 5. Diversin en la
feria (Engranajes y transmisiones).
http://www.youtube.com/watch?feature=player_embedded&v=SC7Gj8qASqc
Contesta las siguientes preguntas.
1. Cul es la idea de Frank, el padre de Olivia?
2. Cul es la idea de Pilbeam,el to de Olivia?.
3. Qu conseguimos moviendo el pivote?
4. Cuntos engranajes tiene el sistema? Al mover el engranaje exterior que conseguimos en
el interior?
5. Cmo consiguieron que girase ms rpido el carrusel?
6. Qu es un engranaje?
7. Cuanto mayor sea la relacin de tamao entre las dos ruedas cmo ser la relacin de sus
velocidades?
8. Dos ruedas se conectan en ngulo para cambiar la direccin de la rotacin:
9. Qu tipo de engranaje est formado por una barra estriada que engrana una rueda
dentada para alterar la direccin del movimiento?, adems slo funciona en un sentido.
CEDIP Cuadernillo de actividades
17
10. Qu tipo de engranaje una rueda dentada engrana una barra estriada?
11. Qu tipo de engranaje se utilizara para transformar el movimiento circular en alternativo,
izquierda-derecha?
12. Al conectar dos ruedas dentadas Qu ocurre con su sentido de giro?
13. Qu engranajes se utilizan en las bicicletas?
14. Cita dos ejemplos de utilizacin de engranajes que no se hayan comentado en el vdeo.
15. Qu hicieron para reducir la velocidad de giro de la rueda del carrusel?
16. Qu tipo de engranajes utiliza la batidora de huevos?
17. En qu sentido giran los dos engranajes de la batidora de huevos? por qu?
18. Segn el Inventor qu necesitaran para que funcione el carrusel?
19. Qu utilizaba para afilar una herramienta?
20. Qu va a utilizar en lugar de engranajes?
21. Qu otros dos mecanismos utiliza Troy para impulsar el carrusel adems de la manivela?
22. Por qu la noria central tiene dos poleas de diferente dimetro?
ENGRANES. Engranaje es una rueda o cilindro dentado
empleado para transmitir un movimiento giratorio o alternativo
desde una parte de una mquina a otra.
Un conjunto de dos o ms engranajes que transmite el
movimiento de un eje a otro se denomina tren de engranajes.
Los engranajes se utilizan sobre todo para transmitir movimiento
giratorio, pero usando engranajes apropiados y piezas dentadas
planas pueden transformar movimiento alternativo en giratorio y
viceversa.
Circunferencia primitiva es aquella en que tericamente ruedan las ruedas y sobre sta se
define la relacin de transmisin del engrane.
Circunferencia de cabeza es la que limita la parte exterior del engranaje.
Circunferencia de pie es la que limita la parte inferior de los dientes.
Paso circunferencial es la longitud medida sobre la circunferencia primitiva entre los ejes de
simetra de dos dientes consecutivos.
Cabeza del diente es la parte de ste comprendida entre las circunferencias primitiva y de
cabeza.
Pie del diente es la parte de ste comprendida entre las circunferencias primitiva y de pie.
Altura de cabeza, de pie y total son las longitudes medidas sobre los ejes de simetra entre la
circunferencia primitiva y la de cabeza, pie, y la suma de stas, respectivamente.
Espesor y anchura son las medidas de la seccin de un diente en la circunferencia primitiva.
CEDIP Cuadernillo de actividades
18
Para que nos sirve.
Utilizado para transmitir potencia de un componente a otro dentro de una mquina. Los
engranajes estn formados por dos ruedas dentadas, de las cuales la mayor se denomina 'corona' y
la menor 'pin'.
Un engranaje sirve para transmitir movimiento circular mediante contacto de ruedas
dentadas. Una de las aplicaciones ms importantes de los engranajes es la transmisin del
movimiento desde el eje de una fuente de energa, como puede ser un motor de combustin interna
o un motor elctrico, hasta otro eje situado a cierta distancia y que ha de realizar un trabajo. De
manera que una de las ruedas est conectada por la fuente de energa y es conocido como
engranaje motor y la otra est conectada al eje que debe recibir el movimiento del eje motor y que se
denomina engranaje conducido. Si el sistema est compuesto de ms de un par de ruedas
dentadas, se denomina 'tren.
Tipos de engranajes
La principal clasificacin de los engranajes se efecta segn la disposicin de sus ejes de rotacin y
segn los tipos de dentado. Segn estos criterios existen los siguientes tipos de engranajes:
1.- Engranaje de ruedas rectas o engranaje plano.
Para ejes alejados se usan ruedas dentadas y cadenas cuyos
eslabones encajan entre los dientes de las ruedas.
Las ruedas dentadas y la cadena funcionan como las poleas,
pero con la seguridad de los engranajes.
2.- Engranaje de cremallera y pin, convierte un movimiento lineal en
movimiento rotativo.
CEDIP Cuadernillo de actividades
19
3.- Tornillo sin fin o sin fin corona. En este engranaje siempre
es el tornillo el que mueve la rueda dentada y nunca al
contrario
4.- Engranaje de ruedas cnicas
Importante El tamao de las poleas, de los engranajes o de las ruedas dentadas de una transmisin
influye en la rapidez con que giran a la misma velocidad.
Cuando las ruedas son iguales, giran a la misma velocidad.
Si las ruedas son diferentes, la de menor tamao gira ms rpida.
La rueda grande tiene el doble de dientes que la pequea. Cada
vez que da una vuelta, la rueda pequea da dos.
Proyectos
CEDIP Cuadernillo de actividades
20
Bandas y poleas
Nombre del video:
0.6 Poleas
http://www.youtube.com/watch?feature=player_detailpage&v=wB3YzXRv1Bg
Contesta las siguientes preguntas.
1.Polea en ingls
2. Qu es una polea?
3. Cmo pueden elevar al mamut con la mitad del esfuerzo?
4. Cuntas poleas son necesarias para elevar el peso realizando la dcima parte del esfuerzo?
5. Por qu no se desploma la gra?
6. Qu utiliza una gra de cadena? cuntas ruedas tiene?
7. A qu estn conectados los peldaos de una escalera mecnica?
8. Qu impulsa una escalera mecnica?.
Poleas. Dispositivo mecnico de traccin o elevacin, formado por una
cuerda que rodea la circunferencia de la rueda.
Tanto la polea como la rueda y el eje pueden considerarse mquinas
simples que constituyen casos especiales de la palanca. Una polea fija no
proporciona ninguna ventaja mecnica, es decir, ninguna ganancia en la
transmisin de la fuerza: slo cambia la direccin o el sentido de la fuerza
aplicada a travs de la cuerda. Sin embargo, con un sistema de poleas
mviles (tambin llamado polipasto) s es posible obtener una ventaja
o ganancia mecnica, que matemticamente se define como el
cociente entre la fuerza de salida (carga) y la fuerza de entrada
(esfuerzo). En el caso ideal la ganancia mecnica es igual al nmero
de segmentos de cuerda que sostienen la carga que se quiere mover,
excluido el segmento sobre el que se aplica la fuerza de entrada
(vase la animacin adjunta). El rozamiento reduce la ganancia
mecnica real, y suele limitar a cuatro el nmero total de poleas.
CEDIP Cuadernillo de actividades
21
Clases de poleas
1. Polea fija: esta polea esta fija a la viga, una polea fija simple es de echo una palanca de
primera clase con brazos iguales. Sirve nicamente para cambiar la direccin o el sentido de
la fuerza, la carga solo es soportada por un segmento de la cuerda.
2. Polea mvil: esta polea est unida al objeto y no a la viga, una polea mvil siempre es una
palanca de segunda clase, que multiplica la fuerza ejercida, la carga es soportada por
ambos segmentos de cuerda, porque solo hace falta una fuerza igual a la mitad del peso
para levantar la carga. Sin embargo hay que tirar de la cuerda a una mayor distancia.
3. Polea compuesta (polipasto): muchas veces tirar hacia abajo resulta mas fcil que hacia
arriba, se aade una polea fija para cambiar el sentido del esfuerzo
Bandas:
Es un elemento mecnico muy flexible utilizado
para transmitir potencia cuando existen poleas
unidas a flechas o ejes. Su apariencia es la de una
lnea unida extremo con extremo, con un seccin
trasversal que vara segn sea su tipo.
a. Materiales de elaboracin. Al principio eran elaboradas con fibras naturales con cuero de
animales y se utilizaban en mquinas en donde la exactitud de la transmisin no fuera
determinante.
b. La duracin depende de su uso, mantenimiento y trato, pero las de cuero o las de fibras
naturales se fueron haciendo obsoletas por desgastarse rpidamente. Las que actualmente
se utilizan estn elaboradas de alambres con caucho a su alrededor, son ms resistentes,
CEDIP Cuadernillo de actividades
22
durables y permiten tener una trasmisin poco ruidosa y libre de patinajes, a estas se les
puede aadir una capa de fibras sintticas baadas en caucho para protegerlas.
c. Montaje. A comparacin de la transmisin por engranes la transmisin por banda es poco
ruidosa, ms econmica y permite ser utilizada en ejes o flechas que no estn paralelas, su
desventaja material ms importante es su rpido desgaste y su posible ruptura inmediata.
Las bandas pueden transmitir la potencia entre dos o ms poleas siempre que sean del mismo tipo,
adems pueden doblarse cuando las flechas o ejes no estn paralelos, a excepcin de las bandas
sin deslizamiento. Al instalarse se debe tensar conforme a especificaciones por correr el riesgo de
salirse de la polea. Cuando se deslizan rechinan, estos rechinidos se evitan con agentes
antipatinajes.
Tipos de bandas
Bandas deslizantes:
a) Banda plana. Fue la primera que se utiliz, y se usa en donde existen poleas planas y
abombadas. Son muy baratas pero patinan fcilmente. Estn elaboradas, comnmente, en
caucho sin reforzamiento de alambres con proteccin de fibras.
b) Banda plana tipo listn. Son muy delgadas y estn elaboradas tanto en plstico como con fibras
sintticas. Se usaban en el sistema sintonizador de los radios antiguos.
c) Banda plana de costilla. Es utilizada en motores de ms de 100 H.P. por patinar poco. Se
asemeja a un arreglo entre una banda plana y varias en V, quedando la superficie plana sin
contacto con la superficie horizontal de la polea. Es ms resistente que la plana o la V, aunque
no menos flexible. Est muy propensa a calentarse por su considerable rea de contacto con
las poleas.
d) Banda en V. Es menos propensa al patinaje que la banda plana. Se utiliza con poleas
acanaladas y ajustables en donde la transmisin debe ser por lo menos continua. Las que se
encuentran en los automviles son de caucho con alambres y proteccin de fibra. Adems de
ser ampliamente utilizada en la industria mecnica tambin se le encuentra en la electrnica
como es el caso de las videograbadoras o en las caseteras.
e) Banda en V ajustable. Cuando una banda est sujeta a trabajo rudo e intenso la mayor de las
veces no se daa toda completa, sino por secciones, debido a esto existen bandas ajustables
que estn formadas por secciones pequeas que quedan unidas con una grapa remache
Bandas
Deslizantes
No
deslizantes
Dentadas
CEDIP Cuadernillo de actividades
23
removible para posibilitar su adaptabilidad a las condiciones de trabajo y a la distancia existente
entre poleas. Es como armar pieza por pieza, pero tiene la desventaja de que los elementos de
unin se deterioran ms que las secciones elaboradas en caucho. Se les encuentra en
mquinas de trabajo rudo y en ambientes extremos como en las minas.
Bandas no deslizantes:
a) Banda plana dentada
Cuando se necesita una transmisin flexible lo ms exacta posible y que est libre de patinajes se
recurre a la banda dentada, muy utilizada cuando hay engranes unidos a las flechas o ejes. Sus
dientes se acoplan perfectamente a los engranes por lo que no patinan, pero existe el riesgo de
perderlos si estn muy tensas. Son muy utilizadas en situaciones donde debe existir sincronizacin
como es el caso del rbol de levas y el cigeal en los automviles. Tambin se le conoce como
banda de sincronizacin.
b) Banda en V dentada
Semejante a la anterior, pero con la ventaja de evitar en mayor medida los rechinidos y patinajes
pronunciados con el cambio de temperatura.
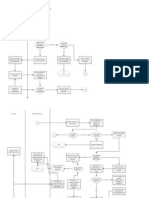
Realiza un diagrama de flujo donde describas he identifiques a los
engranes, poleas y bandas.
CEDIP Cuadernillo de actividades
24
Actividad de Autoevaluacin.
Esta actividad te servir para averiguar lo que sabes antes de trabajar este tema. Seguro
que no es la primera vez que oyes hablar de este tema. Adems te servir para saber que
contenidos se van a trabajar en esta unidad.
Marca con una cruz la casilla que creas conveniente segn lo que conoces del contenido indicado.
a. Nunca he odo de ello pero no s qu es.
b. He odo hablar de ello pero no s qu es.
c. Se lo que es pero no sabra explicarlo o hacerlo.
d. Se lo que es y sabra explicarlo o hacerlo.
a b c d
1. Que es una corriente elctrica
2. Los cuerpos conductores y los cuerpos aislantes
3. Como funciona una pila
4. Montar un circuito elctrico sencillo
5. La diferencia entre corriente continua y la corriente alterna
6. Como se representan los elementos de un circuito
7. La diferencia entre un montaje en serie y un montaje en paralelo
Contesta con ayuda de tu profesor lo siguiente:
Analizar el siguiente caso:
Si pasamos un peine por el pelo limpio y seco, y observa qu sucede?
A continuacin describe lo que sucede.
CEDIP Cuadernillo de actividades
25
Corriente electrica
Los electrones se
mueven en el
mismo sentido.
CA
Los electrones
cambian de sentido
produciendo una
alternancia.
1. Es el movimiento de las cargas negativas a travs de un conductor ___________________
2. Para medir la intensidad de la corriente elctrica se utiliza un ________________________
3. La corriente elctrica se transmite por los conductores a la velocidad de la ______________
4. En que material se presenta el flujo de electrones _________________________________
5. Existen dos tipos de corriente elctrica cuales son _____________ y __________________
Contesta correctamente el siguiente diagrama de flujo
CEDIP Cuadernillo de actividades
26
.
Fenmenos asociados con la corriente elctrica.
El paso de corriente elctrica deja a su paso una serie
de fenmenos fsicos que han sido estudiados y en algunos
casos fueron aprovechados para otros usos.
Definicin Dibujo
En todo aparato existe un calentamiento debido al funcionamiento.
Esto se debe a que no existen conductores perfectos.
Todo conductor posee una resistencia intrnseca, que aunque sea
muy baja, produce un consumo extra de energa, que al no ser
aprovechada por el equipo, es disipada al ambiente en forma de
calor.
Cuando circula corriente a travs de un conductor, se inducen
campos electromagnticos en torno al mismo.
Este principio es el que se utiliza para los motores elctricos, en
los cuales el campo que generan los bobinados de alambre de
cobre, son combinados con otros campos para producir esfuerzos
que hagan girar al rotor del motor. Los generadores aplican el
mismo principio, pero para la obtencin de energa.
Tambin puede introducir interferencias, como cuando acercamos
un cable con 220V de alterna a un cable que transporta una seal
de audio.
Si se introduce un metal dentro de un campo electromagntico
producido por corriente continua de gran intensidad, se logra
ordenar las molculas del metal, haciendo que este tome
propiedades magnticas. Esto no se produce con corriente alterna,
ya que al cambiar constantemente el sentido del campo, no se
logra ningn efecto magnetizador.
Recopila la siguiente informacin
a. Fenmeno:
b. Intrnseco
CEDIP Cuadernillo de actividades
27
Es una fuerza que se produce en todos los bobinados. Es debido a
que toda carga elctrica tiende a oponerse a la causa que le dio
origen. Las cargas inductivas como rels, bobinas, parlantes, etc.
pueden generar rebotes de corriente muy grandes.
Es la diferencia de potencial entre dos puntos de un circuito
elctrico. Su unidad de medida es el Volt.
Es la cantidad de electrones que circulan por un conductor en el
lapso de 1 segundo. Su unidad de medida es el Ampere
Es el grado de oposicin que genera un material al paso de la
corriente elctrica. Su unidad de medida es el Ohm
Es lo mismo que la resistencia. La diferencia es que la primera se
refiere a corriente continua, y la segunda para corriente alterna.
Fenmeno producido en las bobinas, las cuales presentan mayor
impedancia cuanto mayor sea la frecuencia de la corriente
aplicada. Su unidad es el Henry.
Fenmeno producido en los condensadores, los cuales presentan
menor impedancia cuanto mayor sea la frecuencia de la corriente
aplicada. Su unidad es el Faradio.
Es la inversa de la resistencia. Su unidad es el Siemens.
Pilas elctricas
Una pila elctrica es un dispositivo que
convierte energa qumica en energa elctrica por un
proceso qumico transitorio, tras lo cual cesa su
actividad y han de renovarse sus elementos
constituyentes, puesto que sus caractersticas resultan
alteradas durante el mismo. Se trata de
un generador primario.
Esta energa resulta accesible mediante dos
terminales que tiene la pila, llamados
polos, electrodos o bornes. Uno de ellos es el polo
negativo o nodo y el otro es el polo positivo o ctodo.
La estructura fundamental de una pila consiste
en dos electrodos, metlicos en muchos casos,
introducidos en una disolucin conductora de la
electricidad o electrolito.
Las pilas, a diferencia de las bateras, no son recargables, aunque segn pases y contextos los
trminos pueden intercambiarse o confundirse.
CEDIP Cuadernillo de actividades
28
Batera
Se denomina batera, batera
elctrica, acumulador elctrico o
simplemente acumulador, al dispositivo que
almacena energa elctrica, usando
procedimientos electroqumicos y que
posteriormente la devuelve casi en su totalidad;
este ciclo puede repetirse por un determinado
nmero de veces. Se trata de un generador
elctrico secundario; es decir, un generador que no
puede funcionar sin que se le haya suministrado
electricidad previamente, mediante lo que se denomina proceso de carga. Las bateras, a diferencia
de las pilas, son recargables, aunque segn pases y contextos los trminos pueden intercambiarse
o confundirse.
Actividad: Escribe la diferencia entre una pila y una batera.
Conexione de pilas en serie Conexin de pilas en paralelo
La conexin de pilas en serie se lleva acabo al
unir el polo positivo de una con el polo negativo
de otra y as sucesivamente de acuerdo con la
fuerza electromotriz que se quiere obtener.
La conexin de pilas en paralelo se efecta al
enlazar todos los polos positivos por un lado y
todos los polos negativos por otra, para as
obtener el mismo potencial.
CEDIP Cuadernillo de actividades
29
Proyecto de electricidad.
Introduccin a las actividades
Las pilas y las bateras son dispositivos de uso frecuente en la vida cotidiana. Se emplean para hacer
funcionar linternas, telfonos celulares, relojes, cmaras fotogrficas, controles remotos, computadoras,
etctera.
Cul es la clave para entender el funcionamiento de las pilas? La transformacin de energa
qumica en energa elctrica. Las reacciones de xido-reduccin son procesos en los cuales se
transfieren electrones entre especies qumicas: la especie que pierde electrones se oxida, la
especie que gana electrones se reduce. Si esta transferencia de electrones se realiza a travs de
un conductor metlico (un cable), se estar generando una corriente elctrica. En sntesis, el
corazn de una pila es una reaccin qumica.
Empleando materiales de uso cotidiano es posible armar un dispositivo que transforme
energa qumica en energa elctrica, es decir, una pila.
En el siguiente video (http://www.youtube.com/watch?v=ND1MpTcW8KE&feature=player_detailpage) un joven
presenta el armado de una pila empleando un limn y comprueba el funcionamiento del dispositivo: Cmo hacer una
pila con limn?:
Luego de ver el video, trabajen en pequeos grupos y aborden los siguientes tems:
a) Empleen un procesador de texto de sus equipos porttiles y redacten un protocolo (una secuencia de instrucciones)
para armar la pila.
b) Hagan una lista de los materiales necesarios para armar la pila. Indiquen tambin en dnde pueden adquirirse esos
materiales (ferreteras, supermercados, etctera).
c) Identifiquen el nodo y el ctodo en la pila de limn.
d) Cmo verifica el protagonista del video que la pila funciona?
CEDIP Cuadernillo de actividades
30
Resistencia elctrica
Todos los materiales presentan una oposicin al flujo de los electrones o corriente elctrica, pero
unos obstruyen la circulacin ms que otros. Esto se debe a que en los tomos de algunos
materiales los electrones externos son cedidos con la relativa facilidad, disminuyendo la resistencia
al paso de los electrones.
Como sabemos, la corriente elctrica circula con relatividad facilidad en los
________________, por ello se utilizan en las construcciones de circuitos para conducir la
energa elctrica y se denominan _______________.
En cambio, existen otros materiales, como el ___________, _____________, __________,
____________, ______________, __________ y el _____________, que presentan gran
dificultad para permitir el paso de la corriente, por eso recibe el nombre de aislantes o
dielctricos.
Los alambres de conexin en los circuitos casi siempre estn protegidos con hule o algn
recubrimiento aislantes platicos a fin de evitar que la corriente pase de un alambre a otro al
ponerse accidentalmente en contacto.
La resistencia elctrica es la oposicin que presenta un
conductor al paso de la corriente o flujo de electrones.
A.- Electrones fluyendo por un buen conductor
elctrico, que ofrece baja resistencia.
B.- Electrones fluyendo por un mal conductor.
elctrico, que ofrece alta resistencia a su paso. En
ese caso los electrones chocan unos contra otros al
no poder circular libremente y, como consecuencia,
generan calor.
CEDIP Cuadernillo de actividades
31
Tipos de resistencias
Resistencias Descripcin Dibujo
Hilo bobinado
Fueron de los primeros tipos en fabricarse, y an se utilizan
cuando se requieren potencias algo elevadas de disipacin.
Estn constituidas por un hilo conductor bobinado en forma de
hlice o espiral (a modo de rosca de tornillo) sobre un sustrato
cermico.
Carbn prensado
Estas fueron tambin de las primeras en fabricarse en los
albores de la electrnica. Estn constituidas en su mayor
parte por grafito en polvo, el cual se prensa hasta formar un
tubo como el de la figura.
Pelcula de carbn
Este tipo es muy habitual hoy da, y es utilizado para valores
de hasta 2 watios. Se utiliza un tubo cermico como sustrato
sobre el que se deposita una pelcula de carbn tal como se
aprecia en la figura.
Pelcula de xido
metlico
Son muy similares a las de pelcula de carbn en cuanto a su
modo de fabricacin, pero son ms parecidas, elctricamente
hablando a las de pelcula metlica. Se hacen igual que las de
pelcula de carbn, pero sustituyendo el carbn por una fina
capa de xido metlico (estao o latn). Estas resistencias
son ms caras que las de pelcula metlica, y no son muy
habituales. Se utilizan en aplicaciones militares (muy
exigentes) o donde se requiera gran fiabilidad, porque la capa
de xido es muy resistente a daos mecnicos y a la
corrosin en ambientes hmedos.
Resistencias de
metal vidriado
Son similares a las de pelcula metlica, pero sustituyendo la
pelcula metlica por otra compuesta por vidrio con polvo
metlico. Como principal caracterstica cabe destacar su
mejor comportamiento ante sobrecargas de corriente, que
puede soportar mejor por su inercia trmica que le confiere el
vidrio que contiene su composicin. Como contrapartida, tiene
un coeficiente trmico peor, del orden de 150 a 250 ppm/C.
Se dispone de potencias de hasta 3 watios.
Se dispone de estas resistencias encapsuladas en chips tipo
DIL (dual in line) o SIL (single in line).
CEDIP Cuadernillo de actividades
32
Ley de Ohm
George Simn Ohm (1827) fsico y profesor alemn, enuncio la siguiente ley que lleva su
nombre:
La intensidad de la corriente elctrica que pasa por un conductor
es un circuito es directamente proporcional a la diferencia de
potencial aplicado a sus extremos e inversamente proporcional a
la resistencia del conductor.
Donde: V = diferencia de potencial aplicada a los extremos del conductor en volts (V)
R = resistencia del conductor en Ohms ()
I = intensidad de la corriente que circula por el conductor en amperes (A)
Resolver correctamente los siguientes problemas:
1. Determinar la intensidad de la corriente elctrica a travs de una resistencia de 30 al
aplicarle una diferencia de potencial de 90V.
2. Un tostador elctrico tiene una resistencia de 15 cuando est caliente. Cul ser la
intensidad de la corriente que fluir al conectarlo a una lnea de 120V?
3. Un alambre conductor deja pasar 6 A al aplicarle una diferencia de 110 V. Cul es el valor
de su resistencia?
4. Calcular la diferencia de potencial aplicada a una resistencia de 10 , si por ella fluyen 5 A.
5. Calcular la intensidad de la corriente que pasara por una resistencia de 20 al conectarse a
un acumulador de 12 V.
6. Determinar la resistencia de filamento de una lmpara que deja pasar 0.6 A de intensidad de
corriente al ser conectado a una diferencia de potencial de 120V.
7. Por una resistencia de 10 circula una corriente de 2 A. Cul es el valor de la diferencia
de potencial a la que estn conectados sus extremos?.
8. Calcular la resistencia de un conductor que al conectarse a una diferencia de potencial de
12 V deja pasar una corriente de 90 A.
R
V
I
CEDIP Cuadernillo de actividades
33
V
I
R
Un circuito elctrico es un sistema en el cual la corriente fluye por un conductor en una trayectoria
completa debido a una diferencia de potencial.
1. Voltaje
2. Corriente
3. Resistencia
Para representar en el papel los circuitos elctricos se utilizan una serie de smbolos que simplifican
mucho el trabajo. De esta forma cualquier persona puede entender y reproducir un circuito si
entiende los smbolos.
Representa grficamente los siguientes circuitos.
CEDIP Cuadernillo de actividades
34
Circuito serie
Un circuito en serie es aqul en que los dispositivos o elementos del circuito estn dispuestos de tal
manera que la totalidad de la corriente pasa a travs de cada elemento sin divisin ni derivacin.
Cuando en un circuito hay dos o ms resistencias en serie, la resistencia total se calcula sumando
los valores de dichas resistencias. Si las resistencias estn en serie, el valor total de la resistencia
del circuito se obtiene mediante la frmula:
Re = R1 + R2 + R3 +Rn
Donde Re: resistencia equivalente. ()
R1 + R2 + R3 +Rn. Suma del valor de cada una de las resistencias conectadas
en serie, es decir, 1, 2, 3 hasta n nmeros de ellas. ()
Circuito en paralelo
En un circuito en paralelo los dispositivos elctricos, por ejemplo las lmparas
incandescentes o las celdas de una batera, estn dispuestos de manera que todos los polos,
electrodos y terminales positivos (+) se unen en un nico conductor, y todos los negativos (-) en otro,
de forma que cada unidad se encuentra, en realidad, en una derivacin paralela. El valor de dos
resistencias iguales en paralelo es igual a la mitad del valor de las resistencias componentes y, en
cada caso, el valor de las resistencias en paralelo es menor que el valor de la ms pequea de cada
una de las resistencias implicadas. Si las resistencias estn en paralelo, el valor total de la
resistencia del circuito se obtiene mediante la frmula:
n 3 2 1 e
R
1
........
R
1
R
1
R
1
R
1
Donde:
Re: Resistencia equivalente ()
R1 + R2 + R3.. +Rn resistencias individuales ()
CEDIP Cuadernillo de actividades
35
Resolver correctamente los siguientes problemas:
1. Calcular la resistencia equivalente de tres resistencias cuyos valores son R1= 2 , R2 = 5 ,
R3 = 7 conectadas primero en a) serie y b) paralelo.
2. Calcular el valor de la resistencia que se debe conectar en paralelo con una resistencia de
10 para que la resistencia equivalente del circuito se reduzca a 6 .
3. Calcular la resistencia equivalente de cuatro resistencias cuyos valores son: R1= 10, R2 =
20 , R3 = 25 , conectadas en: a) serie y b) paralelo. Dibujar el diagrama para cada caso.
4. Determinar el valor de la resistencia equivalente de dos resistencias cuyos valores son: R1=
15 , R2 = 23, conectadas primero en serie y luego en paralelo.
5. Determinar la resistencia equivalente de cuatro resistencias, cuyos valores son: R1= 3 , R2
= 1, R3 = 4 y R4 = 2 , conectadas primero en serie y luego en paralelo. Dibuje el
diagrama que represente la conexin en cada caso.
CEDIP Cuadernillo de actividades
36
Comprobacin de resistencia
Para realizar la comprobacin del estado de una resistencia, se necesita tener la
herramienta fundamental para la electrnica. El Multmetro.
Para medir su valor y
comprobar si est bien o no,
tendremos que fijarnos en el cdigo
de colores de la resistencia para
averiguar su valor, y compararlo con
la lectura del multmetro.
Para ello, seleccionaremos la escala
apropiada, de acuerdo al valor de la
resistencia.
La convencin para el cdigo de colores es la siguiente:
Variacin de la resistencia con el
tiempo y la temperatura:
Toda resistencia tiene un coeficiente
de variacin por envejecimiento, y tambin
por variacin trmica.
Las resistencias de carbn son las
menos estables, ya que tienen una variacin
importante en los dos sentidos.
Las resistencias de metal film son
mucho ms estables que estas ltimas.
Las resistencias de alambre tambin son
estables.
CEDIP Cuadernillo de actividades
37
Las resistencias de carbn tienen un coeficiente de corrimiento por temperatura de (6/10000)
x C negativo promedio, mientras que las de metal film poseen un corrimiento de (5/100000) x C
positivo promedio.
Asociando en serie una resistencia de carbn y una de metal film, se puede obtener una
resistencia de corrimiento trmico nulo.
Rt = R carbn + R mf
R carbn = Rt / 13
Rmf = Rt R carbn
Resolver correctamente los siguientes problemas:
a. Se tienen asociadas en serie cuatro resistencias: 100 ohms, 220 ohms, 1,5 Kohms y 2,2 K ohms,
con una tensin de 56 volts y una corriente de 0,08 amperes (80 miliamperes). Calcular la
resistencia serie equivalente, la cada de tensin total y la individual para cada resistencia.
b. Se tienen asociadas en serie tres resistencias: 270 ohms, 4,7 Kohms y 15 ohms, con una tensin
de 15 voltios y una corriente de 0,05 amperes (50 miliamperes). Calcular las cadas de tensin
individuales para cada resistencia, la potencia disipada por cada una de ellas y la suma de las
mismas.
c. Se tienen asociadas en paralelo dos resistencias: 180 ohms y 220 ohms, con una corriente de 0,1
ampere (100 miliamperes). Calcular la resistencia paralelo equivalente y la corriente circulante por
cada rama del paralelo.
d. Se tienen asociadas en paralelo tres resistencias: 1 Kohm, 2,2 Kohms y 2,2 Mohms, con una
tensin de 60 volts.
e. Calcular la resistencia paralelo equivalente, la corriente por cada rama del paralelo y la cada de
tensin total del circuito.
CEDIP Cuadernillo de actividades
38
Prctica 1: Experimentos con lneas de lpiz
Aprovechando que los componentes de la mina de los lpices contienen grafito (mientras
ms blanda sea la mina, mejores resultados obtenemos, pues las resistencias a medir sern
menores, aconsejo utilizar un lpiz con mina 2B), que es conductor de la electricidad,
utilizamos una hoja de papel con lneas dibujadas de igual largo y distintos anchos
(podemos hacer 5 lneas de 15 cm de largo, con grosores de 2 cm, 1 cm, 0'5 cm, 0'2 cm y
0'1 cm) con el fin de demostrar la relacin de la longitud y el rea de un conductor elctrico
con su resistencia, sealamos sobre la hoja y en forma perpendicular a las lneas dibujadas,
marcas equidistantes de 1 cm (las marcas las numeramos de 0 a 15), para poder variar la
longitud de cada una de las lneas, que en este caso representan los conductores elctricos.
Aconsejo fijar la hoja sobre la mesa con una cinta adhesiva.
Para medir la resistencia elctrica de las lneas, utilizamos un tster en su funcin de
hmetro, y registramos las diferentes mediciones de resistencia, a medida que
aumentbamos la longitud de nuestro conductor. Es decir, colocamos una de las puntas del
tster en uno de los extremos de la lnea (la que hemos marcado como 0), y la otra punta a
una distancia de 1 cm, luego a los 2 cm, y as hasta llegar hasta el otro extremo de la lnea.
Recomendamos presionar con fuerza (evitando romper el papel) las puntas del tster para
estabilizar la lectura de los datos.
CEDIP Cuadernillo de actividades
39
Capacitores
El capacitor es un componente que, como
su nombre lo indica, almacena energa durante un
tiempo, tericamente infinito, pero que en la realidad
depende de la RSE (resistencia serie equivalente),
un tipo de resistencia de prdida que presenta todo
capacitor.
El capacitor se comporta como un circuito abierto
para la corriente continua, pero en alterna su
reactancia disminuye a medida que aumenta la frecuencia.
Hay capacitores de varios tipos
Tipos Descripcin Dibujo Usos
Cermicos
Son condensadores muy baratos, pero tienen
la desventaja de ser muy variables con el
tiempo y la temperatura. Adems, su
capacidad es baja en relacin con su tamao.
Polister
Son condensadores muy grandes en funcin
de su capacidad, pero son muy estables con
el tiempo y la temperatura. Permiten obtener
aislaciones muy altas (comercialmente los
hay hasta de 630 volts).
Electrolticos
Son capacitores que logran grandes
capacidades en tamaos reducidos. Esto se
debe a que presenta una construccin con
una sustancia qumica como dielctrico, en
vez de polister o cermica como los
anteriores.
Tantalio
Es parecido al anterior en el hecho de que
permite obtener altas capacidades en
pequeos tamaos, pero son ms estables
que los anteriores con respecto a la
temperatura y el transcurso del tiempo.
Tambin presentan polaridad.
CEDIP Cuadernillo de actividades
40
Asociacin serie paralelo (capacitores)
Al igual que las resistencias, se pueden formar combinaciones en serie o en paralelo de
capacitores. La diferencia radica en que el valor resultante es totalmente al inverso de las
resistencias.
a) Asociacin serie. En este tipo, los capacitores son colocados uno a continuacin del otro. La
capacidad total es la siguiente:
n 3 2 1 e
C
1
.........
C
1
C
1
C
1
C
1
b) Asociacin paralelo. En este tipo, los capacitores son colocados todos
juntos, uniendo sus extremos. La capacidad total es el siguiente
n 3 2 1 e
C ......... C C C C
Es importante sealar lo siguiente: Al conectar los capacitores en
paralelo, cada uno de ellos tendr la misma diferencia de potencial V equivalente a
C
Q
V y,
adems, el valor de la carga total almacenada ser igual a:
n 3 2 1
Q ......... Q Q Q Q
En una conexin en serie los capacitores adquieren la misma carga CV Q y el valor de la
diferencia de potencial total ser igual a :
n 3 2 1
V ......... V V V V
Resolver correctamente los siguientes problemas:
1. Tres capacitares de 3, 6 y 8 pF se conectan primero en serie y luego en paralelo. Calcular la
capacitancia equivalente en cada caso.
2. Tres capacitores de 2,7 y 12 pF se conectan en serie a una batera de 30 V. Calcular la
capacitancia equivalente de la combinacin.
3. Dos capacitores de 7 y 9 pF se conectan primero en serie despus en paralelo. Calcule la
capacitancia equivalente en cada caso.
CEDIP Cuadernillo de actividades
41
Bobinas, diodos y transistores
A completa las siguientes oraciones
1. La ______________ es un arrollado de
alambre de cobre sobre un ncleo, que puede ser de
aire (sin ncleo), de ferrite, hierro, silicio, etc.
2. Con la ___________ ________________funciona
como un conductor, oponiendo una resistencia que
depende de la resistencia total del _______________
bobinado.
3. En la ____________ ______________, en cambio, tiene la propiedad de aumentar su
___________ a medida que aumenta la frecuencia. Es a la inversa del
_________________.
4. Combinado con el _____________ se pueden obtener circuitos resonantes, en los cuales la
resonancia se produce cuando coinciden las frecuencias de corte de ambos elementos.
Las bobinas ms comunes son las detalladas a continuacin.
Nombre Descripcin Dibujo
Este tipo est hecho con un bobinado de alambre de cobre
sobre un soporte de hierro dulce. Este tipo de bobinas solo son
apropiadas para aplicaciones de electroimn, donde la corriente
a travs del bobinado induce un efecto de imantacin temporal
sobre el hierro.
La bobina esta arrollada en el aire, o sea, que no lleva ncleo.
La inductancia de este tipo de bobinas es muy baja, pero tiene
la ventaja de que son muy apropiadas para trabajar en altas
frecuencias.
Este material est hecho con hierro, carbono y otros metales,
produciendo una barra a partir de un granulado muy fino de
estos elementos. Se utilizan mucho en receptores de radio. Este
ncleo permite aumentar la inductancia de la bobina, y son
apropiados para altas frecuencias.
Este ncleo est compuesto por delgadas chapas de silicio, que
se entrelazan formando un ncleo compacto. Permite manejar
elevadas potencias, y disminuye las prdidas y el calentamiento.
CEDIP Cuadernillo de actividades
42
Una aplicacin tpica de las bobinas es el
transformador. Es un dispositivo que consta bsicamente de
un bobinado primario, al cual se le aplica una tensin alterna,
y uno secundario, del cual se extrae otra tensin mediante la
induccin. magntica del ncleo. Esta tensin depende de la
relacin de espiras entre los bobinados.
CEDIP Cuadernillo de actividades
43
Diodos
Los diodos son dispositivos semiconductores de estado slido,
generalmente fabricados con silicio, al que se le agregan impurezas para lograr
sus caractersticas.
Poseen dos terminales, llamados nodo y ctodo.
Bsicamente un diodo se utiliza para rectificar la corriente elctrica. Su caracterstica
principal es que permite la circulacin de corriente en un solo sentido.
Por su construccin, el diodo de silicio posee en polarizacin directa (circulacin de corriente
de nodo hacia ctodo) una cada de tensin del orden de los 0,6 a 0,7 voltios, y en inversa
(bloqueo) tiene una corriente de fuga prcticamente despreciable.
Diodo Descripcin Dibujo Simbologa
De uso
general
Zener
Schottky
Seal
LED
Potencia
CEDIP Cuadernillo de actividades
44
Transistores
Los transistores son dispositivos semiconductores de estado
slido, generalmente fabricados con los transistores, tienen distintas
denominaciones, en base a su tipo de construccin. Vamos a
ocuparnos de los ms comunes.
El transistor es un elemento de tres terminales, que tiene la
propiedad de variar la corriente que circula a travs de el mediante
una polarizacin muy pequea. Es decir, se pueden manejar grandes corrientes mediante la
inyeccin apropiada de una corriente de control muy pequea. Este es el principio por el cual los
transistores son muy utilizados como elementos amplificadores de potencia.
Tipos de transistores
Bipolar: Es uno de los transistores ms utilizados. Consta de tres bloques de material
semiconductor, que se pueden disponer en configuracin NPN o PNP, y de tres terminales, Base,
Colector y Emisor.
Las denominaciones NPN y PNP corresponden al tipo de material con el que estn dopados los
bloques de silicio. Estos bloques en realidad son uno solo, el secreto es que al agregarle impurezas
en lugares precisos, se producen zonas dentro del bloque, delimitadas por junturas. Esto permite
que tenga propiedades semiconductoras.
Aplicando la polarizacin apropiada a la base del transistor, se logra variar su ganancia,
produciendo una amplificacin de la seal aplicada a la base. La circulacin de corriente en un tipo
de estos transistores se produce en direccin opuesta al del otro tipo, y las polarizaciones son de
polaridad opuesta.
Hay transistores bipolares de muchos tipos y potencias.
a) Unipolar: tambin llamado "Efecto de campo" (FET por sus siglas en Ingles), permite
controlar el paso de la corriente elctrica mediante un campo elctrico. Mediante la
aplicacin de una polarizacin inversa a la compuerta, se produce un "estrechamiento" de la
misma, lo que reduce la cantidad de electrones circulantes.
b) Existen FET tipo N y tipo P, dependiendo de la disposicin de las zonas dopadas.
c) MOSFET: Este tipo de FET posee una compuesta aislada, lo que genera una resistencia de
entrada extremadamente elevada. Existen dos tipos, de canal N y canal P. A su vez, existen
los de "enriquecimiento" y los de "empobrecimiento", dependiendo de su construccin
interna. Requieren muy poca corriente de compuerta para funcionar, y son sumamente
eficientes.
Antes de comprobar los transistores, se debe consultar en un manual de componentes su
configuracin de patas, ya que hay varias combinaciones existentes.
CEDIP Cuadernillo de actividades
45
Para medir un transistor FET tipo N, de proceder de la siguiente manera:
a. Se conecta la punta positiva a la compuerta
b. Se conecta la punta negativa al drenaje o a la fuente.
c. En cualquiera de los dos casos, la lectura en directa debe medir una resistencia de
aproximadamente 1Kohm, y la inversa debe ser casi infinita.
Si alguna de estas lecturas no es la correcta, el FET se encuentra defectuoso.
Para los FET de tipo P, el procedimiento se realiza con las puntas a la inversa.
Para medir un MOSFET, la resistencia entre la compuerta y cualquiera de los otros dos terminales
debe ser casi infinita.
Una resistencia baja indicara una falla en la aislacin de la compuerta, por lo que el transistor debe
ser reemplazado.
Entre los terminales de drenaje y fuente, deber mostrar un valor de resistencia intermedio.
Realiza un diagrama de flujo sobre el tema de Transistores, con dibujo que los represente.
CEDIP Cuadernillo de actividades
46
Circuito integra 555
Un circuito integrado, como su nombre lo indica, es un
conjunto de componentes concentrados dentro de una sola pastilla
de material semiconductor.
Se presentan en encapsulados plsticos con terminales
en forma de patas de araa, que salen por el costado del
encapsulado.
Dependiendo del tipo de encapsulado, se los conocen como:
SIP (Single In-line Package = Encapsulado en hilera simple), o
DIP (Dual In-line Package = Encapsulado en hilera doble).
Su variedad es enorme, encontrando desde preamplificadores de audio, hasta procesadores
de TV completos.
El nivel de integracin desde su creacin ha sido sorprendente, llegando a su mxima
expresin con los procesadores para computadoras, donde cientos de millones de transistores son
integrados dentro de una diminuta pastilla de material semiconductor.
Recientemente, se alcanz la barrera de la integracin. Los fabricantes llegaron a un punto
que no pudieron comprimir ms los transistores para aumentar las prestaciones de los
procesadores. Por eso, ahora comenz una nueva era en la historia de los procesadores: los "doble
ncleo", dos procesadores totalmente independientes dentro de una sola pastilla.
Descripcin de las terminales del temporizador 555
GND (normalmente la 1): es el polo negativo de la alimentacin, generalmente "tierra masa".
Disparo (normalmente la 2): Es en esta patilla, donde se establece el inicio del tiempo de
retardo, si el 555 es configurado como monoestable. Este proceso de disparo ocurre cuando
este pin va por debajo del nivel de 1/3 del voltaje de alimentacin. Este pulso debe ser de corta
duracin, pues si se mantiene bajo por mucho tiempo la salida se quedar en alto hasta que la
entrada de disparo pase a alto otra vez.
Salida (normalmente la 3): Aqu veremos el resultado de la operacin del temporizador, ya sea
que est conectado como monoestable, astable u otro. Cuando la salida es alta, el voltaje ser
el voltaje de alimentacin (Vcc) menos 1.7 Voltios. Esta salida se puede obligar a estar en casi 0
voltios con la ayuda de la patilla de reset (normalmente la 4).
Reset (normalmente la 4): Si se pone a un nivel por debajo de 0.7 Voltios, pone la patilla de
salida a nivel bajo. Si por algn motivo esta patilla no se utiliza hay que conectarla a Vcc para
evitar que el 555 se "resetee".
CEDIP Cuadernillo de actividades
47
Control de voltaje (normalmente la 5): Cuando el temporizador se utiliza en el modo de
controlador de voltaje, el voltaje en esta patilla puede variar casi desde Vcc (en la prctica como
Vcc -1 voltio) hasta casi 0 V (aprox. 2 Voltios). As es posible modificar los tiempos en que la
salida esmultivibrador astable y como multivibrador monoestable. Puede tambin configurarse
para por ejemplo generar formas de onda tipo Rampa.
Umbral (normalmente la 6): Es una entrada a un comparador interno que se utiliza para poner la
salida (Pin # 3) a nivel bajo bajo
Descarga (normalmente la 7): Utilizado para descargar con efectividad el condensador externo
utilizado por el temporizador para su funcionamiento.
Voltaje de alimentacin (VCC) (normalmente la 8): es el pin donde se conecta el voltaje de
alimentacin que va de 4.5 voltios hasta 16 voltios (mximo).
CEDIP Cuadernillo de actividades
48
Practica 1
El Circuito Integrado utilizado en esta prctica es el LM 555, de 8 pines en un modo
de operacin ASTABLE o reloj. La frecuencia del flash, depende de la posicin del potencimetro o
resistencia variable de 100 Kilohmios , as como tambin del condensador de 22 microfaradios. El
led rojo indica el nivel BAJO del tren de pulsos y el verde indica el nivel ALTO, Como los Led's no
destellan al mismo tiempo, se produce un efecto visual de FLASH.
Componentes necesarios
Un Circuito Integrado LM 555
Un Potencimetro de 100 Kilohomios
Una resistencia de 6.8 Kilohomios
Una resistencia de 1 Kilohomios
Dos resistencias de 220 Ohmios
Dos LEDS, uno rojo y uno verde.
Un Condensador de 22 microfaradios a 50 V.
Una pila de 9 voltios
Alambres de conexin
Protoboard.
Conexiones para el montaje
El circuito integrado LM 555 se alimenta con el positivo, alambre color rojo al pin N 8, y el
negativo al pin N 1,alambre color negro. Entre positivo y elpin N 7,coloque la resistencia de 6.7 K.
De este pin tambin coloque la resistencia de 1K y un extremo del potencimetro, del centro del
potencimetro alambre azul al pin N
6. Aqu tambin ubique un puente hasta el pin N
2. Coloque el condensador de 22 uF. entre el pin
N2 y negativo en el protoboard. Del pin N 3,
alambre naranja conecte los extremos de las
resistencias de 220 Ohmios, en una de ellas
al ctodo del LED rojo y el nodo a positivo. la
segunda al nodo del LED verde y el ctodo al
negativo del protoboard.
CEDIP Cuadernillo de actividades
49
Practica 2
Control de velocidad de un motor con el 555
Para controlar la velocidad de un motor entre un 5% hasta 95% de su marcha plena y no perder
potencia se debe usar anchos de pulsos variables a voltaje constante, con esto no se pierde el
torque del motor.
En este caso podemos usar el timer 555 en su forma estable controlando la carga y descarga de su
condensador de temporizacin, esto lo conseguimos aislando los caminos de alimentacin mediante
diodos como se muestra en la figura:
Con el potencimetro de 5k controlamos la velocidad el transistor bd679 es un par darlington
en un solo envase y no es crtico el reemplazarlo solo verificar que en colector pueda manejar la
corriente que nos pide el motor, tambin se puede hacer una conexin darlington con un par de
transistores deferentes siendo el de salida el que maneje la corriente de motor.
El diodo en inversa se usa para encerrar los transitorios de desconexin de una carga inductiva
como el motor y siempre debe estar presente antes de probar el circuito.
Tambin es bueno desacoplar la fuente poniendo un condensador electroltico de unos 220 uF entre
+ y - de la alimentacin y muy cerca al integrado.
CEDIP Cuadernillo de actividades
50
Proyecto. Timer con salida de relay
El circuito es simple, para los que hacemos Electrnica es el muy conocido timer 555 en su
configuracin monostable o temporizador, el tiempo en el cual el timer tiene una salida alta viene
dado por la relacin de los componentes R y C en ohmios y faradios segn la frmula T = 1.1 RC ,
con 100 uF como est indicado en el diagrama el tiempo es 1.1 seg y de alli se obtienen mltiplos.
La salida mediante el transistor inversor abre o cierra un relay , en su caso abrir o cerrar otros
relays, pero este circuito puede tambin usarse para conectar una sirena, una licuadora, un bombillo
elctrico por ejemplo para alumbrar la subida de una escalera o un pasaje oscuro, luego de cumplido
el tiempo el artefacto controlado se desconectar solo. El circuito es el siguiente:
Potrebbero piacerti anche
- Diagrama de Flujo SoporteDocumento3 pagineDiagrama de Flujo Soporteziriusnake0% (1)
- Plan de Estudios 2011. Educación BásicaDocumento93 paginePlan de Estudios 2011. Educación BásicaRigoberto Vicente Castro100% (15)
- Sensor DHT11 y RelevadorDocumento9 pagineSensor DHT11 y Relevadorjoselo18000Nessuna valutazione finora
- Satélite Enlatado o CanSatDocumento5 pagineSatélite Enlatado o CanSatjoselo18000Nessuna valutazione finora
- Cómo Funciona Un Coche EléctricoDocumento14 pagineCómo Funciona Un Coche Eléctricojoselo18000Nessuna valutazione finora
- CD 4017Documento4 pagineCD 4017joselo18000Nessuna valutazione finora
- Secuencia de 3 Año 1 BloqueDocumento4 pagineSecuencia de 3 Año 1 Bloquejoselo18000Nessuna valutazione finora
- Temporizador 555Documento6 pagineTemporizador 555joselo18000Nessuna valutazione finora
- Secuencia de 2 Año 5 BloqueDocumento3 pagineSecuencia de 2 Año 5 Bloquejoselo18000Nessuna valutazione finora
- Secuencia de 1 Año 3 BloqueDocumento6 pagineSecuencia de 1 Año 3 Bloquejoselo18000Nessuna valutazione finora
- Secuencia de 2 Año 4 BloqueDocumento7 pagineSecuencia de 2 Año 4 Bloquejoselo18000Nessuna valutazione finora
- Secuencia de 2 Año 1 BloqueDocumento4 pagineSecuencia de 2 Año 1 Bloquejoselo18000Nessuna valutazione finora
- Secuencia de 1 Año 5 BloqueDocumento5 pagineSecuencia de 1 Año 5 Bloquejoselo18000Nessuna valutazione finora
- Secuencia de 2 Año 2 BloqueDocumento6 pagineSecuencia de 2 Año 2 Bloquejoselo18000Nessuna valutazione finora
- Secuencia de 2 Año 3 BloqueDocumento5 pagineSecuencia de 2 Año 3 Bloquejoselo18000Nessuna valutazione finora
- Secuencia de 1 Año 4 BloqueDocumento5 pagineSecuencia de 1 Año 4 Bloquejoselo18000Nessuna valutazione finora
- Secuencia de 1 Año 1 BloqueDocumento4 pagineSecuencia de 1 Año 1 Bloquejoselo18000Nessuna valutazione finora
- Secuencia de 1 Año 2 BloqueDocumento6 pagineSecuencia de 1 Año 2 Bloquejoselo18000Nessuna valutazione finora
- Cuadernillo de SegundoDocumento20 pagineCuadernillo de Segundojoselo18000Nessuna valutazione finora
- Tecnologia InformaticaDocumento98 pagineTecnologia Informaticaguda3719Nessuna valutazione finora
- TemasquimicaDocumento45 pagineTemasquimicajoselo18000Nessuna valutazione finora
- Cuadernillo de PrimeroDocumento19 pagineCuadernillo de Primerojoselo18000Nessuna valutazione finora
- Cuadernillo de TerceroDocumento19 pagineCuadernillo de Tercerojoselo18000Nessuna valutazione finora
- TEMA I Inter PerfilesDocumento51 pagineTEMA I Inter PerfilesTatiana Moreno SuescúnNessuna valutazione finora
- Visual Basic 6 (Curso Paso A Paso)Documento105 pagineVisual Basic 6 (Curso Paso A Paso)anon-38824297% (68)
- OrientacionDocumento105 pagineOrientacionjoselo18000Nessuna valutazione finora
- Socioeconomic ADocumento168 pagineSocioeconomic Ajoselo18000Nessuna valutazione finora
- Relaciones HumanasDocumento39 pagineRelaciones HumanasManuel Lara ArgaezNessuna valutazione finora
- Quimica 1Documento128 pagineQuimica 1joselo18000Nessuna valutazione finora
- Primeros AuxiliosDocumento118 paginePrimeros Auxiliosjoselo18000Nessuna valutazione finora
- Estructuras de PseudocódigosDocumento2 pagineEstructuras de PseudocódigosKhrys De La VegaNessuna valutazione finora
- Venta de Zapatillas AdidasDocumento3 pagineVenta de Zapatillas Adidasmarlon salvaNessuna valutazione finora
- Combinaciones Quinielas PDFDocumento2 pagineCombinaciones Quinielas PDFNatashaNessuna valutazione finora
- Resumen Metodos EdoDocumento3 pagineResumen Metodos EdolpisitelloNessuna valutazione finora
- Victoria AiharDocumento2 pagineVictoria AiharLute CastroNessuna valutazione finora
- Gramaticas de Libre Contexto Heder Julio SalgadoDocumento4 pagineGramaticas de Libre Contexto Heder Julio SalgadohederjuliosalgadoNessuna valutazione finora
- Linux Vs WindowsDocumento23 pagineLinux Vs WindowsRob Rubio Castillo100% (1)
- Funciones Estándar y Funciones de Sistema para S7-300 y S7-400Documento742 pagineFunciones Estándar y Funciones de Sistema para S7-300 y S7-400Kmilo Eduardo100% (1)
- 3-2-Inv - Op - Metodo Simplex PDFDocumento64 pagine3-2-Inv - Op - Metodo Simplex PDFSusan Li HBNessuna valutazione finora
- 20190819093914horario 2019 IiDocumento81 pagine20190819093914horario 2019 Iimsoto20052576Nessuna valutazione finora
- F-Af-039 r00 Reporte Semanal de FallasDocumento2 pagineF-Af-039 r00 Reporte Semanal de FallasLuis AlbertoNessuna valutazione finora
- CTS MAYO 2022 - OCTUBRE 2022 IntermediacionesDocumento2 pagineCTS MAYO 2022 - OCTUBRE 2022 Intermediacionesestudio contable tributario D&MNessuna valutazione finora
- Manual Google Sites PDFDocumento38 pagineManual Google Sites PDFAntonio BernalNessuna valutazione finora
- Iso/iec 17799Documento24 pagineIso/iec 17799MesberiLopezNessuna valutazione finora
- Caso Empresa Pilos S.A.Documento9 pagineCaso Empresa Pilos S.A.Catalina Pardo LippeltNessuna valutazione finora
- LCD 2x16Documento6 pagineLCD 2x16api-27535945100% (3)
- Implementacion de Telefonía VOIP e Implementacion de ISO27001Documento17 pagineImplementacion de Telefonía VOIP e Implementacion de ISO27001AndrésLeónNessuna valutazione finora
- Funciones de Distribucion de Probabilidad ContinuaDocumento3 pagineFunciones de Distribucion de Probabilidad ContinuaAlonsoNessuna valutazione finora
- 01 Lista de Chequeo Portafolio Instructor - COMPLEMENTARIADocumento1 pagina01 Lista de Chequeo Portafolio Instructor - COMPLEMENTARIAMarioCaraballoNessuna valutazione finora
- Cómo Transmitir Instrucciones Con EficaciaDocumento2 pagineCómo Transmitir Instrucciones Con EficaciaLauraLMeseguerNessuna valutazione finora
- Sistema Tradicional de ArchivosDocumento2 pagineSistema Tradicional de ArchivosAngelo Chuquilla50% (2)
- Actividad 2.2 Análisis Comparativo. Clasificación de Comp. y GeneracionesDocumento2 pagineActividad 2.2 Análisis Comparativo. Clasificación de Comp. y Generacionesanneryreynoso80Nessuna valutazione finora
- Suite Home 3d Guia de UsuarioDocumento16 pagineSuite Home 3d Guia de UsuarioAntonio RealNessuna valutazione finora
- 1 FilosofiaDocumento19 pagine1 FilosofiamanualesibarguenNessuna valutazione finora
- C010 - Instructivo para La Verificacion y Control de Termometros y Termografos R08Documento3 pagineC010 - Instructivo para La Verificacion y Control de Termometros y Termografos R08Juan Pablo EspinosaNessuna valutazione finora
- Crear y Autorizar Un Servidor DHCPDocumento2 pagineCrear y Autorizar Un Servidor DHCPsalberNessuna valutazione finora
- Diagrama de FlujoDocumento2 pagineDiagrama de FlujoNestor Hernan Rojas GomezNessuna valutazione finora
- Manual de Correo Institucional Universidad MontrerDocumento16 pagineManual de Correo Institucional Universidad MontrerComunidad Montrer0% (2)
- Perforación Con Presión ControladaDocumento2 paginePerforación Con Presión ControladaLuis LopezNessuna valutazione finora