Potrebbero piacerti anche
- AnalisisDocumento13 pagineAnalisisgiovannihurtadoNessuna valutazione finora
- Apuntes de Clase de ProductividadDocumento11 pagineApuntes de Clase de ProductividadgiovannihurtadoNessuna valutazione finora
- Rueda de PoliamidaDocumento1 paginaRueda de PoliamidagiovannihurtadoNessuna valutazione finora
- Convergencia o Divergencia de Las Series Geometricas 1Documento8 pagineConvergencia o Divergencia de Las Series Geometricas 1giovannihurtadoNessuna valutazione finora
- TESIS-armónicos en Rectificadores-Perú-2017 PDFDocumento194 pagineTESIS-armónicos en Rectificadores-Perú-2017 PDFCarlos Redondo BenitezNessuna valutazione finora
- Temas Parcial Teórico de Elementos de Máquinas IiDocumento2 pagineTemas Parcial Teórico de Elementos de Máquinas IigiovannihurtadoNessuna valutazione finora
- Apuntes de Clase Balanceo de LineaDocumento9 pagineApuntes de Clase Balanceo de LineagiovannihurtadoNessuna valutazione finora
- Acero 4140 Ø 1" Cuadrados de Acero Bronce Acero Ensamble: ResumenDocumento1 paginaAcero 4140 Ø 1" Cuadrados de Acero Bronce Acero Ensamble: ResumengiovannihurtadoNessuna valutazione finora
- Graneteado PDFDocumento11 pagineGraneteado PDFSeltromind SrlNessuna valutazione finora
- Cuestionario Ingeniería de Manufactura.Documento3 pagineCuestionario Ingeniería de Manufactura.giovannihurtadoNessuna valutazione finora
- Catalogo Portatroquel CgaDocumento6 pagineCatalogo Portatroquel CgaJose Leonardo CabrejoNessuna valutazione finora
- Herramientas MachuelosDocumento8 pagineHerramientas Machuelosmecanica2000Nessuna valutazione finora
- Estadistica en La Ingeniria MecanicaDocumento5 pagineEstadistica en La Ingeniria MecanicaRicardo LópezNessuna valutazione finora
- Evolucion de Los Sistemas de Seguridad Pasiva Confort y ComunicacionesDocumento50 pagineEvolucion de Los Sistemas de Seguridad Pasiva Confort y ComunicacionesMhej IadherNessuna valutazione finora
- Trigonometria en Triangulos Rectangulos y OblicuangulosDocumento1 paginaTrigonometria en Triangulos Rectangulos y OblicuangulosDaniel Ponce Martinez100% (1)
- Catalogo Portatroquel CgaDocumento6 pagineCatalogo Portatroquel CgaJose Leonardo CabrejoNessuna valutazione finora
- Graneteado PDFDocumento11 pagineGraneteado PDFSeltromind SrlNessuna valutazione finora
- Formulas Basicas de Integracion (Con Expresiones Trigonometricas)Documento2 pagineFormulas Basicas de Integracion (Con Expresiones Trigonometricas)Jherson Carlos BautistaNessuna valutazione finora
- Procesos TornoDocumento8 pagineProcesos TornoJonathan Bustamante VillarroelNessuna valutazione finora
- NTMD 0202 A1Documento24 pagineNTMD 0202 A1giovannihurtadoNessuna valutazione finora
- NTMD 0174 A4 - PDFDocumento31 pagineNTMD 0174 A4 - PDFgiovannihurtadoNessuna valutazione finora
- Ecuaciones Cinematicas para Movimiento de ProyectilesDocumento1 paginaEcuaciones Cinematicas para Movimiento de ProyectilesDaniel Ponce MartinezNessuna valutazione finora
- NTMD 0174 A4 - PDFDocumento31 pagineNTMD 0174 A4 - PDFgiovannihurtadoNessuna valutazione finora
- NTMD 0202 A1Documento24 pagineNTMD 0202 A1giovannihurtadoNessuna valutazione finora
- Art 7Documento7 pagineArt 7giovannihurtadoNessuna valutazione finora
- NTMD 0174 A4 - PDFDocumento31 pagineNTMD 0174 A4 - PDFgiovannihurtadoNessuna valutazione finora
- Selection Guide PLASKBLAK TECHBLAK Black Masterbatches FRENCHDocumento8 pagineSelection Guide PLASKBLAK TECHBLAK Black Masterbatches FRENCHgiovannihurtadoNessuna valutazione finora
- 1 Fabricación - Paneles - A PDFDocumento58 pagine1 Fabricación - Paneles - A PDFLeopoldo RedaelliNessuna valutazione finora
- 19mf - Maquina - InyectoraDocumento3 pagine19mf - Maquina - InyectoraRaul Rodriguez GuizaNessuna valutazione finora
- MandrilesDocumento17 pagineMandrilesVicko VasquezzNessuna valutazione finora
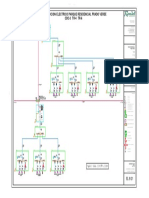
- El 9-21 Diagrama Unifilar CDC-3 PV - 10 Jun 2014Documento1 paginaEl 9-21 Diagrama Unifilar CDC-3 PV - 10 Jun 2014Gustavo Galvis NaviaNessuna valutazione finora
- HinostrozaDiaz TesisMaestriaPDFADocumento103 pagineHinostrozaDiaz TesisMaestriaPDFAhazael villaNessuna valutazione finora
- CUADERNO DE INFORMES 4 EntregarDocumento7 pagineCUADERNO DE INFORMES 4 Entregarjorge luisNessuna valutazione finora
- BobinasDocumento4 pagineBobinasHector Andres CorreaNessuna valutazione finora
- CatalogoDocumento47 pagineCatalogopablo ignacio cancino molinaNessuna valutazione finora
- 7 - Compresores - Producción MusicalDocumento4 pagine7 - Compresores - Producción MusicalmateocabralNessuna valutazione finora
- Manual de Operaciones HVF658-660-664Documento216 pagineManual de Operaciones HVF658-660-664Dimas TorrealbaNessuna valutazione finora
- Sensores Ing Arentsen UTN FRHDocumento104 pagineSensores Ing Arentsen UTN FRHAgustin DiocaNessuna valutazione finora
- GuianNn2nIMEEInn 7564dd4413de856Documento30 pagineGuianNn2nIMEEInn 7564dd4413de856Luis ForeroNessuna valutazione finora
- Lab05 FuenteAlimentaciónReguladaCircuitosIntegrados (R)Documento9 pagineLab05 FuenteAlimentaciónReguladaCircuitosIntegrados (R)Joaquin SalazarNessuna valutazione finora
- Ponyelectronica - Amplificador de 12w y Fuente Simple Con Un Chip TDA2006 o Un X0040TADocumento12 paginePonyelectronica - Amplificador de 12w y Fuente Simple Con Un Chip TDA2006 o Un X0040TAElsy MirabNessuna valutazione finora
- Sistemas Digitales y Ensambladores - Parcial Escenario 4Documento21 pagineSistemas Digitales y Ensambladores - Parcial Escenario 4Daniela Sofía WilsonNessuna valutazione finora
- Transistor BJT Como ConmutadorDocumento3 pagineTransistor BJT Como ConmutadorPablo Enrique Pérez GómezNessuna valutazione finora
- Preguntas de RevisionDocumento19 paginePreguntas de RevisionLaura BabativaNessuna valutazione finora
- Guia de Practica 3 - Rectificador de Onda Completa Filtro Por CondensadorDocumento5 pagineGuia de Practica 3 - Rectificador de Onda Completa Filtro Por CondensadorRicardoNessuna valutazione finora
- Precios Fiesta Glow 2021Documento2 paginePrecios Fiesta Glow 2021ENDER CASTELLANOSNessuna valutazione finora
- Manual para Uso de Teams Events: Pincha AquíDocumento3 pagineManual para Uso de Teams Events: Pincha Aquíradamanthe82Nessuna valutazione finora
- Dispositivo Electronico Enmascarador de La VozDocumento4 pagineDispositivo Electronico Enmascarador de La VozCarlos Gutierrez RojasNessuna valutazione finora
- Catalogo Wings MobileDocumento21 pagineCatalogo Wings MobileSussan GutierrezNessuna valutazione finora
- 04 Sistemas SecuencialesDocumento26 pagine04 Sistemas SecuencialesJESUS GUILLERMO QUIÑONES TUPANessuna valutazione finora
- Tarea Virtua # 3Documento5 pagineTarea Virtua # 3Gin LindaoNessuna valutazione finora
- Libro SecuencialDocumento196 pagineLibro Secuencialseñor oscuroNessuna valutazione finora
- 1756 Controllogix Analog I/O Modules: Installation InstructionsDocumento8 pagine1756 Controllogix Analog I/O Modules: Installation InstructionsJulio Cesar Guiñez BozaNessuna valutazione finora
- Unidad 2 de MetrologiaDocumento24 pagineUnidad 2 de Metrologiaaldo_fuentes_6Nessuna valutazione finora
- Tension Riso en Un CapacitorDocumento5 pagineTension Riso en Un CapacitorManuel HurtadoNessuna valutazione finora
- Enunciado Caso Práctico - M5T2 - Subestaciones de Tracción - CEDocumento8 pagineEnunciado Caso Práctico - M5T2 - Subestaciones de Tracción - CELalo Cortes EspinosaNessuna valutazione finora
- Practica - 4 - Control de Velocidad de Un Motor Electrico - OKDocumento4 paginePractica - 4 - Control de Velocidad de Un Motor Electrico - OKcarlosNessuna valutazione finora
- Presentación Final InstrumemtacionDocumento23 paginePresentación Final InstrumemtacionNoé NKNessuna valutazione finora
- Acta de NacimientoDocumento1 paginaActa de NacimientoDavid Uriel Perez PerezNessuna valutazione finora
- Laboratorio 4Documento8 pagineLaboratorio 4CharlesNessuna valutazione finora