Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Cost-Benefit Analysis of Maintenance Measures For Power TransformersDocumento147 pagineCost-Benefit Analysis of Maintenance Measures For Power TransformersAlireza AzerilaNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Health IndexDocumento8 pagineHealth IndexAlireza AzerilaNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Tykeson Nyman Orig Enviromental and Geographical AspesctsDocumento7 pagineTykeson Nyman Orig Enviromental and Geographical AspesctsAlireza AzerilaNessuna valutazione finora
- GMSHDocumento278 pagineGMSHAlireza AzerilaNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Fortran RTTRRDocumento2 pagineFortran RTTRRAlireza AzerilaNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Performance of HVDC Electrode in Soil Structures: Ground VariousDocumento7 paginePerformance of HVDC Electrode in Soil Structures: Ground VariousAlireza AzerilaNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Malik Quran TransaltionDocumento285 pagineMalik Quran TransaltionAlireza AzerilaNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Current Transformer Application GuideDocumento50 pagineCurrent Transformer Application Guidesbhatta7392% (12)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Statistical Process Control & Cost of QualityDocumento114 pagineStatistical Process Control & Cost of QualityAshraf S. Youssef100% (2)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
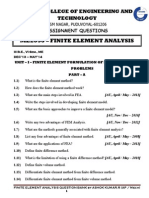
- Assignment Booklet Me2353 Finite Element Analysis Dec 2013 May 2014Documento85 pagineAssignment Booklet Me2353 Finite Element Analysis Dec 2013 May 2014Ashok Kumar Rajendran100% (9)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Comb - Chemkin - Format PDFDocumento5 pagineComb - Chemkin - Format PDFMUHAMMAD FAREEZ IZWAN BIN ABDUL JALILNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- DST FingerprintDocumento10 pagineDST FingerprintAli DMNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Const Estimate Made EasyDocumento31 pagineConst Estimate Made EasyLorenzo SerranoNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Heydar Aliyev Cultural Centre: StructureDocumento3 pagineHeydar Aliyev Cultural Centre: Structurenusha rakheNessuna valutazione finora
- A N Engineering Report On Unit 8: Engineering Design, Assignment 2 - Use of Computer Based Technology in Engineering DesignDocumento14 pagineA N Engineering Report On Unit 8: Engineering Design, Assignment 2 - Use of Computer Based Technology in Engineering DesignTop Engineering SolutionsNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Commercial Office Space - Cyber CityDocumento8 pagineCommercial Office Space - Cyber CityankurNessuna valutazione finora
- Delphi Client ServerDocumento9 pagineDelphi Client Serverlukgv,hNessuna valutazione finora
- Lesco TestDocumento8 pagineLesco Testai khanNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Secondary Storage DevicesDocumento34 pagineSecondary Storage DevicesPiyushE63Nessuna valutazione finora
- DMPCDocumento49 pagineDMPCiprassandyNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Interfaces KelloggDocumento16 pagineInterfaces KelloggUrrNessuna valutazione finora
- 1188CK ExampleDocumento2 pagine1188CK ExampleYurii ChinovNessuna valutazione finora
- Insurer Offer Letter DV 2Documento5 pagineInsurer Offer Letter DV 2Lycan de LunaNessuna valutazione finora
- Current Electricity All DerivationsDocumento11 pagineCurrent Electricity All DerivationsRonit VaskarNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Language Translation Software Market Industry Size, Share, Growth, Trends, Statistics and Forecast 2014 - 2020Documento9 pagineLanguage Translation Software Market Industry Size, Share, Growth, Trends, Statistics and Forecast 2014 - 2020api-289551327Nessuna valutazione finora
- 1MDS06004 en en REL 100 RELZ 100 Numerical Line Protection TerminalDocumento8 pagine1MDS06004 en en REL 100 RELZ 100 Numerical Line Protection TerminalRuhuluruj100% (1)
- d8n Wiring HardnessDocumento2 pagined8n Wiring HardnessandraNessuna valutazione finora
- Chapter 5Documento64 pagineChapter 5pintu13Nessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Size Matters: (Type The Document Subtitle)Documento16 pagineSize Matters: (Type The Document Subtitle)SamarthGoelNessuna valutazione finora
- A Curvature Compensated CMOS Bandgap Voltage ReferenceDocumento4 pagineA Curvature Compensated CMOS Bandgap Voltage ReferenceMuhammad_Swilam_2010Nessuna valutazione finora
- SAI GLOBAL, Index House, Ascot, Berks, SL5 7EU, UKDocumento73 pagineSAI GLOBAL, Index House, Ascot, Berks, SL5 7EU, UKtracyhopyNessuna valutazione finora
- Gama Dimat Catalog Be17Documento16 pagineGama Dimat Catalog Be17ELMIR ADILNessuna valutazione finora
- Operation Guide MSBDocumento8 pagineOperation Guide MSBMao RathanithNessuna valutazione finora
- Mobile Network LayerDocumento25 pagineMobile Network LayerAmrendra Kumar Mishra100% (2)
- ENG052010 Mechanic JD - 2Documento1 paginaENG052010 Mechanic JD - 2Satria SujatmikoNessuna valutazione finora
- Catalogo GIACOMINIDocumento45 pagineCatalogo GIACOMINIIsrael Silva Hgo.Nessuna valutazione finora
- Report Specification ExampleDocumento19 pagineReport Specification ExampleGarry RamirezNessuna valutazione finora
- Autovue IntegrationDocumento4 pagineAutovue IntegrationmansrallyNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)