Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Lab 2 Alejandro Sebastian Andres
Caricato da
Sebas ArevaloCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Lab 2 Alejandro Sebastian Andres
Caricato da
Sebas ArevaloCopyright:
Formati disponibili
Universidad de Nario. Arvalo, Bastidas, Mera. Cambio de Sentido de un Motor.
Universidad de Nario
Ingeniera Electrnica
1
ResumenEl nombre concreto y completo de la
prctica de laboratorio es: Diseo de un Sistema de
Control Digital para el Cambio de Sentido de Giro de un
Motor DC por conteo, la cual fue desarrollada con el
objetivo de mostrar en una aplicacin prctica, cmo se
forma un sistema digital completo a partir de funciones
bsicas que hemos venido estudiando. El diseo del sistema
digital realizado lleva consigo cuatro grandes etapas como
son: la etapa de Actuador, la etapa de Sensor, la etapa
de Control y por ltimo la etapa de Interfaz con el
Usuario que llevan articuladas dentro de s varias fases
las cuales sern expuestas a lo largo del informe, entre
ellas tenemos el ciclo de conteo, el ciclo de decodificacin,
los pulsos generados por el motor, el control de la
velocidad del motor, la visualizacin, entre otras, las cuales
cumplen una funcin individual, puntual y muy
importante en el sistema, para que luego sean acopladas y
constituyan un sistema digital completo.
ndice de Trminos Actuador, Circuito Integrado,
Control, Estado Lgico, Opto transistor, Sensor, Sistema de
control digital.
I. INTRODUCCIN
L siguiente informe es un documento que
evidencia el desarrollo de la segunda prctica de
laboratorio de la asignatura de Circuitos Digitales I.
Despus de haber estudiado y aprendido conceptos
bsicos de la electrnica digital, estando un poco
ms inmersos en el mbito de los sistemas digitales
y teniendo muy claros los conocimientos, podemos
desarrollar esta prctica de laboratorio no sin antes
rescatar algunas nociones importantes que pueden
ser tiles en el transcurso del laboratorio. El trmino
digital procede de la forma en que las computadoras
realizan las operaciones, es decir contando dgitos.
Hoy en da la electrnica digital no est
simplemente ligada a los sistemas informticos
como lo era hace algn tiempo, sino tambin en una
amplia variedad de reas. Se sabe muy bien que un
sistema de control digital es la combinacin de
componentes que actan conjuntamente y cumplen
un determinado objetivo. La finalidad de un
sistema de control es conseguir, mediante la
manipulacin de las variables de control, un
dominio sobre las variables de salida, de modo que
estas alcancen unos valores establecidos. Un
modelo claro es el diseo e implementacin del
sistema de control digital para el cambio de giro de
un motor, que de una forma amplia y muy general
cambia el sentido de giro del motor, dependiendo
del nmero de vueltas del mismo, sensadas por un
sistema ptico y representadas para el usuario por
medio de un visualizador de 7 segmentos. Como es
normal, el sistema desarrollado tambin est ligado
a los elementos bsicos que conforman un sistema
de control digital y permiten su manipulacin, como
lo son: Sensor; el cual permite conocer los valores
de las variables medidas del sistema, dichas
variables medidas son el nmero de vueltas que
efecta el motor, las cuales se convierten en pulsos.
Controlador; utilizando los valores determinados
por los sensores y la consigna impuesta, calcula la
accin que debe aplicarse para modificar las
variables de control en base a cierta estrategia, es
decir es la etapa en la cual se realiza un conteo de
los pulsos generados en la fase de sensado.
Actuador; es el mecanismo que ejecuta la accin
calculada por el controlador y que modifica las
variables de control, siendo este el ciclo de
accionamiento del motor usando un control de
velocidad en el sistema de control diseado.
II. DESARROLLO DE CONTENIDOS
A) Descripcin y Desarrollo de la Prctica.
i) Materiales y Componentes.
ii) Diseo y Funcionamiento.
B) Resultados.
Cambio de Sentido de Giro de un Motor DC por Conteo
Arvalo, Sebastin., Bastidas, Alejandro y Mera, Andrs.
{juanarevalo93; alejobaztidas; andresfe_mera}@hotmail.com
Universidad de Nario
E
Universidad de Nario. Arvalo, Bastidas, Mera. Cambio de Sentido de un Motor.
Universidad de Nario
Ingeniera Electrnica
2
C) Conclusiones.
Bibliografa.
A) Descripcin y Desarrollo de la Prctica.
i) Materiales y Componentes.
A continuacin, se lleva a cabo una breve
descripcin de los materiales y componentes
electrnicos usados en la prctica, teniendo en
cuenta su funcionamiento tanto individual como
colectivo.
Diodo 1N4007: Se utilizaron 4 diodos de
este tipo, formando un rectificador de onda
completa es decir un puente de diodos con el
objetivo de que acten como proteccin para
el motor DC.
Circuito Integrado 74HC00: Es un circuito
compuesto por compuertas NAND capaces
de negar la multiplicacin de las entradas.
En el sistema se lo encuentra en la
implementacin de un circuito de memoria.
Circuito Integrado 74HC14: Este circuito
est formado por compuertas NOT
encargadas de negar la entrada. Este
integrado fue usado en la salida del opto
transistor, tambin en la fase de conteo para
tener un eficiente control de las vueltas del
motor.
Circuito Integrado 74LS08: Este circuito
lleva compuertas AND capaces de
multiplicar las entradas. Fue de gran utilidad
en la etapa de control de revoluciones del
motor ya que con ayuda de este circuito se
logra limitar las vueltas que ejecuta el
motor.
Display LMS-5161AS: Es un visualizador de
7 segmentos capaz de mostrar los dgitos del
0 al 9. En la elaboracin del sistema se us
dos de la misma referencia en la etapa de
Interfaz con el usuario.
Opto transistor RPI-579N1E: Es un
dispositivo que se activa y entrega corriente
a travs de sus terminales solo cuando recibe
una emisin de luz en su base, cuando su
base recibe la seal luminosa el transistor
comienza a emitir su corriente.
El opto transistor se utiliza para aislar etapas
de un circuito cuando nos interesa tener una
etapa separada de la otra, pero que requiere
que exista comunicacin entre ellas, aqu es
donde aparece el opto transistor y permite
ejecutar esa tarea sin inconvenientes.
Motor DC 5V PPN7PA12C1: Se encuentra
en la etapa de Actuador, siendo el principal
protagonista ya que es el encargado de
efectuar las vueltas que sern captadas por el
opto transistor en el cual las convertir en
pulsos, generando una seal para que el
circuito contine con su proceso.
Puente H L293D: Es un circuito
electrnico integrado que generalmente es
utilizado para controlar el sentido de giro de
un motor, es decir permitir al motor girar en
ambos sentidos usando bsicamente el
sentido de la corriente.
Circuito Integrado NA555: Es un dispositivo
electrnico comnmente usado para el
control de velocidad de un motor DC. En la
implementacin este circuito funciona como
un PWM (modulador de ancho de pulso), el
cual para poder variar la velocidad del motor
hace uso de un potencimetro.
Decodificador 74HCT4511: En el sistema de
control este circuito es el encargado de
activar el display de 7 de segmentos ya que
cuando las entradas del decodificador
presentan un determinado cdigo binario, se
activan las lneas de salida y se iluminan los
correspondientes segmentos para mostrar el
nmero decimal.
Contador 74HC190: La funcin ms
importante del contador en la
implementacin es la de contar sucesos
representados por cambios de nivel o
impulsos que son generados en el
procedimiento por la etapa de sensado es
decir, el opto transistor.
Potencimetro 100K: Dispositivo utilizado
para variar la velocidad de las vueltas del
motor.
Resistencias 180, 1M y 1K: Usadas en
la conexin del opto transistor, el dip-switch
y el circuito de control de giro.
Universidad de Nario. Arvalo, Bastidas, Mera. Cambio de Sentido de un Motor.
Universidad de Nario
Ingeniera Electrnica
3
ii) Diseo y Funcionamiento.
En esta seccin se realizar una explicacin
detallada y adecuada de cada una de las etapas que
compone el sistema de control, resaltando el
funcionamiento de cada mdulo del circuito por
separado y de sus fases internas, para que as sea
ms comprensible el desarrollo y entendimiento del
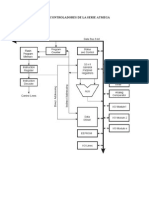
mismo. Las 3 etapas generales en las que est
dividido el sistema de control son: Actuador, Sensor
y Control. El sistema realizado tiene una etapa
adicional llamada Interfaz con el Usuario como lo
podemos ver en la Fig. 1, las cuales en conjunto
sern desarrolladas a continuacin:
1. Actuador: El diseo e implementacin de
esta etapa es de gran importancia as como
lo son el resto de etapas. Dentro de este
ciclo, se encuentra un dispositivo realmente
indispensable para el desarrollo, como lo es
el motor DC. Esta seccin se podra dividir
internamente en dos, la fase del control de la
velocidad del motor cuando efecta las
vueltas y la fase que facilita cambiar el
sentido de giro del motor. Se prueba el
circuito por separado para facilitar el
ensamble de estos dos ciclos. Primero se
implementa el ciclo de cambio de velocidad,
este se realiza con un circuito integrado
NA555, usando dos condensadores de 100nF
conectados a los pines 2, 6 y 5 llevados al
nodo comn o tierra, tambin se utiliza un
potencimetro de 100K conectado al pin 6
como se puede apreciar en la Fig. 2. El
funcionamiento del 555 en este ciclo es muy
similar al funcionamiento del mismo en
configuracin astable, con la caracterstica
adicional de que se puede modificar el
ancho del pulso a la salida de 555 usando el
pin 3. El propsito de este grupo de
componentes es regular los tiempos de carga
y descarga de condensador que est
conectado a los pines 2 y 6 y as establecer
el tiempo que el 555 tiene su salida en alto y
en bajo, variando el potencimetro de un
extremo a otro para pasar de un motor sin
movimiento a un motor a mxima velocidad,
facilitando que el opto transistor de la
siguiente etapa, pueda generar los pulsos.
A
hora se contina con la fase de cambio de
sentido de giro del motor. Para ello se us
un circuito integrado L293D, mejor
conocido como puente h, del cual se
conect los pines 3 y 6 al motor, la
energizacin de este integrado se la hace en
los pines 16 y 8 como se hace comnmente
en la mayora de integrados con 16 pines,
aunque existen algunos con una
configuracin distinta. El pin 1 de este
Fig. 1 Diagrama de bloques que representa en flujo
de seal del sistema de control.
Fig. 2 Conexin del circuito integrado 555 mostrando
nmero de los pines ms importantes, usados para la
implementacin de esta fase.
Universidad de Nario. Arvalo, Bastidas, Mera. Cambio de Sentido de un Motor.
Universidad de Nario
Ingeniera Electrnica
4
integrado controla la activacin y
desactivacin del motor por lo que la salida
del pin 3 del 555 es decir la modificacin
del ancho de pulso la conectamos a este pin
1 del L293D y de esta manera completamos
la implementacin de esta etapa. Para mayor
c
o
m
p
r
e
n
s
i
n
s
e
puede ver la Fig. 3 en seguida la cual
muestra el desarrollo de esta etapa.
2. Sensor: El diseo de esta etapa se lleva a
cabo usando un opto transistor siendo este el
aparato primordial como ya se haba
advertido.
E
l
o
p
to transistor es un dispositivo ptico
demasiado til en el desarrollo del sistema,
ya que gracias a su mecanismo de accin
que consiste en que cuando su base recibe
una seal luminosa, el transistor comienza a
emitir corriente, se logra producir un pulso
usando el giro del motor. En la figura 4 se
puede apreciar la conexin adecuada y usada
en la implementacin de la etapa de sensado.
Todo este funcionamiento lo podemos
ajustar en nuestro circuito de la siguiente
manera; Se sabe que en la etapa de Actuador
se encuentra el motor DC, el cual est
ejecutando un nmero de vueltas que seran
casi imposibles de contar sin usar un sistema
de sensado, por esta razn y usando la
cualidad del opto transistor antes referida, se
coloca en el eje del motor de forma
perpendicular una banda o lazo fijo, con el
fin de que corte instantneamente la seal
cuando se estn sensando las vueltas, lo que
nos producir un pulso que llega a la entrada
d
e
u
n
c
i
Fig.3 Implementacin de circuito integrado L293D
y especificacin de los pines conectados para el
cambio del sentido de giro del motor.
Fig. 5 Etapa de sensado de las vueltas
ejecutadas por el motor usando un opto
transistor.
Fig. 4 Modelo simulado en el programa
Multisim de un opto transistor teniendo en
cuenta sus conexiones a tierra y su energizacin
como tambin las resistencias adecuadas para
un ptimo funcionamiento.
Universidad de Nario. Arvalo, Bastidas, Mera. Cambio de Sentido de un Motor.
Universidad de Nario
Ingeniera Electrnica
5
rcuito integrado 74HC14 el cual acta como
negador y desde su salida enviar el pulso
hasta el contador 74CH190, quien como su
nombre lo dice contar este nmero de
pulsos o cambios de nivel generados por el
nmero de vueltas del motor. Se puede
observar la Fig. 5 la cual muestra la
implementacin real del circuito.
3. Control: Esta etapa inicia justo en el
momento en el cual se activa el contador
74HC190 con el pulso generado desde el
sensor. Este pulso es recibido en el pin 14
CLK del contador y transmitido desde los
pines 3, 2, 6 y 7 hasta un decodificador BCD
a 7 segmentos 74HCT4511. Para la
implementacin de esta etapa es muy
importante tener en cuenta los pines
utilizados por el contador. El pin 4 llamado
Enable sirve para habilitar o deshabilitar
el circuito integrado, por esta razn como es
activo bajo, debe estar conectado a la tierra
o comn del circuito. El pin 5 de este mismo
integrado llamado UP/DOWN es el
encargado de cambiar el sentido de conteo,
por esta razn est conectado con el L293D
y la salida del circuito de memoria. Existe
otro pin 11 PL el cual para la
implementacin fue conectado a un dip-
switch con el objetivo de que el contador
comience a contar desde 0. Los pines 1, 4,
15, 16 deben estar conectados a OV es decir
a la tierra del circuito para una mejor
implementacin. Despus de que el primer
display es decir el de las unidades cuenta de
0 a 9, el contador genera un pulso o seal
que es transmitida desde el pin 13 RCO la
cual ser recibida por el otro contador en el
pin 14 CLK con el fin de activar el
segundo decodificador y este a su vez
impulsa al segundo display para que
contine el conteo normal. Esta etapa de
control aun contina con el control DC, es
decir usando los pines de salida del contador
para efectuar un cambio de sentido de giro
del motor en un nmero indicado de
revoluciones, en este caso 86. En primera
instancia fue necesario crear la forma en
cmo se usaran esas revoluciones; tomando
como punto de partida el hecho de que el
sentido de giro y la forma de conteo
cambiaran cuando en los displays se
pudieran visualizar el 86 y el 00, usando esta
idea, se estipulo que al momento de que el
primer display mostrase el numero 6
(display encargado de mostrar las unidades),
y el segundo display mostrase el numero
8(display encargado de mostrar las
decenas),o que ambos displays mostrasen al
mismo tiempo el nmero 0, ser el momento
que deber ser usado; para ello se usaron las
salidas provenientes del contador. Cuando
estos mostraran el nmero 86 se tendra que
8
10
= 1000
2
y 6
10
= 0110
2
, por tanto se busca
la forma de que cuando esto ocurra se
obtenga de salida el estado lgico "1" para
ello se hace uso de los min-trminos
obteniendo as que en caso del 6 se nieguen
el bit ms significativo y el menos
significativo multiplicndose a su vez con
los bits restantes que no han sido negados,
en el caso del 8 el bit ms significativo sera
el nico que no se negase y tambin seria
multiplicado con los bits negados, debido a
que el 6 y el 8 se muestran en ms de una
ocasin, las salidas de estos dos nmeros
deben multiplicarse para que muestre el
estado lgico "1" solamente en el nmero
86; en el caso de que los displays muestren
el 00, todas las entradas debern ser negadas
para su respectivo display y como en el caso
anterior multiplicadas entre s para que
solamente funcione en 00.
Universidad de Nario. Arvalo, Bastidas, Mera. Cambio de Sentido de un Motor.
Universidad de Nario
Ingeniera Electrnica
6
Despus de estipular la forma donde
sucedera el cambio de sentido de giro y
forma de conteo el siguiente inconveniente
es que al llegar 86 el cambio sucede, pero en
el nmero 85 vuelve a suceder el cambio ya
que se est cambiando de estado por lo cual
se encontrara en un ciclo infinito, para
resolver el problema se hace uso del circuito
de memoria en el cual se requieren dos
estados, en el cual un estado depende del
otro y no de el mismo por lo cual se usa en
esta ocasin usando como estados la salida
correspondiente a la representacin del
nmero 86 y la representacin del nmero
00 que se visualizan en los displays.
Finalmente una de las dos salidas del
circuito de memoria seria aquella que
estableciera el cambio de sentido del giro
del motor y la forma de conteo que se
visualiza en los contadores. La Fig. 6
muestra la conexin adecuada del circuito,
para obtener los nmeros 86 y 00 en los
displays usando un conjunto de compuertas
ubicadas en forma conveniente para la
implementacin.
4. Interfaz Con El Usuario: Esta etapa tiene un
grado igual de relevancia que las anteriores.
En este ciclo se trabaja con un decodificador
74HCT4511, el cual recibe en sus entradas
es decir los pines 7, 1, 2 y 6 las salidas del
contador. Como se sabe un decodificador
lleva la seal de un sistema numrico a otro,
de esta manera la seal que es recibida desde
el contador, el decodificador la transmite por
medio de sus salidas es decir los pines desde
el 9 hasta el 15 activando el display 7
segmentos LMS-5161AS de ctodo comn.
En la implementacin, se tiene en cuenta
que los pines 3, 4 y 5 del decodificador
deben estar simultneamente conectado a
tierra del circuito. El display es de ctodo
comn, es decir que los pines 3 y 8 se
encuentran conectados a tierra. Las entradas
del display vienen dadas por letras desde la
a hasta la g las cuales se conectan
siguiendo las condiciones establecidas en el
datasheet. La Fig. 7 es un ejemplo claro y
muestra los pines ms importantes usados
para una apropiada conexin de los circuitos
integrados.
B) Resultados
Despus de haber hecho una explicacin
detallada del diseo y del funcionamiento del
sistema de control, en esta seccin del informe se
van a discutir y analizar los resultados de la
prctica, tanto de forma experimental como en la
simulacin.
Fig. 6 Diagrama de bloques de la conexin
apropiada en el proceso de obtencin de los
nmeros 86 y 00 para el conteo limitado de las
vueltas del motor.
Fig. 7 Implementacin de la etapa de interfaz con el
usuario y la etapa de control. Se redujo el nmero de
pines indicados por motivos de saturacin de la imagen.
Universidad de Nario. Arvalo, Bastidas, Mera. Cambio de Sentido de un Motor.
Universidad de Nario
Ingeniera Electrnica
7
En primera instancia se realizara una
comparacin cualitativa entre la simulacin del
sistema y la implementacin experimental. Al igual
como lo hicimos experimentalmente la simulacin
fue realizada parte a parte para as poder entender
mejor el funcionamiento y el cableado de cada
componente. En la simulacin, primero se conecta
un contador de la misma referencia del usado en la
implementacin experimental, en seguida
conectamos un decodificador pero este de distinta
referencia 74LS48 pero que cumple con la misma
funcin y por ltimo el display de 7 segmentos de
ctodo comn. Para poder generar los cambios de
nivel en el contador, se conecta en el pin 14 un
generador de pulso y de esta manera se puede
observar como el display muestra los nmeros del 0
al 9. Se debe tener en cuenta tambin el pin de
habilitacin nmero 4 y el pin que nos permite
cambiar de sentido el conteo pin nmero 5, tanto en
la simulacin y en la parte experimental. Ahora, en
la parte experimental se usa un dip-switch para
poder mostrar los nmeros del 0 hasta el 9, mientras
en la simulacin el pin nmero 11 PL se debe
encontrar en estado lgico 1 para que las entradas
estn deshabilitadas, en la parte experimental
debemos colocarlo a OV, es decir a tierra para que
las entradas del contador 15, 1, 10 y 9 se encuentren
habilitadas para conectar el ya nombrado dip-
switch. Luego, en la simulacin se intenta
sincronizar el segundo contado por medio del pin 13
RCO del primer contador que transmite la seal,
este proceso se realiza de manera similar en la
implementacin experimental. Existen puntos en los
cuales la simulacin y la implementacin difieren,
uno de ellos radica en la conexin de pines; ya que
muchas veces en la simulacin los circuitos
integrados no cuentan con la totalidad de ellos para
hacer un proceso ms fcil, pero esto puede traer
problemas en la implementacin ya que en la
conexin la mayora de pines son importantes para
un buen desarrollo.
En la simulacin se procede establecer el
funcionamiento del circuito de memoria la cual
cumple la funcin de guardar el estado proveniente
de las funciones de los nmeros 86 y 00 las cuales
al llegar a esos nmeros deba cambiar el sentido de
conteo de ascendente al llegar al nmero 00 a
descendente al llegar al nmero 86. Para la
implementacin experimental, en primera instancia,
se mont el circuito de memoria usando dos LED a
las salidas y un dip-switch en las entradas para
poder cambiar de estado, esto nos trajo resultados
satisfactorios.
A continuacin, se prob el cambio de sentido
usando la memoria ya simulada antes, en esta etapa
el dispositivo encargado de esta funcin es el puente
h conectado al motor DC, el cual tiene la mayor
parte de su conexin igual a la experimental,
simplemente que la energizacin en la simulacin
se hace por separado, mientras en la experimental,
se energiza todo el circuito con 5V.
Por ultimo viene el cambio del ancho de pulso
con un circuito integrado 555, es decir el control de
la velocidad del motor, el cual tiene un proceso de
conexin idntico al experimental. Al tener
funcionando cada circuito por aparte se procede a
ensamblar todo con los pines respectivos de cada
integrado. En este punto se presenta un problema
que no se present en la parte experimental que fue
el del cambio de velocidad del motor ya que al
conectar la salida del ancho de pulso pin 3 del 555
al pin 1 Enable del puente h en la simulacin el
motor no prende, en este caso los resultados no
fueron los requeridos, pero por el contrario en la
implementacin experimental obtuvimos resultados
satisfactorios en el control de la velocidad y el resto
de fases.
C) Conclusiones
Durante la implementacin del sistema de
control, siempre se tuvo en mente intentar
lograr un sistema ideal, pero en el proceso se
presentan inconvenientes que no permiten
garantizar la estabilidad.
Como se ha comprobado en muchas
ocasiones, el montaje experimental no
siempre da los resultados esperados, lo cual
demuestra el hecho que, a pesar de saber qu
es lo que se debe hacer y cul es el objetivo
que se quiere lograr, siempre se debe estar
atento a los problemas que se puedan
presentar y buscar alternativas para
solucionarlo, tomando como partida, que un
Universidad de Nario. Arvalo, Bastidas, Mera. Cambio de Sentido de un Motor.
Universidad de Nario
Ingeniera Electrnica
8
simple cable puede cambiar todos los
resultados de un experimento.
El hecho de que un circuito alterne entre
varios estados y se desee usar solamente
algunos de ellos implica un problema. Un
circuito de memoria permite no preocuparse
de ello ya que este depende de los estados
que se tienen como prioridad,
proporcionando as la opcin de utilizar
estos segn como se crea conveniente
respecto al circuito que se est montando.
Para facilitar una simulacin y por ende una
buena implementacin, se prueba cada
mdulo del circuito por separado y luego se
acopla en un circuito completo.
En el montaje del circuito encargado del
cambio de velocidad del motor, se necesita
especficamente un potencimetro igual a
mayor a 100K para poder ver los cambio
de velocidad, un potencimetro de menor
capacidad no produce un resultado
adecuado.
Para un sistema de control digital como el
realizado en esta prctica, se debe tener en
cuenta los elementos que pueden realmente
influir en el funcionamiento, es decir que
una buena manipulacin de las variables de
control, traer como resultado que las
variables de salida alcancen los valores
requeridos por el sistema.
Otro aspecto importante establece que se
debe tener muy presente las conexiones de
los circuitos integrados usando el datasheet
de cada uno de ellos, para as tener un
excelente resultado.
Es muy importante realizar el diseo de los
circuitos usando un cable a ras, es decir a
nivel de la protoboard para que as sea
mucho ms fcil su comprensin.
Antes de iniciar con la prctica de
laboratorio, se debe tener muy claro el
funcionamiento de cada uno de los circuitos
integrados y dems dispositivos usados, para
realizar un buen uso de ellos y no tener
percances en el desarrollo.
RECONOCIMIENTO
Queremos presentar un gran reconocimiento al Ph
D. Javier Revelo ya que gracias a su apoyo y su
excelente cualidad para explicar la temtica,
pudimos realizar una buena prctica de laboratorio.
BIBLIOGRAFIA
Thomas L. Floyd, Fundamentos de
Sistemas Digitales Sptima Edicin.
PEARSON EDUCATION, SA, Madrid
2000.
Pginas Web
http://www.unicrom.com/cir_control-motor-
dc-555.asp
http://electronicavm.files.wordpress.com/20
11/04/c-i-555.pdf
http://upcommons.upc.edu/pfc/?locale=es
Potrebbero piacerti anche
- Kolida - Spanish MANUALDocumento145 pagineKolida - Spanish MANUALSarah RussoNessuna valutazione finora
- MF0490 3 Cap3 v4 FormatoDocumento148 pagineMF0490 3 Cap3 v4 FormatoMorDiopDiabyNessuna valutazione finora
- Manual SensorGuard en EspañolDocumento58 pagineManual SensorGuard en Españolrubenest149411Nessuna valutazione finora
- Construction Leica MaxDocumento41 pagineConstruction Leica Max353JuanNessuna valutazione finora
- Producto EscalarDocumento5 pagineProducto EscalarSebas ArevaloNessuna valutazione finora
- Taller 1 Electronic A IDocumento2 pagineTaller 1 Electronic A IdiegodddNessuna valutazione finora
- Problemas IntroduccionDocumento2 pagineProblemas IntroduccionSebas ArevaloNessuna valutazione finora
- Taller Ciclos ElectronicaDocumento3 pagineTaller Ciclos ElectronicaSebas ArevaloNessuna valutazione finora
- LogicaDocumento1 paginaLogicaSebas ArevaloNessuna valutazione finora
- Taller 2Documento7 pagineTaller 2Fabio RubioNessuna valutazione finora
- Parcial 1Documento2 pagineParcial 1Sebas ArevaloNessuna valutazione finora
- Pipes and FiltersDocumento4 paginePipes and FiltersErick Henriquez RojasNessuna valutazione finora
- Acceso Directo A MemoriaDocumento21 pagineAcceso Directo A MemoriaJosé ManuelNessuna valutazione finora
- Qué Es La Memoria VirtualDocumento9 pagineQué Es La Memoria VirtualJosue GoyesNessuna valutazione finora
- Diseño de Circuitos LogicosDocumento36 pagineDiseño de Circuitos LogicosFabian CasteloNessuna valutazione finora
- Instrucciones AVRDocumento40 pagineInstrucciones AVRhandres_henaoNessuna valutazione finora
- BURY-EasyTouch Manual ESDocumento25 pagineBURY-EasyTouch Manual ESJuan MardonesNessuna valutazione finora
- Manual E-Reader BQDocumento45 pagineManual E-Reader BQJudith Egea DiazNessuna valutazione finora
- Frecuencia de Datos de Memoria y Bancos de ExpansiónDocumento4 pagineFrecuencia de Datos de Memoria y Bancos de ExpansiónEdwin FloresNessuna valutazione finora
- Resumen de Tipos de Datos (Visual Basic)Documento3 pagineResumen de Tipos de Datos (Visual Basic)Rubén Limachi CondoriNessuna valutazione finora
- Componentes de Un ProcesadorDocumento6 pagineComponentes de Un Procesadorcherrybluemonzter100% (5)
- Satellite L755 SP5204CL Spec SPDocumento4 pagineSatellite L755 SP5204CL Spec SPdametiNessuna valutazione finora
- Manual de Practicas y Antologia de Informatica I 1a Parte 2010-2011Documento63 pagineManual de Practicas y Antologia de Informatica I 1a Parte 2010-2011Mariana Mojica OchoaNessuna valutazione finora
- Centro de Mecanizado CNCDocumento9 pagineCentro de Mecanizado CNCAndrey PuentesNessuna valutazione finora
- ssp326 - E3 AUDI A6 Electronica 3 PDFDocumento32 paginessp326 - E3 AUDI A6 Electronica 3 PDFCarlos Garcia GodoyNessuna valutazione finora
- Efecto Memoria en Baterias de LitioDocumento6 pagineEfecto Memoria en Baterias de LitioAdrian GustavoNessuna valutazione finora
- Aplicación de WordPadDocumento7 pagineAplicación de WordPadDaniela DuránNessuna valutazione finora
- M0027 UD12 EFbDocumento5 pagineM0027 UD12 EFbLoli3101Nessuna valutazione finora
- Prácticas de Primero de SecundariaDocumento50 paginePrácticas de Primero de SecundariaViviana MendozaNessuna valutazione finora
- Manual Operacion PCDocumento82 pagineManual Operacion PCClever Paredes LaricoNessuna valutazione finora
- Componentes de Un ProyectoDocumento4 pagineComponentes de Un ProyectoOlmo Correcher GonzaloNessuna valutazione finora
- MULTIMEDIA InformaticaDocumento30 pagineMULTIMEDIA InformaticavaiutolflyfNessuna valutazione finora
- TP 3 Arquitectura Del ComputadorDocumento6 pagineTP 3 Arquitectura Del ComputadorJavierMartinez100% (1)
- ICEE1012 Capitulo 5 La MemoriaDocumento101 pagineICEE1012 Capitulo 5 La MemoriaZapatoCuadradoNessuna valutazione finora
- Ejercicios MemoriaDocumento3 pagineEjercicios MemoriaYetza SëquërãNessuna valutazione finora
- Trabajo SocialDocumento15 pagineTrabajo SocialDhiego Go'gooNessuna valutazione finora
- PLCDocumento16 paginePLCDaniel JacksonNessuna valutazione finora