Potrebbero piacerti anche
- Montaje y mantenimiento de transformadores. ELEE0109Da EverandMontaje y mantenimiento de transformadores. ELEE0109Nessuna valutazione finora
- Cuestionario Practica 4Documento1 paginaCuestionario Practica 4Beth ValerdiNessuna valutazione finora
- Parametros de Los A.ODocumento15 pagineParametros de Los A.OKevin Higuita0% (1)
- Reloj Digital Con ContadoresDocumento3 pagineReloj Digital Con ContadoresALEXNessuna valutazione finora
- Convertidor de Corriente Alterna A Corriente Alterna Trifásico Tipo Regulador Con Carga ResistivaDocumento3 pagineConvertidor de Corriente Alterna A Corriente Alterna Trifásico Tipo Regulador Con Carga ResistivaalfredoNessuna valutazione finora
- El Transistor Como AmplificadorDocumento4 pagineEl Transistor Como AmplificadorMARTIN RODOLFO LIZOLA GOMEZNessuna valutazione finora
- Convertidores DC - DCDocumento23 pagineConvertidores DC - DCbryan beltran adrian0% (1)
- MCT TiristorDocumento2 pagineMCT TiristorGonzalo ViñamaguaNessuna valutazione finora
- Amplificadores OperacionalesDocumento35 pagineAmplificadores OperacionalesJuanCarlos UmgNessuna valutazione finora
- Fuente Bipolar RegulableDocumento2 pagineFuente Bipolar RegulableGuti A. GutierrezNessuna valutazione finora
- AO Circuitos básicosDocumento18 pagineAO Circuitos básicosIgnacio Mortera MarquezNessuna valutazione finora
- Examen 1 FotodiodoDocumento2 pagineExamen 1 FotodiodoChiio RescNessuna valutazione finora
- Rectificadores TrifásicosDocumento7 pagineRectificadores TrifásicosManu Ace100% (1)
- Cargador de CelularDocumento10 pagineCargador de CelularDiego PérezNessuna valutazione finora
- Circuitos Recortadores de OndaDocumento3 pagineCircuitos Recortadores de OndaInés MasaquizaNessuna valutazione finora
- Diodo Schottky: Características y AplicacionesDocumento13 pagineDiodo Schottky: Características y AplicacionesAbel JmcNessuna valutazione finora
- Electronica de Potencia Cap1Documento4 pagineElectronica de Potencia Cap1Javier Paredes SanchezNessuna valutazione finora
- Similitudes y Diferencias Entre Tecnologias de Power MosfetDocumento4 pagineSimilitudes y Diferencias Entre Tecnologias de Power MosfetWilliam SolarteNessuna valutazione finora
- DetectoresCruceCeroSCRDocumento8 pagineDetectoresCruceCeroSCRBriian EnriqueNessuna valutazione finora
- Parametros de Rendimiento de Los Rectificadores - ModificadaDocumento11 pagineParametros de Rendimiento de Los Rectificadores - ModificadaferminNessuna valutazione finora
- Tarea-Inv. Convertidores CD-CDDocumento12 pagineTarea-Inv. Convertidores CD-CDerik garciaNessuna valutazione finora
- Rectificador Controlado de Silicio (SCRDocumento8 pagineRectificador Controlado de Silicio (SCRaleNessuna valutazione finora
- Interruptores y dispositivos de protección eléctricaDocumento28 pagineInterruptores y dispositivos de protección eléctricaleinad152414Nessuna valutazione finora
- 1.3 Circuitos Rectificadores de Onda CompletaDocumento5 pagine1.3 Circuitos Rectificadores de Onda CompletaNilsonNessuna valutazione finora
- Electrónica de Potencia IDocumento6 pagineElectrónica de Potencia IJOHANNA LAMEDANessuna valutazione finora
- Aplicaciones de InversoresDocumento8 pagineAplicaciones de InversoresYoel Ballena SiesquenNessuna valutazione finora
- Diodos de potencia: características y aplicacionesDocumento48 pagineDiodos de potencia: características y aplicacionesEmmanuel Obispo0% (1)
- INFORME Final Practica 5Documento9 pagineINFORME Final Practica 5SCNessuna valutazione finora
- Informe 3 PutDocumento5 pagineInforme 3 PutEdison AlvearNessuna valutazione finora
- Conclusiones Etn - 503Documento4 pagineConclusiones Etn - 503Aldo Alarcon ContrerasNessuna valutazione finora
- Curva Caracteristica y Parametros Del UJTDocumento12 pagineCurva Caracteristica y Parametros Del UJTCésar Augusto Núñez Donado0% (3)
- Fuente Aparente DependienteDocumento4 pagineFuente Aparente DependienteJulio SalazarNessuna valutazione finora
- Conformadores de OndaDocumento7 pagineConformadores de OndaCarolina Castro VillacìsNessuna valutazione finora
- Control PID de un circuito RLCDocumento7 pagineControl PID de un circuito RLCMarisol Tancara RoqueNessuna valutazione finora
- Exposicion CD CDDocumento2 pagineExposicion CD CDfabbynandaNessuna valutazione finora
- Preguntas de La Guia 1 de DiodosDocumento2 paginePreguntas de La Guia 1 de Diodosedwinri100% (2)
- Informe TiristoresDocumento6 pagineInforme TiristoresJose ArrazolaNessuna valutazione finora
- Practica 4 Transistor BipolarDocumento23 paginePractica 4 Transistor BipolarGodFatherGFNessuna valutazione finora
- Rectificadores de Media OndaDocumento12 pagineRectificadores de Media Ondabrandon ocupa arbildoNessuna valutazione finora
- Sujetadores y RecortadoresDocumento11 pagineSujetadores y RecortadoresTazann24100% (3)
- Construcción y Tipos de Op'Amp'sDocumento7 pagineConstrucción y Tipos de Op'Amp'sDenise Gomez Ruyter0% (1)
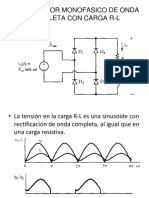
- Rectificador monofásico onda completa carga RL-generadorDocumento14 pagineRectificador monofásico onda completa carga RL-generadorANA BELEN MORENO CORDOVANessuna valutazione finora
- Trabajo de Investigación 3 ELA2Documento7 pagineTrabajo de Investigación 3 ELA2Juan David Rodriguez BeltranNessuna valutazione finora
- Estructura básica de un programa en mikroC PRODocumento10 pagineEstructura básica de un programa en mikroC PROelymar3Nessuna valutazione finora
- Reguladores - de - Voltaje - C.I.Documento48 pagineReguladores - de - Voltaje - C.I.edwards100% (1)
- Polarizacion Del DiodoDocumento38 paginePolarizacion Del DiodoMarx CortesNessuna valutazione finora
- Filtros Sallen KeyDocumento28 pagineFiltros Sallen KeyENIC-AITCGNessuna valutazione finora
- Informe 13Documento8 pagineInforme 13Juan Jesus Figueroa ChipanaNessuna valutazione finora
- Dipswitch suma y multiplicaDocumento2 pagineDipswitch suma y multiplicaOskar100% (1)
- Amplificadores y filtros operaciones claveDocumento2 pagineAmplificadores y filtros operaciones claveTania TorresNessuna valutazione finora
- Principios convertidores AC-ACDocumento5 paginePrincipios convertidores AC-ACLuz Elena Mendoza LuisNessuna valutazione finora
- Informe Fuente BuckDocumento4 pagineInforme Fuente BuckJulián RincónNessuna valutazione finora
- Circuitos de Disparo R, RC y Doble RCDocumento17 pagineCircuitos de Disparo R, RC y Doble RCEdnnaNessuna valutazione finora
- Conversores ADDocumento7 pagineConversores ADPablo RafaelNessuna valutazione finora
- Unidad II: Convertidores AC - DC (Rectificadores)Documento55 pagineUnidad II: Convertidores AC - DC (Rectificadores)pabloNessuna valutazione finora
- Control de Un ServomotorDocumento12 pagineControl de Un ServomotorGabriel Atenco100% (1)
- Reporte Practica 1 Diodo de UniónDocumento8 pagineReporte Practica 1 Diodo de UniónJuventino Saucedo Navarro0% (1)
- Practica7 SeñalesDocumento21 paginePractica7 SeñalesAngel Vidals VazquezNessuna valutazione finora
- Copia de Guia 6 - Puente HDocumento10 pagineCopia de Guia 6 - Puente HDANNA STEPHANIA GALVIS TARAZONANessuna valutazione finora
- Circuito de fuerza motor trifásico inversión giroDocumento9 pagineCircuito de fuerza motor trifásico inversión giroJustin FelicesNessuna valutazione finora
- Celebración de la interculturalidad y pluriculturalidad en EcuadorDocumento5 pagineCelebración de la interculturalidad y pluriculturalidad en EcuadorEdy CrackmasterNessuna valutazione finora
- Introduccion A La Quimica para Primero de SecundariaDocumento3 pagineIntroduccion A La Quimica para Primero de SecundariaAnonymous wQ4ReuH0% (1)
- Tercer Dia Del TriduoDocumento2 pagineTercer Dia Del TriduoEdy CrackmasterNessuna valutazione finora
- Actividades de Fisica de Masaquiza y LlerenaDocumento2 pagineActividades de Fisica de Masaquiza y LlerenaEdy CrackmasterNessuna valutazione finora
- Triduo 2021Documento3 pagineTriduo 2021Edy CrackmasterNessuna valutazione finora
- Celebración de la interculturalidad y pluriculturalidad en EcuadorDocumento5 pagineCelebración de la interculturalidad y pluriculturalidad en EcuadorEdy CrackmasterNessuna valutazione finora
- AutoconocimientoDocumento6 pagineAutoconocimientoEdy Crackmaster100% (1)
- Deber 5Documento1 paginaDeber 5Edy CrackmasterNessuna valutazione finora
- Guia DidacticaDocumento101 pagineGuia DidacticaEdy CrackmasterNessuna valutazione finora
- Cabarmoxi PDFDocumento51 pagineCabarmoxi PDFChristian CcapchaNessuna valutazione finora
- Problemas y Ejercicios de Areas de PoligonosDocumento7 pagineProblemas y Ejercicios de Areas de PoligonosskilachNessuna valutazione finora
- Analizador de Trafico de RedDocumento44 pagineAnalizador de Trafico de Redjavier_videla921Nessuna valutazione finora
- FusionDocumento4 pagineFusionEdy CrackmasterNessuna valutazione finora
- ESTADISTICADocumento18 pagineESTADISTICAEdy CrackmasterNessuna valutazione finora
- Control FractalDocumento4 pagineControl FractalEdy CrackmasterNessuna valutazione finora
- Control FractalDocumento4 pagineControl FractalEdy CrackmasterNessuna valutazione finora
- Control FractalDocumento4 pagineControl FractalEdy CrackmasterNessuna valutazione finora
- SCR ExposicionDocumento14 pagineSCR ExposicionEdy CrackmasterNessuna valutazione finora
- Tabla1 00Documento30 pagineTabla1 00Edy CrackmasterNessuna valutazione finora
- 1 Elementos de MandoDocumento13 pagine1 Elementos de Mandoalph05Nessuna valutazione finora
- Estudiar PrincipalDocumento14 pagineEstudiar PrincipalEdy CrackmasterNessuna valutazione finora
- EjercicioDocumento7 pagineEjercicioEdy CrackmasterNessuna valutazione finora
- Deber 1 Maquinas 2Documento5 pagineDeber 1 Maquinas 2Edy CrackmasterNessuna valutazione finora
- MundoDocumento10 pagineMundoEdy CrackmasterNessuna valutazione finora
- RuidoDocumento4 pagineRuidoEdy CrackmasterNessuna valutazione finora
- IODocumento46 pagineIOEdy CrackmasterNessuna valutazione finora
- Censo de CargaDocumento2 pagineCenso de CargaEdy CrackmasterNessuna valutazione finora
- Modelos MatematicosDocumento8 pagineModelos MatematicosEdy CrackmasterNessuna valutazione finora
- WIRELESSHARTDocumento5 pagineWIRELESSHARTEdy CrackmasterNessuna valutazione finora
- Ejemplo de ProgramasDocumento22 pagineEjemplo de ProgramasEdy CrackmasterNessuna valutazione finora
- Sistema de Alimentación Ininterrumpida para Circuitos Con PICDocumento4 pagineSistema de Alimentación Ininterrumpida para Circuitos Con PICRoyer Quispe FloresNessuna valutazione finora
- Convertidor FlybackDocumento12 pagineConvertidor FlybackÀlvàròLèdòPèlàèzNessuna valutazione finora
- Manual Basico de Microcontroladores PicDocumento68 pagineManual Basico de Microcontroladores PicCarls Guiovani Guirrardelli VegaNessuna valutazione finora
- Segmentación, ganancias y productividad en caucesDocumento45 pagineSegmentación, ganancias y productividad en caucesFabioLa Meliza Madueño TNessuna valutazione finora
- Construccion de TV Cable GratisDocumento4 pagineConstruccion de TV Cable GratisJunior Torrez ZallesNessuna valutazione finora
- G1.Larrea - Criollo.eddy - Sistemas de Comunicacion de DatosDocumento19 pagineG1.Larrea - Criollo.eddy - Sistemas de Comunicacion de DatosLeonardoNessuna valutazione finora
- Cuestionario PrevioDocumento5 pagineCuestionario PrevioCanalDTodoUnPoco PCNessuna valutazione finora
- Sistemas Digitales y Perifericos Actividad Semana 3Documento3 pagineSistemas Digitales y Perifericos Actividad Semana 3Sjd SjdNessuna valutazione finora
- SockerDocumento10 pagineSockerMosquera Ibarguen RichardNessuna valutazione finora
- Muestreo y retención con 555Documento4 pagineMuestreo y retención con 555Cesar Patiño100% (2)
- El AutotransformadorDocumento28 pagineEl Autotransformadormamani mamani paulNessuna valutazione finora
- Amplificadores A VálvulasDocumento6 pagineAmplificadores A VálvulasMiguelAndresFajardoHernandezNessuna valutazione finora
- HT S3500 EspanolDocumento72 pagineHT S3500 EspanolOscar DanielNessuna valutazione finora
- Alien SP18Documento3 pagineAlien SP18gerardgm6094Nessuna valutazione finora
- Metas de Uso de Espectro Re - b6br9bDocumento3 pagineMetas de Uso de Espectro Re - b6br9bFrank Prieto TejadaNessuna valutazione finora
- Compuertas Básicas - Introduccià NDocumento2 pagineCompuertas Básicas - Introduccià NDiana MeraNessuna valutazione finora
- Microprocesadores y Programacion AssemblerDocumento96 pagineMicroprocesadores y Programacion Assemblerjotape666100% (3)
- Mapa Conceptual de La Arquitectura Laura Guevara PDFDocumento1 paginaMapa Conceptual de La Arquitectura Laura Guevara PDFNiyirethCangrejoSeguraNessuna valutazione finora
- ComSerial PIC-PC USARTDocumento8 pagineComSerial PIC-PC USARTDavid Mercado BNessuna valutazione finora
- Laboratorio 2Documento5 pagineLaboratorio 2Daniel Quesada BejaranoNessuna valutazione finora
- Circuito Cargador Solar 12VDocumento5 pagineCircuito Cargador Solar 12VProspero Araya FuentesNessuna valutazione finora
- Proyecto Antenas Yagi Leynner SequeraDocumento19 pagineProyecto Antenas Yagi Leynner SequeraLeynner SequeraNessuna valutazione finora
- PAE RogerRaventos JuanCamara Practica3Documento21 paginePAE RogerRaventos JuanCamara Practica3Anonymous ccGNagfmGNessuna valutazione finora
- Presentacion El Transistor PDFDocumento37 paginePresentacion El Transistor PDFMiguel Cayuela de PedroNessuna valutazione finora
- Cuestionario TicsDocumento4 pagineCuestionario TicsvenforstalNessuna valutazione finora
- Simulación parámetros antenas linealesDocumento30 pagineSimulación parámetros antenas linealesj7d7ye-709337Nessuna valutazione finora
- LAB 7-2020-II - CIRCUITOS DIGITALES II - Análisis y Diseño de Circuitos Secuenciales - Modelo Tipo Moore y Modelo Tipo MealyDocumento2 pagineLAB 7-2020-II - CIRCUITOS DIGITALES II - Análisis y Diseño de Circuitos Secuenciales - Modelo Tipo Moore y Modelo Tipo MealyLuis Misiyauri GutiérrezNessuna valutazione finora
- Laboratorio Electrónica 3 RlEDocumento22 pagineLaboratorio Electrónica 3 RlEEDISON JAIMENessuna valutazione finora
- Resolucion Directoral MTC para HomologacionDocumento28 pagineResolucion Directoral MTC para HomologacionMax Fredi Quispe AguilarNessuna valutazione finora
- XML OM SP v1Documento32 pagineXML OM SP v1celiaNessuna valutazione finora