Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Steel Tear Plate FT Toles Larmees EngDocumento2 pagineSteel Tear Plate FT Toles Larmees EngmikimecNessuna valutazione finora
- Lifting SolutionsDocumento26 pagineLifting SolutionsmikimecNessuna valutazione finora
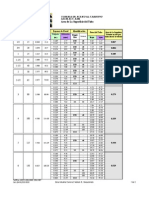
- Tabla de especificaciones de tubería de acero al carbono ASTM A53/A106 con diámetros de 1/2 a 6Documento3 pagineTabla de especificaciones de tubería de acero al carbono ASTM A53/A106 con diámetros de 1/2 a 6reblas100% (6)
- SM 3 D Upgrade GuideDocumento49 pagineSM 3 D Upgrade GuideSridhara SriNessuna valutazione finora
- Ammonia StrippingDocumento15 pagineAmmonia StrippingFaiqoh NahareyNessuna valutazione finora
- Tabla de especificaciones de tubería de acero al carbono ASTM A53/A106 con diámetros de 1/2 a 6Documento3 pagineTabla de especificaciones de tubería de acero al carbono ASTM A53/A106 con diámetros de 1/2 a 6reblas100% (6)
- DWG SpecsDocumento11 pagineDWG SpecsFrank SandorNessuna valutazione finora
- Deadmancontrolsystem Electric PDFDocumento5 pagineDeadmancontrolsystem Electric PDFmikimecNessuna valutazione finora
- AutoCAD Shortcuts 11x8.5 MECH-REV PDFDocumento11 pagineAutoCAD Shortcuts 11x8.5 MECH-REV PDFKristijan BorasNessuna valutazione finora
- Sample Calculation ReportDocumento9 pagineSample Calculation ReportmikimecNessuna valutazione finora
- ANSI C80.1 Rigid Steel Conduit For Zinc CoatedDocumento13 pagineANSI C80.1 Rigid Steel Conduit For Zinc CoatedJuan Pablo Guaman AyalaNessuna valutazione finora
- Ansi Isa RP12.6Documento52 pagineAnsi Isa RP12.6barondiego100% (3)
- Piping Terms Glossary PDFDocumento24 paginePiping Terms Glossary PDFmikimecNessuna valutazione finora
- Piping Terms Glossary PDFDocumento24 paginePiping Terms Glossary PDFmikimecNessuna valutazione finora
- Flexpipe Systems Comments For TrenchingDocumento3 pagineFlexpipe Systems Comments For TrenchingmikimecNessuna valutazione finora
- Flexpipe Systems Comments For TrenchingDocumento3 pagineFlexpipe Systems Comments For TrenchingmikimecNessuna valutazione finora
- Flexible pipe specifications and pressure ratingsDocumento1 paginaFlexible pipe specifications and pressure ratingsmikimecNessuna valutazione finora
- Flexible pipe specifications and pressure ratingsDocumento1 paginaFlexible pipe specifications and pressure ratingsmikimecNessuna valutazione finora
- PRG - TP.JAK.1007 - Steam Jacketed Piping PDFDocumento21 paginePRG - TP.JAK.1007 - Steam Jacketed Piping PDFmikimecNessuna valutazione finora
- Aisc - Office BuildingsDocumento16 pagineAisc - Office Buildingsjoaquin_lazcanoNessuna valutazione finora
- Manual ETANK2000Documento73 pagineManual ETANK2000Ever BriceñoNessuna valutazione finora
- I Configure OverviewDocumento11 pagineI Configure OverviewMohd Firdaus Abd LatifNessuna valutazione finora
- Autodesk Navisworks Simulate 2012 - Manual Del UsuarioDocumento834 pagineAutodesk Navisworks Simulate 2012 - Manual Del UsuarioLeon HernandezNessuna valutazione finora
- Manual ETANK2000Documento73 pagineManual ETANK2000Ever BriceñoNessuna valutazione finora
- CADWorx Plant User GuideDocumento526 pagineCADWorx Plant User Guideivanmatijevic100% (8)
- Case Study Blackcat A4Documento1 paginaCase Study Blackcat A4mikimecNessuna valutazione finora
- Goulds Vertical ReaderDocumento20 pagineGoulds Vertical ReadergalindoalfonsoNessuna valutazione finora
- Autodesk Navisworks Simulate 2012 - Manual Del UsuarioDocumento834 pagineAutodesk Navisworks Simulate 2012 - Manual Del UsuarioLeon HernandezNessuna valutazione finora
- Autodesk Navisworks Simulate 2012 - Manual Del UsuarioDocumento834 pagineAutodesk Navisworks Simulate 2012 - Manual Del UsuarioLeon HernandezNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- German composer known for political worksDocumento4 pagineGerman composer known for political worksGeorge PikNessuna valutazione finora
- Web Search - One People's Public Trust 1776 UCCDocumento28 pagineWeb Search - One People's Public Trust 1776 UCCVincent J. CataldiNessuna valutazione finora
- HCF and LCMDocumento3 pagineHCF and LCMtamilanbaNessuna valutazione finora
- Bible Study RisksDocumento6 pagineBible Study RisksVincentNessuna valutazione finora
- Science & Technology: Wireless Sensor Network and Internet of Things (Iot) Solution in AgricultureDocumento10 pagineScience & Technology: Wireless Sensor Network and Internet of Things (Iot) Solution in AgricultureSivajith SNessuna valutazione finora
- Book Review Reclaim Your HeartDocumento7 pagineBook Review Reclaim Your HeartShaheer KhanNessuna valutazione finora
- 3B Adverbial PhrasesDocumento1 pagina3B Adverbial PhrasesSarah INessuna valutazione finora
- ISE I Conversation Task - Rules and RegulationsDocumento3 pagineISE I Conversation Task - Rules and RegulationsElena B. HerreroNessuna valutazione finora
- Medicalization of Racial Features Asian American Women and Cosmetic SurgeryDocumento17 pagineMedicalization of Racial Features Asian American Women and Cosmetic SurgeryMadalina ElenaNessuna valutazione finora
- Nitrate Reduction in Sulfate Reducing BacteriaDocumento10 pagineNitrate Reduction in Sulfate Reducing BacteriaCatalinaManjarresNessuna valutazione finora
- Source: Sonia S. Daquila. The Seeds of RevolutionDocumento6 pagineSource: Sonia S. Daquila. The Seeds of RevolutionJulliena BakersNessuna valutazione finora
- 2 - RUBRIC PHY110 (For Student)Documento3 pagine2 - RUBRIC PHY110 (For Student)Puteri AaliyyaNessuna valutazione finora
- Shear Explains Shear Cracks 45 DegDocumento15 pagineShear Explains Shear Cracks 45 DegHieu Huy NguyenNessuna valutazione finora
- Conic SectionDocumento58 pagineConic SectionNailah Sakinah100% (1)
- Logic Puzzles Freebie: Includes Instructions!Documento12 pagineLogic Puzzles Freebie: Includes Instructions!api-507836868Nessuna valutazione finora
- DRF1301 1000V 15A 30MHz MOSFET Push-Pull Hybrid DriverDocumento4 pagineDRF1301 1000V 15A 30MHz MOSFET Push-Pull Hybrid DriverAddy JayaNessuna valutazione finora
- Operations Management 2Documento15 pagineOperations Management 2karunakar vNessuna valutazione finora
- ViscosityDocumento7 pagineViscositykiran2381Nessuna valutazione finora
- 5 - Econ - Advanced Economic Theory (Eng)Documento1 pagina5 - Econ - Advanced Economic Theory (Eng)David JackNessuna valutazione finora
- New Democracy June-August 2017Documento32 pagineNew Democracy June-August 2017Communist Party of India - Marxist Leninist - New DemocracyNessuna valutazione finora
- Ad844 PDFDocumento20 pagineAd844 PDFkavi_mishra92Nessuna valutazione finora
- United States Court of Appeals, Sixth CircuitDocumento5 pagineUnited States Court of Appeals, Sixth CircuitScribd Government DocsNessuna valutazione finora
- Chapter 1. Introduction To TCPIP NetworkingDocumento15 pagineChapter 1. Introduction To TCPIP NetworkingPoojitha NagarajaNessuna valutazione finora
- G10 ICT Lesson1 - Types and Parts of ComputerDocumento4 pagineG10 ICT Lesson1 - Types and Parts of ComputerJOHN RIMMON TAQUISO0% (1)
- Neandertal Birth Canal Shape and The Evo PDFDocumento6 pagineNeandertal Birth Canal Shape and The Evo PDFashkenadaharsaNessuna valutazione finora
- Combined RubricsDocumento3 pagineCombined Rubricsapi-446053878Nessuna valutazione finora
- Urban Process Design - Hamid ShirvaniDocumento1 paginaUrban Process Design - Hamid ShirvaniCaramel LatteNessuna valutazione finora
- Mil HDBK 1390 PDFDocumento31 pagineMil HDBK 1390 PDFsleepanon4362Nessuna valutazione finora
- PHILIPPINE INCOME TAX REVIEWERDocumento99 paginePHILIPPINE INCOME TAX REVIEWERquedan_socotNessuna valutazione finora
- Onsemi ATX PSU DesignDocumento37 pagineOnsemi ATX PSU Designusuariojuan100% (1)