Potrebbero piacerti anche
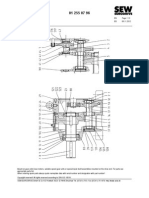
- Parts List 01 255 07 96: Helical Gear Unit R107Documento3 pagineParts List 01 255 07 96: Helical Gear Unit R107Parmasamy Subramani50% (2)
- A Project Report On DMRCDocumento22 pagineA Project Report On DMRCRahul Mehrotra100% (1)
- A Robust License-Plate Extraction Method Under Complex Image ConditionsDocumento4 pagineA Robust License-Plate Extraction Method Under Complex Image ConditionsJames Yu100% (1)
- Automatic Number Plate Recognition SystemDocumento10 pagineAutomatic Number Plate Recognition SystemsnehalNessuna valutazione finora
- Algorithm For License Plate Localization and Recognition For Tanzania Car Plate NumbersDocumento5 pagineAlgorithm For License Plate Localization and Recognition For Tanzania Car Plate NumbersIsack BuluguNessuna valutazione finora
- Car License Plate Recognition: Use Neutral NetworkDocumento8 pagineCar License Plate Recognition: Use Neutral NetworkCao VũNessuna valutazione finora
- V.kartHIKEYAN Published Article3Documento5 pagineV.kartHIKEYAN Published Article3karthikeyan.vNessuna valutazione finora
- CD Paper Pag 179Documento10 pagineCD Paper Pag 179Anonymous lEBdswQXmxNessuna valutazione finora
- PCB Exposure and Data Matrix Based Job Verification: Adam Marchewka, Ryszard Wocianiec, Jarosław ZdrojewskiDocumento8 paginePCB Exposure and Data Matrix Based Job Verification: Adam Marchewka, Ryszard Wocianiec, Jarosław ZdrojewskiShahrulJamalNessuna valutazione finora
- A Hybrid License Plate Extraction Method Based On Edge Statistics and MorphologyDocumento4 pagineA Hybrid License Plate Extraction Method Based On Edge Statistics and MorphologySathish KumarNessuna valutazione finora
- The Review On Automatic License Plate Recognition (Alpr)Documento6 pagineThe Review On Automatic License Plate Recognition (Alpr)esatjournalsNessuna valutazione finora
- A New Algorithm For Character Segmentation of License PlateDocumento4 pagineA New Algorithm For Character Segmentation of License PlateNguyễn Trung HưngNessuna valutazione finora
- Automated New License Plate Recognition in EgyptDocumento8 pagineAutomated New License Plate Recognition in EgyptAhmed GalalNessuna valutazione finora
- Smart Vehicle Screening System Using Artificial Intelligence MethodsDocumento8 pagineSmart Vehicle Screening System Using Artificial Intelligence MethodsHari HaranNessuna valutazione finora
- Anti-Personnel Mine Detection and Classification Using GPR ImageDocumento4 pagineAnti-Personnel Mine Detection and Classification Using GPR ImageBHANDIWADMADHUMITANessuna valutazione finora
- Color Object DetectionDocumento6 pagineColor Object DetectionEngr EbiNessuna valutazione finora
- Blind License Plate Detection: Max Guise Stephan GoupilleDocumento4 pagineBlind License Plate Detection: Max Guise Stephan GoupilleAnwar ZahroniNessuna valutazione finora
- Image Processing by Digital Filter Using MatlabDocumento7 pagineImage Processing by Digital Filter Using MatlabInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- An Effective Visualization and Analysis Method For Edge MeasurementDocumento10 pagineAn Effective Visualization and Analysis Method For Edge Measurementpraba_343Nessuna valutazione finora
- The Real Time Vechicle License Plate Identification System: P.Mohan Kumar, P.Kumaresan, Dr.S.A.K.JilaniDocumento5 pagineThe Real Time Vechicle License Plate Identification System: P.Mohan Kumar, P.Kumaresan, Dr.S.A.K.JilaniIJERDNessuna valutazione finora
- A New Method For License Plate Location Based On Top-Hat Transform and Wavelet Transform PDFDocumento4 pagineA New Method For License Plate Location Based On Top-Hat Transform and Wavelet Transform PDFBasilNessuna valutazione finora
- IJRET - The Automatic License Plate Recognition (Alpr)Documento7 pagineIJRET - The Automatic License Plate Recognition (Alpr)International Journal of Research in Engineering and TechnologyNessuna valutazione finora
- A Vision-Based Algorithm For Landing Unmanned Aerial VehiclesDocumento4 pagineA Vision-Based Algorithm For Landing Unmanned Aerial VehiclesSalman Ahmed KhanNessuna valutazione finora
- The Aliasing Problem in Computer-Generated Shaded ImagesDocumento7 pagineThe Aliasing Problem in Computer-Generated Shaded Imagesrodlima78Nessuna valutazione finora
- Blotch Detection and Removal For Archive Film Restoration: M. Kemal Gullu, Oguzhan Urhan, Sarp ErturkDocumento10 pagineBlotch Detection and Removal For Archive Film Restoration: M. Kemal Gullu, Oguzhan Urhan, Sarp ErturkJean Carlo MendesNessuna valutazione finora
- Ivs2006 2Documento8 pagineIvs2006 2Ricardo RomeroNessuna valutazione finora
- Vehicle Tire (Tyre) Detection and Text Recognition Using Deep LearningDocumento6 pagineVehicle Tire (Tyre) Detection and Text Recognition Using Deep LearningSolhost NiceNessuna valutazione finora
- Vehicle Speed Measurement and Number Plate Detection UsingDocumento10 pagineVehicle Speed Measurement and Number Plate Detection UsingM Yasir AnjumNessuna valutazione finora
- Original Paper: Corresponding Author Fax:+81-76-264-5613Documento6 pagineOriginal Paper: Corresponding Author Fax:+81-76-264-5613Gaurav SharmaNessuna valutazione finora
- A Real-Time Multiple-Vehicle Detection and Tracking System With Prior Occlusion Detection and ResolutionDocumento6 pagineA Real-Time Multiple-Vehicle Detection and Tracking System With Prior Occlusion Detection and ResolutionDaksha KalyanNessuna valutazione finora
- An e Cient Method of License Plate Location: Danian Zheng, Yannan Zhao, Jiaxin WangDocumento8 pagineAn e Cient Method of License Plate Location: Danian Zheng, Yannan Zhao, Jiaxin WangWilson Choque MoraNessuna valutazione finora
- Image Processing: Presented byDocumento15 pagineImage Processing: Presented byAyesha MeghaNessuna valutazione finora
- Kilari Veera Swamy B.Chandra Mohan Y.V.Bhaskar Reddy S.Srinivas KumarDocumento11 pagineKilari Veera Swamy B.Chandra Mohan Y.V.Bhaskar Reddy S.Srinivas KumarAmrit KaurNessuna valutazione finora
- Noncontact Roughness Measurement of Turned Parts Using Machine VisionDocumento10 pagineNoncontact Roughness Measurement of Turned Parts Using Machine VisionmayilsamythangarajuNessuna valutazione finora
- A Morphological-Based License Plate Location: Farhad Faradji, Amir Hossein Rezaie, Majid ZiaratbanDocumento4 pagineA Morphological-Based License Plate Location: Farhad Faradji, Amir Hossein Rezaie, Majid Ziaratbanapi-26400509Nessuna valutazione finora
- Resolution Adjustable 3D Scanner Based On Using Stereo CamerasDocumento5 pagineResolution Adjustable 3D Scanner Based On Using Stereo Camerasverze1Nessuna valutazione finora
- Development and Calibration of The Airborne Three-Line Scanner (TLS) Imaging SystemDocumento8 pagineDevelopment and Calibration of The Airborne Three-Line Scanner (TLS) Imaging SystemRatiu IonutNessuna valutazione finora
- The Automatic License Plate Recognition (Alpr)Documento7 pagineThe Automatic License Plate Recognition (Alpr)esatjournalsNessuna valutazione finora
- Paper 1Documento7 paginePaper 1Nishanthan KNessuna valutazione finora
- Edge Detection Sobel De2 AlteraDocumento4 pagineEdge Detection Sobel De2 AlteraParam UttarwarNessuna valutazione finora
- Two-Stage Segmentation For Detection of Suspicious Objects in Aerial and Long-Range Surveillance ApplicationsDocumento5 pagineTwo-Stage Segmentation For Detection of Suspicious Objects in Aerial and Long-Range Surveillance Applicationshrvoje80Nessuna valutazione finora
- Image ProcessDocumento6 pagineImage ProcessbeghinboseNessuna valutazione finora
- Mathematical Morphology Methodology For Extraction of Vehicle Number PlatesDocumento5 pagineMathematical Morphology Methodology For Extraction of Vehicle Number Platest_nkht2003Nessuna valutazione finora
- A Recognition System For 3D Embossed Digits On Non-Smooth Metallic SurfaceDocumento6 pagineA Recognition System For 3D Embossed Digits On Non-Smooth Metallic SurfaceselimolojiNessuna valutazione finora
- Image Forgery Detection Based On Quantization Table EstimationDocumento4 pagineImage Forgery Detection Based On Quantization Table EstimationKhaled MaNessuna valutazione finora
- University of Zawia Faculty of Engineering: Performance of Different Transforms On Image ContourDocumento51 pagineUniversity of Zawia Faculty of Engineering: Performance of Different Transforms On Image ContourAhmed HwaidiNessuna valutazione finora
- Abstract AnprDocumento11 pagineAbstract AnprHemal VyasNessuna valutazione finora
- Real Time Image Processing Applied To Traffic Queue DDocumento12 pagineReal Time Image Processing Applied To Traffic Queue Dshajin2233Nessuna valutazione finora
- An Efficient System For Automatic Sorting of The Ceramic TilesDocumento3 pagineAn Efficient System For Automatic Sorting of The Ceramic TilesMekaTronNessuna valutazione finora
- Calibration Using GaDocumento6 pagineCalibration Using GaDinesh KumarNessuna valutazione finora
- Ankit Final RMP ReportDocumento3 pagineAnkit Final RMP ReportSandeepRajNessuna valutazione finora
- Multi-Source Image Registration Based On Log-Polar Coordinates and Extension Phase Correlation PDFDocumento7 pagineMulti-Source Image Registration Based On Log-Polar Coordinates and Extension Phase Correlation PDFivy_publisherNessuna valutazione finora
- Reconstruction of Mechanically Recorded Sound by Image ProcessingDocumento21 pagineReconstruction of Mechanically Recorded Sound by Image ProcessingGaddipati GayathriNessuna valutazione finora
- TMCE08 Ind Env Rev EngDocumento14 pagineTMCE08 Ind Env Rev EngAnonymous zwSP5gvNessuna valutazione finora
- Real Time Image Processing Applied To Traffic Queue Detection AlgorithmDocumento17 pagineReal Time Image Processing Applied To Traffic Queue Detection Algorithmshajin2233Nessuna valutazione finora
- Orthorectification of Satellite Images Using External Dems From IfsarDocumento6 pagineOrthorectification of Satellite Images Using External Dems From IfsarNugra PutraNessuna valutazione finora
- Real-Time Stereo Vision For Urban Traffic Scene UnderstandingDocumento6 pagineReal-Time Stereo Vision For Urban Traffic Scene UnderstandingBasilNessuna valutazione finora
- The Review On Automatic License Plate RecognitionDocumento6 pagineThe Review On Automatic License Plate RecognitionInternational Journal of Research in Engineering and TechnologyNessuna valutazione finora
- Digital Image ProcessingDocumento14 pagineDigital Image Processingnirankari_satishNessuna valutazione finora
- Human Motion Detection and Video Surveillance Using MATLAB: Sapana K. Mishra, Kanchan .S BhagatDocumento4 pagineHuman Motion Detection and Video Surveillance Using MATLAB: Sapana K. Mishra, Kanchan .S BhagatRazvanHaragNessuna valutazione finora
- Real-Time Surface Defects Inspection of Steel Strip Based On Difference ImageDocumento9 pagineReal-Time Surface Defects Inspection of Steel Strip Based On Difference Imagepgandikota3424Nessuna valutazione finora
- Computer Processing of Remotely-Sensed Images: An IntroductionDa EverandComputer Processing of Remotely-Sensed Images: An IntroductionNessuna valutazione finora
- Hatch Cover Maintenance PlanDocumento5 pagineHatch Cover Maintenance Planvinay3972Nessuna valutazione finora
- Unit I - Shafts: Single ElementDocumento7 pagineUnit I - Shafts: Single Elementchelam101100% (1)
- UnLock Root Pro 4.1.1Documento9 pagineUnLock Root Pro 4.1.1jackcarver11Nessuna valutazione finora
- Lampiran BDocumento3 pagineLampiran BIqbhal WanaharaNessuna valutazione finora
- Know The Escalation Matrix To ReportDocumento1 paginaKnow The Escalation Matrix To ReportHemal GandhiNessuna valutazione finora
- Technical Proposal: Genale Dawa-6 Hydroelectric Power ProjectDocumento336 pagineTechnical Proposal: Genale Dawa-6 Hydroelectric Power ProjectEyob AdNessuna valutazione finora
- LogDocumento2 pagineLogFerdian SumbaNessuna valutazione finora
- 15 Oil Fired Crucible FurnaceDocumento2 pagine15 Oil Fired Crucible Furnaceudaya kumarNessuna valutazione finora
- As / SG Gs / Ghe Dimensions For Couplings (Standard) Bore With Keyway According To DIN 6885 T1Documento1 paginaAs / SG Gs / Ghe Dimensions For Couplings (Standard) Bore With Keyway According To DIN 6885 T1hadeNessuna valutazione finora
- Rubric For Case StudyDocumento1 paginaRubric For Case StudyCj NavarroNessuna valutazione finora
- Tadano Multiplex Data Transmitter MDT 8 Service ManualDocumento10 pagineTadano Multiplex Data Transmitter MDT 8 Service Manualsherman100% (48)
- TechTrax 09 2003 ScreenReaderVersionDocumento84 pagineTechTrax 09 2003 ScreenReaderVersionMCKINNONBNessuna valutazione finora
- Mca Voice Morphing ReportDocumento4 pagineMca Voice Morphing Reportmango sravanreddyNessuna valutazione finora
- 2 - Way Ball ValvesDocumento6 pagine2 - Way Ball ValvesFitra VertikalNessuna valutazione finora
- Um0244 01 GBDocumento84 pagineUm0244 01 GBnetharafernando1Nessuna valutazione finora
- Programming in C++ For BCA BIT BE PDFDocumento129 pagineProgramming in C++ For BCA BIT BE PDFRajan BagaleNessuna valutazione finora
- 2.0 Intro To Small Basic GraphicsDocumento18 pagine2.0 Intro To Small Basic GraphicspatoturboNessuna valutazione finora
- ' ' Shail Ahmad: Privet of India Acres N Inches List of ClientDocumento3 pagine' ' Shail Ahmad: Privet of India Acres N Inches List of Clientapi-243316402Nessuna valutazione finora
- Vocational Training Report 3Documento37 pagineVocational Training Report 3Suraj sahuNessuna valutazione finora
- 3600 2 TX All Rounder Rotary Brochure India enDocumento2 pagine3600 2 TX All Rounder Rotary Brochure India ensaravananknpcNessuna valutazione finora
- Homework 1Documento3 pagineHomework 1Bukhosi MsimangaNessuna valutazione finora
- Masonry - Block Joint Mortar 15bDocumento1 paginaMasonry - Block Joint Mortar 15bmanish260320Nessuna valutazione finora
- HSC Chemistry SkillsDocumento9 pagineHSC Chemistry SkillsMartin KarlowNessuna valutazione finora
- MK7850NDocumento6 pagineMK7850NkherrimanNessuna valutazione finora
- SAP MM Module OverviewDocumento15 pagineSAP MM Module OverviewAmit Kumar100% (1)
- ToshibaDocumento316 pagineToshibaRitesh SharmaNessuna valutazione finora
- PAC4200 Product GuideDocumento4 paginePAC4200 Product GuideHugo Alberto Malespin SolisNessuna valutazione finora
- Physics 2Documento2 paginePhysics 2MarcusKlahnTokoeJr.Nessuna valutazione finora