Potrebbero piacerti anche
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentDa EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentNessuna valutazione finora
- Spring MVC FormDocumento8 pagineSpring MVC Formsbt8oq3Nessuna valutazione finora
- Radio Control for Model Ships, Boats and AircraftDa EverandRadio Control for Model Ships, Boats and AircraftValutazione: 5 su 5 stelle5/5 (1)
- Synopsis QuadcopterDocumento10 pagineSynopsis QuadcopterNamithaMahaleNessuna valutazione finora
- EFTA2005Documento7 pagineEFTA2005Pablo TaboadaNessuna valutazione finora
- Characterization of Actuators, Sensors and Wireless System For Autonomous Tethered Hover of A Mini-HelicopterDocumento2 pagineCharacterization of Actuators, Sensors and Wireless System For Autonomous Tethered Hover of A Mini-Helicopterdebanik13498Nessuna valutazione finora
- ETA Floor Mounted PKG UnitDocumento16 pagineETA Floor Mounted PKG UnitbhaveshbhoiNessuna valutazione finora
- C1 Introduction To Power EngineeringDocumento15 pagineC1 Introduction To Power EngineeringVirgilMaroNessuna valutazione finora
- I. II. Preface Iii. List of Figures IV. List of Tables Page No. 1 Introduction 1Documento7 pagineI. II. Preface Iii. List of Figures IV. List of Tables Page No. 1 Introduction 1anon_238031053Nessuna valutazione finora
- IPcamera Usermanual EnglishDocumento39 pagineIPcamera Usermanual EnglishGunter FerreiraNessuna valutazione finora
- Pspice Tutorial Discusses Text-Based Pspice EntryDocumento5 paginePspice Tutorial Discusses Text-Based Pspice EntryRobertDumitruNessuna valutazione finora
- Marine Engineering System IntroductionDocumento114 pagineMarine Engineering System Introductionsuvabrata_das01100% (12)
- Remote Indication Systems PDFDocumento27 pagineRemote Indication Systems PDFMichael MitchellNessuna valutazione finora
- Sciencedirect: Design and Implementation of Stable Pid Controller For Interacting Level Control SystemDocumento10 pagineSciencedirect: Design and Implementation of Stable Pid Controller For Interacting Level Control SystemJuan CamiloNessuna valutazione finora
- Electrical Technical Officer PDFDocumento35 pagineElectrical Technical Officer PDFRinson RajNessuna valutazione finora
- Sports and Building AerodynamicsDocumento13 pagineSports and Building AerodynamicsMaria Cielo VarelaNessuna valutazione finora
- Energies: Small Wind Turbine Emulator Based On Lambda-Cp Curves Obtained Under Real Operating ConditionsDocumento17 pagineEnergies: Small Wind Turbine Emulator Based On Lambda-Cp Curves Obtained Under Real Operating ConditionsAnant MilanNessuna valutazione finora
- UMTS Network Post Luanch Optimization and Evolution TrainingDocumento170 pagineUMTS Network Post Luanch Optimization and Evolution TrainingFouzan SaeedNessuna valutazione finora
- Cplus Steepds CPPDocumento3 pagineCplus Steepds CPPshyamNessuna valutazione finora
- Code Script Arduino Sensor LCDDocumento5 pagineCode Script Arduino Sensor LCDNicko RizqienggalNessuna valutazione finora
- 004-Fligh System Implementation in A UAVDocumento51 pagine004-Fligh System Implementation in A UAVAria IraniNessuna valutazione finora
- Safety Check ListDocumento12 pagineSafety Check ListAdriana EscobarNessuna valutazione finora
- Aircraft Design Practice Unit-I: Requirements From The UserDocumento12 pagineAircraft Design Practice Unit-I: Requirements From The UserVarshini KamarajNessuna valutazione finora
- Aero 3 - 8 Anna's SyllabusDocumento110 pagineAero 3 - 8 Anna's SyllabusShiva UNessuna valutazione finora
- Matching A Centrifugal Fan To A Chosen Model SizeDocumento5 pagineMatching A Centrifugal Fan To A Chosen Model SizelesteradimNessuna valutazione finora
- SIStec Major Project Report On GSM Based Pump Control SystemDocumento81 pagineSIStec Major Project Report On GSM Based Pump Control Systemukpandey25Nessuna valutazione finora
- Cell Planning OverviewDocumento57 pagineCell Planning OverviewMagnifiko MagmerNessuna valutazione finora
- CAP Functional SpecificationDocumento44 pagineCAP Functional SpecificationralagarsanNessuna valutazione finora
- Wago - Acspl Marine Approved ControlsDocumento24 pagineWago - Acspl Marine Approved ControlsPAUL100% (1)
- Wind Tunnel Testing of A VTOL MAV Propeller in Tilted Operating ModeDocumento10 pagineWind Tunnel Testing of A VTOL MAV Propeller in Tilted Operating ModeM Ilman NuryakusumahNessuna valutazione finora
- Vodafone Training Report 2011 ON GSM, GPRS: Robin Rajan 08EAIAI051 4 Year APE AietDocumento82 pagineVodafone Training Report 2011 ON GSM, GPRS: Robin Rajan 08EAIAI051 4 Year APE AietyogiyaNessuna valutazione finora
- Aircraft Maintenance (Avionics)Documento32 pagineAircraft Maintenance (Avionics)Abed Almajeed AlowioiNessuna valutazione finora
- Airport Authority of IndiaDocumento50 pagineAirport Authority of IndiaKuldeep GuptaNessuna valutazione finora
- Monitor and Control OfGreenhouse Environment-GreenBeeDocumento298 pagineMonitor and Control OfGreenhouse Environment-GreenBeetariq76Nessuna valutazione finora
- Full Design of A Low-Cost Quadrotor UAV by Student TeamDocumento7 pagineFull Design of A Low-Cost Quadrotor UAV by Student TeamTeh Boon SiangNessuna valutazione finora
- Cost-Benefit Evaluation of Remote Inspection of Offshore Wind Farms...Documento9 pagineCost-Benefit Evaluation of Remote Inspection of Offshore Wind Farms...claudioNessuna valutazione finora
- E3sconf Enos2018 00012Documento8 pagineE3sconf Enos2018 00012Alexander CasallasNessuna valutazione finora
- D41 Safety Maintenance LogbookDocumento35 pagineD41 Safety Maintenance LogbookjoreyvilNessuna valutazione finora
- Visually Coupled Systems - Air University Review - March-April 1974, Vol25 No3Documento14 pagineVisually Coupled Systems - Air University Review - March-April 1974, Vol25 No3Erdo StimpyNessuna valutazione finora
- 3 DOF Helicopter Courseware Sample For MATLAB UsersDocumento9 pagine3 DOF Helicopter Courseware Sample For MATLAB UsersdptirkeyNessuna valutazione finora
- Aeronautical Engineering 4th YearDocumento19 pagineAeronautical Engineering 4th YearMuskan RawatNessuna valutazione finora
- Quad Research ProposalDocumento5 pagineQuad Research ProposalRichard HannahNessuna valutazione finora
- The Locomotive State Monitoring and Supervise System Based On GpsDocumento5 pagineThe Locomotive State Monitoring and Supervise System Based On GpsabhinavkarthickNessuna valutazione finora
- Para QuedasDocumento28 paginePara QuedasFlaviano SamelNessuna valutazione finora
- Appl GIPCLDocumento4 pagineAppl GIPCLabdulyunus_amirNessuna valutazione finora
- AEROMAG LAKOTA Dealer Brochure Wind TurbinesDocumento4 pagineAEROMAG LAKOTA Dealer Brochure Wind TurbinesAldana OrleneNessuna valutazione finora
- Audit of Major Bands: Annex BDocumento27 pagineAudit of Major Bands: Annex BSamar SamerNessuna valutazione finora
- Activity Based Costing and Cost Management SystemsDocumento11 pagineActivity Based Costing and Cost Management SystemsYuki TakenoNessuna valutazione finora
- A ON Design Aspects of Electrical System IN Typical 700 MW e Indian Atomic Power ProjectDocumento27 pagineA ON Design Aspects of Electrical System IN Typical 700 MW e Indian Atomic Power Projecttggarg9Nessuna valutazione finora
- Optimization of Multi-Element AirfoilsDocumento75 pagineOptimization of Multi-Element Airfoilsdavo87Nessuna valutazione finora
- Procedure: Introduction To SIMULINK AM Modulation and DemodulationDocumento15 pagineProcedure: Introduction To SIMULINK AM Modulation and DemodulationAndrew JonesNessuna valutazione finora
- QUANSER-3DOFHelicopter Reference ManualDocumento38 pagineQUANSER-3DOFHelicopter Reference Manualkieranwood857015Nessuna valutazione finora
- EE3 Laboratory Manual V1.8a - PDFCreator Soft FontsDocumento122 pagineEE3 Laboratory Manual V1.8a - PDFCreator Soft FontsWeiwei ZhaoNessuna valutazione finora
- AtlantikSolar ICRA 2015 VFinalDocumento8 pagineAtlantikSolar ICRA 2015 VFinalشعاع الخيرNessuna valutazione finora
- Een Oen 498 - Pre ProposalDocumento14 pagineEen Oen 498 - Pre Proposalapi-296881750Nessuna valutazione finora
- Spacecraft Description Boilerplate 13Documento144 pagineSpacecraft Description Boilerplate 13jackie_fisher_email8329100% (1)
- Distillation Column Design MulticomponentDocumento23 pagineDistillation Column Design Multicomponentsuleman205100% (1)
- Ngo M ĐKTX Dong Hae 10m3Documento42 pagineNgo M ĐKTX Dong Hae 10m3Nam ĐặngNessuna valutazione finora
- Planning It ParkDocumento79 paginePlanning It ParkHamed Raza67% (3)
- Eng DS Epp-2314 1410Documento2 pagineEng DS Epp-2314 1410MarkusAldoMaquNessuna valutazione finora
- Dual Op Amp and Voltage Reference Ap4310/ADocumento12 pagineDual Op Amp and Voltage Reference Ap4310/AМихаил ЯненкоNessuna valutazione finora
- Fundamentals of Pain Medicine: Jianguo Cheng Richard W. RosenquistDocumento346 pagineFundamentals of Pain Medicine: Jianguo Cheng Richard W. RosenquistMayNessuna valutazione finora
- CheckList For Checking of Drawings-R1Documento4 pagineCheckList For Checking of Drawings-R1jatin kalraNessuna valutazione finora
- Bible World History Timeline - 4004-3004BCDocumento1 paginaBible World History Timeline - 4004-3004BCSagitonette DadapNessuna valutazione finora
- PEH Q3 Long QuizDocumento1 paginaPEH Q3 Long QuizBenedict LumagueNessuna valutazione finora
- Oil Whirl and Whip Instabilities - Within Journal BearingsDocumento27 pagineOil Whirl and Whip Instabilities - Within Journal BearingsTalha AamirNessuna valutazione finora
- Percent by VolumeDocumento19 paginePercent by VolumeSabrina LavegaNessuna valutazione finora
- Mockery Breed Murder Birds PDFDocumento12 pagineMockery Breed Murder Birds PDFLautaro BojanichNessuna valutazione finora
- 12/1/2014 Powder MetallurgyDocumento29 pagine12/1/2014 Powder Metallurgysofyan sam0% (2)
- Lesson 1 Chapter 9 ErosiondepositionDocumento1 paginaLesson 1 Chapter 9 Erosiondepositionapi-249320969Nessuna valutazione finora
- The Light Fantastic by Sarah CombsDocumento34 pagineThe Light Fantastic by Sarah CombsCandlewick PressNessuna valutazione finora
- 18 Ray Optics Revision Notes QuizrrDocumento108 pagine18 Ray Optics Revision Notes Quizrraafaf.sdfddfaNessuna valutazione finora
- Table Equivalent Schedule 40 Steel PipeDocumento1 paginaTable Equivalent Schedule 40 Steel PipeorisNessuna valutazione finora
- Midterm Exam Gor Grade 11Documento2 pagineMidterm Exam Gor Grade 11Algelle AbrantesNessuna valutazione finora
- IV. Network Modeling, Simple SystemDocumento16 pagineIV. Network Modeling, Simple SystemJaya BayuNessuna valutazione finora
- Middle Range Theory Ellen D. Schulzt: Modeling and Role Modeling Katharine Kolcaba: Comfort TheoryDocumento22 pagineMiddle Range Theory Ellen D. Schulzt: Modeling and Role Modeling Katharine Kolcaba: Comfort TheoryMerlinNessuna valutazione finora
- Catalogo GatesDocumento255 pagineCatalogo GatesBenjamin HedoneweNessuna valutazione finora
- 2015 Nos-Dcp National Oil Spill Disaster Contingency PlanDocumento62 pagine2015 Nos-Dcp National Oil Spill Disaster Contingency PlanVaishnavi Jayakumar100% (1)
- 1970 - Transformer FMEA PDFDocumento7 pagine1970 - Transformer FMEA PDFSing Yew Lam0% (1)
- Material Specification - 077154C-000-JSS-1700-009 - DDocumento13 pagineMaterial Specification - 077154C-000-JSS-1700-009 - DStructures ProductionNessuna valutazione finora
- Toshiba: ® A20SeriesDocumento12 pagineToshiba: ® A20SeriesYangNessuna valutazione finora
- Catalogo Aesculap PDFDocumento16 pagineCatalogo Aesculap PDFHansNessuna valutazione finora
- Assignment Booklet July 2021Documento22 pagineAssignment Booklet July 2021Saksham TiwariNessuna valutazione finora
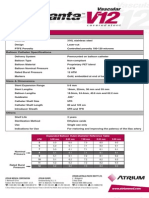
- Advanta V12 Data SheetDocumento2 pagineAdvanta V12 Data SheetJuliana MiyagiNessuna valutazione finora
- Bảng giá FLUKEDocumento18 pagineBảng giá FLUKEVăn Long NguyênNessuna valutazione finora
- Piriformis Syndrome: Hardi Adiyatma, Shahdevi Nandar KusumaDocumento6 paginePiriformis Syndrome: Hardi Adiyatma, Shahdevi Nandar Kusumaismael wandikboNessuna valutazione finora
- Cost Analysis - Giberson Art GlassDocumento3 pagineCost Analysis - Giberson Art GlassSessy Saly50% (2)
- LG250CDocumento2 pagineLG250CCarlosNessuna valutazione finora
- 300 PSI CTS (MP-1115) Operation Manual Rev1.3Documento18 pagine300 PSI CTS (MP-1115) Operation Manual Rev1.3Juan Manuel VizosoNessuna valutazione finora