Potrebbero piacerti anche
- IC Validator User Guide: Version K-2015.06, June 2015Documento15 pagineIC Validator User Guide: Version K-2015.06, June 2015Deepak Kumar S Nadiger100% (1)
- LED Running Lights ExperimentDocumento9 pagineLED Running Lights ExperimentElimar C JaymeNessuna valutazione finora
- Cpe - Eee241-Dld Lab ManualDocumento117 pagineCpe - Eee241-Dld Lab ManualmbaNessuna valutazione finora
- Expt-5 Lab Manual TE LabDocumento10 pagineExpt-5 Lab Manual TE LabRuham RofiqueNessuna valutazione finora
- Exercise 6 (Chapter 6: Video) : C. NTSC - JapanDocumento2 pagineExercise 6 (Chapter 6: Video) : C. NTSC - JapanNurul Aini Mohd ZamriNessuna valutazione finora
- Microcontroller Lab ManualDocumento54 pagineMicrocontroller Lab Manualtjdandin1Nessuna valutazione finora
- MC Lab - EXP2Documento3 pagineMC Lab - EXP2Mohammad SamheelNessuna valutazione finora
- 8051-Manual 2011Documento95 pagine8051-Manual 2011Deepak JanardhananNessuna valutazione finora
- Lab Manual Network SecurityDocumento34 pagineLab Manual Network SecurityGauravDuhoonNessuna valutazione finora
- 354 33 Powerpoint-Slides CH8Documento43 pagine354 33 Powerpoint-Slides CH8Saravanan JayabalanNessuna valutazione finora
- Embedded Processors and Memory: Version 2 EE IIT, Kharagpur 1Documento9 pagineEmbedded Processors and Memory: Version 2 EE IIT, Kharagpur 1ahamed100% (7)
- Embedded Communications: Version 2 EE IIT, Kharagpur 1Documento15 pagineEmbedded Communications: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Embedded Systems LabDocumento60 pagineEmbedded Systems LabKishore Cherala100% (2)
- Lab 8 (1) IotDocumento12 pagineLab 8 (1) IotNAUTASH KHAN100% (1)
- Embedded Systems Embedded Processors-1Documento7 pagineEmbedded Systems Embedded Processors-1Puspala ManojkumarNessuna valutazione finora
- Introduction To Embedded Systems by Edward AshfordDocumento294 pagineIntroduction To Embedded Systems by Edward Ashfordkarim94Nessuna valutazione finora
- Introduction To Engineering Study: Aiub Dr. M. Tanseer Ali Intro - Eng - Study Lec 1 /1Documento22 pagineIntroduction To Engineering Study: Aiub Dr. M. Tanseer Ali Intro - Eng - Study Lec 1 /1Khabir HosaainNessuna valutazione finora
- 8051 Instruction SetDocumento26 pagine8051 Instruction SetgarimaguptaNessuna valutazione finora
- 8051 Instruction SetDocumento50 pagine8051 Instruction Setkapil singhNessuna valutazione finora
- Computer Architecture Lab ManualDocumento108 pagineComputer Architecture Lab ManualRafi UllahNessuna valutazione finora
- Microcontroller & ProcessorDocumento10 pagineMicrocontroller & ProcessorVishalMehtaNessuna valutazione finora
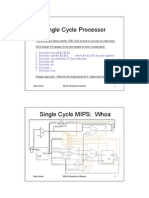
- EE361 SingleMIPSDocumento19 pagineEE361 SingleMIPSThùyVũNessuna valutazione finora
- Exp 8 (DLD)Documento4 pagineExp 8 (DLD)shah hassaanNessuna valutazione finora
- Interfacing Relay With 8051Documento6 pagineInterfacing Relay With 8051Pantech ProLabs India Pvt Ltd100% (2)
- CHAPTER 1 (Engineering Profession)Documento33 pagineCHAPTER 1 (Engineering Profession)Mohd Luqmanul HakimNessuna valutazione finora
- CN Lab Manual 2018 19Documento81 pagineCN Lab Manual 2018 19Aditya KumarNessuna valutazione finora
- Interfacing Switch and Led With 8051Documento6 pagineInterfacing Switch and Led With 8051Pantech ProLabs India Pvt LtdNessuna valutazione finora
- User Manual - MultiFunction PDFDocumento163 pagineUser Manual - MultiFunction PDFshalynNessuna valutazione finora
- CS6711 Security Lab Manual PDFDocumento83 pagineCS6711 Security Lab Manual PDFelanthiraiyan elanthiraiyanNessuna valutazione finora
- 8051 Serial Port ProgrammingDocumento29 pagine8051 Serial Port ProgrammingKiran bobyNessuna valutazione finora
- Lab 2 - Introduction To Arduino & Its CodingDocumento7 pagineLab 2 - Introduction To Arduino & Its CodingSaif UllahNessuna valutazione finora
- 01 Intro To EngineeringDocumento36 pagine01 Intro To EngineeringAi niNessuna valutazione finora
- Lab 3 Combinational Logic Design (Canonical Form)Documento3 pagineLab 3 Combinational Logic Design (Canonical Form)Ifthakharul Alam ShuvoNessuna valutazione finora
- Computer Laboratory Manual: Fundamental of ICT Lab ManualDocumento133 pagineComputer Laboratory Manual: Fundamental of ICT Lab Manualanon_510855877Nessuna valutazione finora
- 6 - Cyber Physical Systems PDFDocumento21 pagine6 - Cyber Physical Systems PDFNIKHIL ARORANessuna valutazione finora
- 354 33 Powerpoint-Slides CH18Documento21 pagine354 33 Powerpoint-Slides CH18Saravanan JayabalanNessuna valutazione finora
- Interfacing DC Motor To 8051 Microcontroller Using AT89S51Documento4 pagineInterfacing DC Motor To 8051 Microcontroller Using AT89S51Pranjal MethiNessuna valutazione finora
- Cryptography and Network Security Lab ManualDocumento96 pagineCryptography and Network Security Lab ManualDecade WsomNessuna valutazione finora
- Csc261 CCN Lab ManualDocumento125 pagineCsc261 CCN Lab ManualasadhppyNessuna valutazione finora
- Lab 4 Combinational Logic Design (K Maps)Documento6 pagineLab 4 Combinational Logic Design (K Maps)Ifthakharul Alam ShuvoNessuna valutazione finora
- ITWS Lab ManualDocumento119 pagineITWS Lab ManualSENTHIL RNessuna valutazione finora
- MP Lab ManualDocumento54 pagineMP Lab Manualsateesh180siri0% (2)
- Computer Network Lab ManualDocumento43 pagineComputer Network Lab ManualktpcoeoNessuna valutazione finora
- 354 33 Powerpoint-Slides CH9Documento44 pagine354 33 Powerpoint-Slides CH9Saravanan JayabalanNessuna valutazione finora
- CN Lab FileDocumento22 pagineCN Lab FileaditiNessuna valutazione finora
- CS 403-Week 1 ModuleDocumento24 pagineCS 403-Week 1 ModuleJudielyn CualbarNessuna valutazione finora
- 1.4.1.1 Lab - Researching Network Attacks and Security Audit ToolsDocumento4 pagine1.4.1.1 Lab - Researching Network Attacks and Security Audit Toolsmerz asmaNessuna valutazione finora
- Alter A de 1 Board AssignmentDocumento66 pagineAlter A de 1 Board Assignmentdipin555Nessuna valutazione finora
- 3.1.2.7 Lab Getting Familiar With The Linux Shell ILMDocumento9 pagine3.1.2.7 Lab Getting Familiar With The Linux Shell ILMjuancho naravalNessuna valutazione finora
- DLD Lab Manual 01Documento6 pagineDLD Lab Manual 01Sana gullNessuna valutazione finora
- Logic Synthesis at MITDocumento8 pagineLogic Synthesis at MITkumarguptav91Nessuna valutazione finora
- 8051 Microcontroller Hardware Interfacing Tutorials - Basic Circuit For 8051Documento4 pagine8051 Microcontroller Hardware Interfacing Tutorials - Basic Circuit For 8051Lakshmanan SivalingamNessuna valutazione finora
- HDL Simulation Lab ManualDocumento129 pagineHDL Simulation Lab ManualNavdeep GuptaNessuna valutazione finora
- Laws Affecting All Forms of MassDocumento12 pagineLaws Affecting All Forms of MassIsing Arcynill PundoNessuna valutazione finora
- Database ManagementDocumento259 pagineDatabase ManagementKoh Hong Wei100% (1)
- Griet-M.tech-Embedded Systems - Microcontrollers Lab Manual 2018-19 PDFDocumento178 pagineGriet-M.tech-Embedded Systems - Microcontrollers Lab Manual 2018-19 PDFAnonymous P40JqxuSKNessuna valutazione finora
- Empirical Research Methods For Software EngineeringDocumento24 pagineEmpirical Research Methods For Software EngineeringsarfraznawazbrohiNessuna valutazione finora
- Computer Network 1Documento17 pagineComputer Network 1Surendra Singh ChauhanNessuna valutazione finora
- Manual Lab Sheet: MCP ProgramsDocumento20 pagineManual Lab Sheet: MCP Programssiri.pogulaNessuna valutazione finora
- Module 3Documento14 pagineModule 3Rohit AnejaNessuna valutazione finora
- MICRO CONTROLLER LAB ManualDocumento33 pagineMICRO CONTROLLER LAB ManualSrikanth ImmaReddyNessuna valutazione finora
- Lab 3: Giao Tiếp Lcd Và AdcDocumento14 pagineLab 3: Giao Tiếp Lcd Và AdcNgô KiệtNessuna valutazione finora
- Transfer 5 Bytes of Data From One Location To Another 8051Documento7 pagineTransfer 5 Bytes of Data From One Location To Another 805112121112Nessuna valutazione finora
- NotesDocumento136 pagineNotesthorz123Nessuna valutazione finora
- Fieldtheory Compiled BasvarajDocumento37 pagineFieldtheory Compiled BasvarajKarthikeyan RamalingamNessuna valutazione finora
- Chapter 1 Circuit Concepts and Network Specification TechniquesDocumento110 pagineChapter 1 Circuit Concepts and Network Specification TechniquesKarthikeyan RamalingamNessuna valutazione finora
- Semimicroqualita 029198 MBPDocumento147 pagineSemimicroqualita 029198 MBPKarthikeyan RamalingamNessuna valutazione finora
- Novel Three-Phase Multilevel Inverter With Reduced Components For Low-And High-Voltage ApplicationsDocumento10 pagineNovel Three-Phase Multilevel Inverter With Reduced Components For Low-And High-Voltage ApplicationsLawiii KkkNessuna valutazione finora
- Pushing and PullingDocumento5 paginePushing and PullingAsutosh AcharyaNessuna valutazione finora
- 85005-0133 - EST3X Life Safety Control SystemDocumento10 pagine85005-0133 - EST3X Life Safety Control SystemOctavio CortesNessuna valutazione finora
- Ja 63FDocumento1 paginaJa 63FAndy ColeNessuna valutazione finora
- BSR100D BSRU100D: The Optimal Radio Modem Transceiver For Telemetry ApplicationsDocumento2 pagineBSR100D BSRU100D: The Optimal Radio Modem Transceiver For Telemetry ApplicationsCarlos Enrique Huertas FigueroaNessuna valutazione finora
- 1290Mhz Beam Antenna Dj9ywDocumento5 pagine1290Mhz Beam Antenna Dj9ywMarco TesolinNessuna valutazione finora
- Riscv SpecDocumento236 pagineRiscv SpecAshwini PatilNessuna valutazione finora
- REX Ovuv AccuracyDocumento454 pagineREX Ovuv AccuracyngocanhvyNessuna valutazione finora
- JSSC 1968 1049925Documento9 pagineJSSC 1968 1049925GowthamNessuna valutazione finora
- Gate Drive Design For Large Mosfet Apt9302Documento10 pagineGate Drive Design For Large Mosfet Apt9302Grzegorz WegnerNessuna valutazione finora
- LM 317Documento31 pagineLM 317Ramiro MezaNessuna valutazione finora
- Understanding Modern Power MOSFETsDocumento36 pagineUnderstanding Modern Power MOSFETsZhao XuNessuna valutazione finora
- Survival Craft VHF 2Documento7 pagineSurvival Craft VHF 2Kunal SinghNessuna valutazione finora
- ECE3041 - Biomedical Instrumentation and Measurements TASK-2Documento3 pagineECE3041 - Biomedical Instrumentation and Measurements TASK-2Manasi NaradeNessuna valutazione finora
- 0 - 2015 ITRS 2.0 Executive Report PDFDocumento79 pagine0 - 2015 ITRS 2.0 Executive Report PDFAditya SarathyNessuna valutazione finora
- Ds Esprimo q920Documento8 pagineDs Esprimo q920conmar5mNessuna valutazione finora
- Communication SystemsDocumento4 pagineCommunication SystemsMT๛ LUCIFERNessuna valutazione finora
- Logcira114 Lab Experiment # 1 - Digital Logic GatesDocumento6 pagineLogcira114 Lab Experiment # 1 - Digital Logic GatesLouieMurioNessuna valutazione finora
- Egat-Gridcode-Connection 62Documento1 paginaEgat-Gridcode-Connection 62Ekanit ChuaykoedNessuna valutazione finora
- LTE ParametersDocumento388 pagineLTE ParametersAamir Riaz MalikNessuna valutazione finora
- RS485 White PaperDocumento8 pagineRS485 White PaperReinaldo SouzaNessuna valutazione finora
- Arduino CNC Controller For ESTLCAMDocumento10 pagineArduino CNC Controller For ESTLCAMglamuraNessuna valutazione finora
- Unit 5Documento11 pagineUnit 5RajaNessuna valutazione finora
- Hytera RD98X (S) : Respond & AchieveDocumento27 pagineHytera RD98X (S) : Respond & AchieveRaed YounisNessuna valutazione finora
- Datasheet Fba3 Force Balance Accelerometer KinemetricsDocumento2 pagineDatasheet Fba3 Force Balance Accelerometer KinemetricssimonjmorNessuna valutazione finora
- PH CONTROL IN A BIOREACTOR PDFDocumento45 paginePH CONTROL IN A BIOREACTOR PDFrijilpoothadiNessuna valutazione finora
- Augmented Spark Gap Igniter For Propellants: Descr Mouser Part NumberDocumento3 pagineAugmented Spark Gap Igniter For Propellants: Descr Mouser Part NumberFrançois LeroyNessuna valutazione finora