Potrebbero piacerti anche
- Avionica y Sistemas de NavegaciónDocumento39 pagineAvionica y Sistemas de NavegaciónOmar CastellónNessuna valutazione finora
- Instrumentos de NavegaciónDocumento9 pagineInstrumentos de NavegaciónSantiago RestrepoNessuna valutazione finora
- Concepto E HistoriaDocumento13 pagineConcepto E HistoriaROBERT LEONARDO SOTO CORREANessuna valutazione finora
- Radiofaro Omnidireccional de Muy Alta FrecuenciaDocumento5 pagineRadiofaro Omnidireccional de Muy Alta FrecuenciaJesus Ocaña CalderónNessuna valutazione finora
- Diapo. Espacios AereosDocumento23 pagineDiapo. Espacios AereoscontroladoraereoNessuna valutazione finora
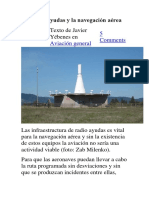
- Las Radio Ayudas y La Navegación AéreaDocumento22 pagineLas Radio Ayudas y La Navegación AéreaMarca DeybitNessuna valutazione finora
- Radiotelefonía aeronáutica: principios y procedimientosDocumento18 pagineRadiotelefonía aeronáutica: principios y procedimientosJose SolerNessuna valutazione finora
- T Espe Itsa 000182 PDFDocumento200 pagineT Espe Itsa 000182 PDFJuan Esteban VillaNessuna valutazione finora
- Estudio Aviónica 3Documento2 pagineEstudio Aviónica 3Greg SandovalNessuna valutazione finora
- Instrumentos de VueloDocumento17 pagineInstrumentos de VueloNicolás OrtegaNessuna valutazione finora
- Funcionamiento de Un RadarDocumento19 pagineFuncionamiento de Un RadarIsrael Macedo100% (1)
- Clase 2 - 3 Navegacion AereaDocumento12 pagineClase 2 - 3 Navegacion AereaYami DiazNessuna valutazione finora
- Clave MetarDocumento22 pagineClave Metarcontroladoraereo100% (1)
- Principios Del Ils-1Documento12 paginePrincipios Del Ils-1Rocio de AcapulcoNessuna valutazione finora
- Reglamento de VueloDocumento167 pagineReglamento de VueloTakashi HirakataNessuna valutazione finora
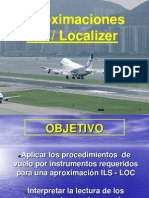
- AproximacionDocumento17 pagineAproximacionJulianNessuna valutazione finora
- Cuadro Especificaciones de NavigacionDocumento1 paginaCuadro Especificaciones de NavigacionJAIRONessuna valutazione finora
- Servicio de Radionavegacion AeronauticaDocumento7 pagineServicio de Radionavegacion AeronauticaKEIDYS100% (1)
- Base de DatosDocumento1 paginaBase de DatosLuis Amaro Villanueva TapiaNessuna valutazione finora
- Presentación en El Sistema EFIS en VORDocumento16 paginePresentación en El Sistema EFIS en VOR'-Matias MaradeiNessuna valutazione finora
- 8 Separaciones de Control de AeródromoDocumento42 pagine8 Separaciones de Control de Aeródromocontroladoraereo100% (1)
- VARIOMETRODocumento3 pagineVARIOMETROLuis Alberto Lopez100% (1)
- Fraseologia AtcDocumento16 pagineFraseologia AtcJorgeAcostaNessuna valutazione finora
- Plan de VueloDocumento12 paginePlan de VuelofefethepilotNessuna valutazione finora
- Proced - Visib.en EsperaDocumento9 pagineProced - Visib.en Esperaveroni-k-andreaNessuna valutazione finora
- Sistema de Navegacion en CabinaDocumento13 pagineSistema de Navegacion en CabinaRafael Liscano VeraNessuna valutazione finora
- La Influencia de La Informatica en Los AvionesDocumento8 pagineLa Influencia de La Informatica en Los Avionesernestoruiz22Nessuna valutazione finora
- Electronica AeronauticaDocumento3 pagineElectronica Aeronauticanatividad20130% (1)
- SEPARACIONDocumento32 pagineSEPARACIONJhoselyn Alvarez GutierrezNessuna valutazione finora
- Sistemas de Comunicaciones AbordoDocumento11 pagineSistemas de Comunicaciones AbordoAndres Miguel EscalonaNessuna valutazione finora
- Fundamentos de AvionicaDocumento17 pagineFundamentos de AvionicaFrancisco GANessuna valutazione finora
- UC0x05-Sistemas de Comunicacion y Navegacion AereaDocumento16 pagineUC0x05-Sistemas de Comunicacion y Navegacion AereaPedro vrNessuna valutazione finora
- Sistema IlsDocumento11 pagineSistema IlsDavid Alejandro Vásquez Gómez100% (1)
- Spim ChartsDocumento25 pagineSpim ChartsJuan Manuel Gallego VanegasNessuna valutazione finora
- Sistemas Electronicos DigitalesDocumento16 pagineSistemas Electronicos DigitalesLogan ValerioNessuna valutazione finora
- FAA - Geometria de Aerodromos (Franja de Pista y Calle de Rodaje)Documento60 pagineFAA - Geometria de Aerodromos (Franja de Pista y Calle de Rodaje)miguelito0% (1)
- Trabajo de Investigacion GpwsDocumento21 pagineTrabajo de Investigacion GpwsJuampi FerNessuna valutazione finora
- Radionavegacion Pol - Mil.aeDocumento87 pagineRadionavegacion Pol - Mil.aeCristian Castro RojasNessuna valutazione finora
- RVSM - Reglas de Vuelo Semi-Circular PDFDocumento2 pagineRVSM - Reglas de Vuelo Semi-Circular PDFAngel CarreroNessuna valutazione finora
- GPWSDocumento8 pagineGPWSRoger Ivan Martinez CastroNessuna valutazione finora
- Resumen de AvionicaDocumento8 pagineResumen de AvionicaAndelson DuarteNessuna valutazione finora
- Tec Control AreaDocumento53 pagineTec Control AreajoshNessuna valutazione finora
- Manual de Sistema IFIS - Junio 2016-1.1Documento103 pagineManual de Sistema IFIS - Junio 2016-1.1dragonargu_1Nessuna valutazione finora
- Navegacion Hiperbolica y Fly by WireDocumento22 pagineNavegacion Hiperbolica y Fly by WireMarcelo CaceresNessuna valutazione finora
- Sistema VorDocumento20 pagineSistema VorJhon CitoNessuna valutazione finora
- TCASDocumento5 pagineTCAScampirignaNessuna valutazione finora
- Radiofaro Omnidireccional VHFDocumento4 pagineRadiofaro Omnidireccional VHFCAOSORIO2004Nessuna valutazione finora
- Piloto AutomaticoDocumento62 paginePiloto AutomaticoQUARK20Nessuna valutazione finora
- 9 Estela TurbulentaDocumento26 pagine9 Estela Turbulentacontroladoraereo100% (3)
- Metrologia de AeronavegacionDocumento12 pagineMetrologia de AeronavegacionJean Pool Tafur Restrepo100% (1)
- 3 Aproximaciones Ils 54Documento54 pagine3 Aproximaciones Ils 54SERONEENessuna valutazione finora
- Aero DR OmosDocumento232 pagineAero DR OmossaharaNessuna valutazione finora
- Altimetría SimplificandoDocumento19 pagineAltimetría SimplificandoEder AcevedoNessuna valutazione finora
- Conceptos de Navegación AéreaDocumento21 pagineConceptos de Navegación Aéreacontroladoraereo100% (2)
- Navegación ObservadaDocumento3 pagineNavegación ObservadaStephany SolísNessuna valutazione finora
- Satelites GpsDocumento4 pagineSatelites GpsJuan Alexander Churata QuispeNessuna valutazione finora
- GPS y GNSSDocumento16 pagineGPS y GNSSNicolas henao pinedaNessuna valutazione finora
- Tipos de RadioayudasDocumento4 pagineTipos de RadioayudasAbraham CastilloNessuna valutazione finora
- Conceptos de Navegacion AereaDocumento19 pagineConceptos de Navegacion AereaCarlos SigchaNessuna valutazione finora
- Ensayo No DestructivoDocumento6 pagineEnsayo No DestructivoRafael Vargas GarciaNessuna valutazione finora
- Manual de Guerrilla y Contraguerrilla MC Oc 112-01-61Documento352 pagineManual de Guerrilla y Contraguerrilla MC Oc 112-01-61Rachel LeeNessuna valutazione finora
- Fresa DoraDocumento17 pagineFresa DoraRafael Vargas GarciaNessuna valutazione finora
- Ensayo Del Motor WankelDocumento9 pagineEnsayo Del Motor WankelRafael Vargas GarciaNessuna valutazione finora
- Clase 2 - Procesos de Fabricacion PDFDocumento49 pagineClase 2 - Procesos de Fabricacion PDFBautista RdgoNessuna valutazione finora
- Temas7 11 PDFDocumento17 pagineTemas7 11 PDFRafael Vargas GarciaNessuna valutazione finora
- Tema 7 Capa Limite 0405Documento30 pagineTema 7 Capa Limite 0405Adderly Fernando Rodriguez FariasNessuna valutazione finora
- Temas7 11 PDFDocumento17 pagineTemas7 11 PDFRafael Vargas GarciaNessuna valutazione finora
- Historia Del Pensamiento MilitarDocumento7 pagineHistoria Del Pensamiento MilitarRafael Vargas GarciaNessuna valutazione finora
- Proyecto Modular Probabilidad y EstaDocumento6 pagineProyecto Modular Probabilidad y EstaHeidi BahenaNessuna valutazione finora
- FormularioRiesgoCovidDocumento1 paginaFormularioRiesgoCovidDiego Solis SalazarNessuna valutazione finora
- Manual HidrociclonDocumento2 pagineManual HidrociclonArias Hidalgo BeMol DanielNessuna valutazione finora
- Roboti..cncu 2024 Mayo 30,31 y 1 Junio Xxi Congreso Interde Informática, HuatulcoDocumento13 pagineRoboti..cncu 2024 Mayo 30,31 y 1 Junio Xxi Congreso Interde Informática, HuatulcolmmbvfxNessuna valutazione finora
- Familias lógicas TTLDocumento12 pagineFamilias lógicas TTLJuan Carlos Ticona QuispeNessuna valutazione finora
- S8 S2-MonopolioDocumento23 pagineS8 S2-MonopolioSalem IsraNessuna valutazione finora
- 02 Programa Montaje 2013 PDFDocumento11 pagine02 Programa Montaje 2013 PDFGustavo Noel Chavarria CastellanoNessuna valutazione finora
- Guia Ciclo Iii Unidades de Longitud - MetroDocumento4 pagineGuia Ciclo Iii Unidades de Longitud - MetrowilsonNessuna valutazione finora
- Informe #9 - Polarización de DiodosDocumento4 pagineInforme #9 - Polarización de DiodosNelson GuamánNessuna valutazione finora
- TP NDocumento3 pagineTP NLucio RodriguezNessuna valutazione finora
- Taller4 2023 1Documento5 pagineTaller4 2023 1alex quinteroNessuna valutazione finora
- DCA-Diseño Completamente al AzarDocumento28 pagineDCA-Diseño Completamente al Azarfitz130576% (21)
- Simulacion de Procesos Quimicos: Universidad Nacional Del Altiplano Facultad de Ingenieria QuimicaDocumento19 pagineSimulacion de Procesos Quimicos: Universidad Nacional Del Altiplano Facultad de Ingenieria Quimicaelia melayde rosello ccasaNessuna valutazione finora
- Reporte laboral con 10 relaciones laboralesDocumento2 pagineReporte laboral con 10 relaciones laboralesJosé Maria BrownNessuna valutazione finora
- Simulador Razonamiento CuantitativoDocumento9 pagineSimulador Razonamiento CuantitativoCarlos Andres Baron100% (1)
- Especificaciones técnicas para construcción de edificioDocumento55 pagineEspecificaciones técnicas para construcción de edificioIvonne Del PozoNessuna valutazione finora
- Multiple Etchings Methodology. A New Approach in Multiphase Steel Characterization (1) .En - EsDocumento7 pagineMultiple Etchings Methodology. A New Approach in Multiphase Steel Characterization (1) .En - Esyolis RJNessuna valutazione finora
- INFORME 3 - Grupo 3Documento8 pagineINFORME 3 - Grupo 3Sandra HumalaNessuna valutazione finora
- Pruebas de Salud FetalDocumento48 paginePruebas de Salud FetalMaria EchavarriaNessuna valutazione finora
- Impacto Del Modelo Pedagógico, Estructura Pedagógica y Herramientas de Trabajo Del Instructor SENA.Documento7 pagineImpacto Del Modelo Pedagógico, Estructura Pedagógica y Herramientas de Trabajo Del Instructor SENA.Cristina Saurit CeledonNessuna valutazione finora
- 08 Liahona Agosto 1981Documento161 pagine08 Liahona Agosto 1981Franco GuillenNessuna valutazione finora
- Tarea 2Documento5 pagineTarea 2Bayron Javier Cortes MartinezNessuna valutazione finora
- Semana 7 DPCCDocumento6 pagineSemana 7 DPCCArmando Mamani FloresNessuna valutazione finora
- GestiónEmpresarialProcesosDocumento29 pagineGestiónEmpresarialProcesosVíctor CarrascoNessuna valutazione finora
- RectificadoresDocumento7 pagineRectificadoresEmanuel SuarezNessuna valutazione finora
- Capilaridad InformeDocumento12 pagineCapilaridad InformeHL100% (1)
- Marco ConceptualDocumento3 pagineMarco ConceptualJessica NoriegaNessuna valutazione finora
- Guia Taller III PC - Gladys 2023Documento13 pagineGuia Taller III PC - Gladys 2023Patricia YaveNessuna valutazione finora
- Tarea BD05Documento4 pagineTarea BD05Santiago Alejandro Mayoral MataNessuna valutazione finora
- Trabajo - Arbol de ProblemasDocumento6 pagineTrabajo - Arbol de ProblemasJessi Casilla ApazaNessuna valutazione finora