Potrebbero piacerti anche
- La Hora Solar PicoDocumento3 pagineLa Hora Solar PicoEdixson Villalobos Avaluador InmobiliarioNessuna valutazione finora
- Practica 8 Circuitos Básicos de RectificaciónDocumento8 paginePractica 8 Circuitos Básicos de RectificaciónGeovanny Gerardo Velasco RomeroNessuna valutazione finora
- CLP U1. Control EléctricoDocumento39 pagineCLP U1. Control EléctricoEduardo ZamudioNessuna valutazione finora
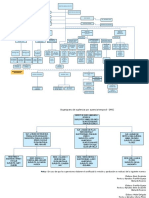
- Arquitectura PLC y señalesDocumento3 pagineArquitectura PLC y señalesCristhian GuidoNessuna valutazione finora
- Sistema de Unidades y PatronesDocumento13 pagineSistema de Unidades y PatronesRuben NoguedaNessuna valutazione finora
- Tipos de RelésDocumento5 pagineTipos de RelésAlejandro GarciaNessuna valutazione finora
- Trabajo GranalladoraDocumento66 pagineTrabajo GranalladoraSEAHORSE79Nessuna valutazione finora
- Regulación Con Diodo ZenerDocumento2 pagineRegulación Con Diodo ZenerModesto Guillen100% (1)
- Criterio de RouthDocumento10 pagineCriterio de RouthJorgeLuisPaivaNessuna valutazione finora
- Tornillo de Potencia 09 NovDocumento55 pagineTornillo de Potencia 09 NovAlice NightmaresNessuna valutazione finora
- Ecuaciones de Primer Orden en Sistemas de ControlDocumento5 pagineEcuaciones de Primer Orden en Sistemas de ControlDaluNessuna valutazione finora
- Análisis Circuitos Resistivos CDDocumento10 pagineAnálisis Circuitos Resistivos CDHugo Castillo GonzalezNessuna valutazione finora
- Procedimientos y Técnicas de AlineaciónDocumento1 paginaProcedimientos y Técnicas de Alineaciónirisson007100% (1)
- Propagación de error en medicionesDocumento18 paginePropagación de error en medicionesSalimNessuna valutazione finora
- Ingenieria ElectronicaDocumento3 pagineIngenieria ElectronicaViviana Karen Lima Irigoyen100% (1)
- 03.-Seminario 3 Toc Minimizacion Funciones ConmutacionDocumento53 pagine03.-Seminario 3 Toc Minimizacion Funciones Conmutacione561826Nessuna valutazione finora
- Estudio de tiempos y movimientos mejora productividad taller automotrizDocumento57 pagineEstudio de tiempos y movimientos mejora productividad taller automotrizPEDRO LUIS ARCIA GUZMANNessuna valutazione finora
- Sistemas de Instrumentación Analogico y DigitalDocumento37 pagineSistemas de Instrumentación Analogico y DigitalGerson Villa Gonzalez0% (1)
- Sistemas de RefrigeraciónDocumento32 pagineSistemas de RefrigeraciónErick AzcárateNessuna valutazione finora
- Sensores y TransductoresDocumento14 pagineSensores y TransductoresTheo PastranaNessuna valutazione finora
- Algebra Booleana, Teoremas y PostuladosDocumento26 pagineAlgebra Booleana, Teoremas y PostuladosJuan ManuelNessuna valutazione finora
- Presentacion Actuadores Electricos PDFDocumento16 paginePresentacion Actuadores Electricos PDFCHQXXVIIINessuna valutazione finora
- Practica 1 AutomatizacionDocumento5 paginePractica 1 AutomatizacionPaul FlorNessuna valutazione finora
- Sistemas MecanicosDocumento14 pagineSistemas MecanicosJose Bazan ValleNessuna valutazione finora
- Transfos Legrand Cat. 09 ViDocumento2 pagineTransfos Legrand Cat. 09 VileonanrdoNessuna valutazione finora
- Controlabilidad y ObservabilidadDocumento18 pagineControlabilidad y ObservabilidadElder N. CoreaNessuna valutazione finora
- Otras Familias Lógicas de Circuitos IntegradosDocumento17 pagineOtras Familias Lógicas de Circuitos IntegradosRicardo Jarquin AndurayNessuna valutazione finora
- Problemas de Motores SincronosDocumento5 pagineProblemas de Motores SincronosLevan Avalos CastilloNessuna valutazione finora
- Sist Control Capitulo2Documento61 pagineSist Control Capitulo2Jeff BybeNessuna valutazione finora
- Metrología y NormalizaciónDocumento8 pagineMetrología y NormalizaciónAlvaro SotoNessuna valutazione finora
- Maquinas 1 Trabajo FinalDocumento26 pagineMaquinas 1 Trabajo FinalMarco Shimabukuro HigaNessuna valutazione finora
- Automatización Industrial, beneficios y desafíos de la Industria 4.0Documento3 pagineAutomatización Industrial, beneficios y desafíos de la Industria 4.0ERICKA ALEXANDRA CALIX FERNANDEZNessuna valutazione finora
- Características Principales de Los PLCsDocumento11 pagineCaracterísticas Principales de Los PLCsNelpz Lopez0% (1)
- 1.mapa Mental PDFDocumento2 pagine1.mapa Mental PDFIsaac DominguezNessuna valutazione finora
- PRÁCTICA No. 5Documento5 paginePRÁCTICA No. 5tatianaleon92Nessuna valutazione finora
- Trabajo de Inv. 1Documento15 pagineTrabajo de Inv. 1Karla roblesNessuna valutazione finora
- Actividad 13. Práctica Simulación Líneas de Transmisión.Documento26 pagineActividad 13. Práctica Simulación Líneas de Transmisión.sandraNessuna valutazione finora
- Mapas Conceptuales de Mantenimiento Centrado y DescentralizadoDocumento4 pagineMapas Conceptuales de Mantenimiento Centrado y DescentralizadoFrancy RodriguezNessuna valutazione finora
- Practica 4 PLCDocumento9 paginePractica 4 PLCMaría Millan TrujilloNessuna valutazione finora
- Programacion Con Contadores y TemporizadoresDocumento13 pagineProgramacion Con Contadores y TemporizadoresNurby ManNessuna valutazione finora
- Diagrama de Mollier: descripción y aplicacionesDocumento40 pagineDiagrama de Mollier: descripción y aplicacionesAlfredoNessuna valutazione finora
- Unidad 2Documento27 pagineUnidad 2RopisDayannaNessuna valutazione finora
- Actuadores de ControlDocumento27 pagineActuadores de ControlArsenio GarciaNessuna valutazione finora
- Análisis de Estabilidad en Un Sistema Mecánico de AmortiguamientoDocumento24 pagineAnálisis de Estabilidad en Un Sistema Mecánico de AmortiguamientoTapay CiprianoNessuna valutazione finora
- Mecanismos U1 Parte 1 1Documento52 pagineMecanismos U1 Parte 1 1Fernando HernandezNessuna valutazione finora
- Tarea 4 Control DigitalDocumento6 pagineTarea 4 Control DigitalAldo CarrilloNessuna valutazione finora
- ArbolesconexcelDocumento1.045 pagineArbolesconexcelPerSk EzNessuna valutazione finora
- 9 Diagramas de FaseDocumento46 pagine9 Diagramas de FaseBrayanBaccaNessuna valutazione finora
- 4Documento14 pagine4Rosvit De la CruzNessuna valutazione finora
- Pu 01Documento45 paginePu 01Joseph MorenoNessuna valutazione finora
- Examen Unidad 4 Relevador ProgramableDocumento10 pagineExamen Unidad 4 Relevador ProgramableHugo Nieves100% (1)
- APLICACIONES de Los TransformadoresDocumento5 pagineAPLICACIONES de Los TransformadoresEsteban RiosNessuna valutazione finora
- Sensores y Transductores (Autoguardado)Documento61 pagineSensores y Transductores (Autoguardado)Jeromy ChoqueNessuna valutazione finora
- TAREA 1 Transistores MOSFET PDFDocumento6 pagineTAREA 1 Transistores MOSFET PDFUriel ZapataNessuna valutazione finora
- Maximos y Minimos RelativosDocumento14 pagineMaximos y Minimos RelativosLuisillo RedNessuna valutazione finora
- Robotica: Transmisiones y Reductores y Sistemas de AccionDocumento4 pagineRobotica: Transmisiones y Reductores y Sistemas de AccionDiego Alejandro Ledesma FloresNessuna valutazione finora
- Minitérminos y MaxitérminosDocumento3 pagineMinitérminos y MaxitérminosAbdon Marquez EfrenNessuna valutazione finora
- Practica 1 Practica de PLC Automatizar y ControlDocumento13 paginePractica 1 Practica de PLC Automatizar y ControlGarcia AlmaNessuna valutazione finora
- T2.2 No Linealidades y LinealizacionDocumento25 pagineT2.2 No Linealidades y LinealizacionCarlos Soto AdradosNessuna valutazione finora
- Linealizacion PDFDocumento6 pagineLinealizacion PDFFernando CastroNessuna valutazione finora
- Modelamiento de ProcesosDocumento21 pagineModelamiento de ProcesosakranaNessuna valutazione finora
- Sensor EsDocumento3 pagineSensor EsakranaNessuna valutazione finora
- Curso de Neumatica Modulo IDocumento7 pagineCurso de Neumatica Modulo IakranaNessuna valutazione finora
- Sistema de Seguridad AntiDocumento5 pagineSistema de Seguridad AntiakranaNessuna valutazione finora
- 2do C Sta Cecilia Modulo FISICOQUIMICA Prof Daniela Solis Medrano 2024Documento135 pagine2do C Sta Cecilia Modulo FISICOQUIMICA Prof Daniela Solis Medrano 2024Lalo LdcNessuna valutazione finora
- Dosificación hormigónDocumento4 pagineDosificación hormigónItalo Andres0% (1)
- Examen Mensual de Fisica 1° Sec. 2019 HonoresDocumento2 pagineExamen Mensual de Fisica 1° Sec. 2019 HonoresalcidesNessuna valutazione finora
- Principio de Arquimides - MecanicaDocumento10 paginePrincipio de Arquimides - MecanicaeberNessuna valutazione finora
- USP30 NF25 Vol1 Spa EnvasesDocumento10 pagineUSP30 NF25 Vol1 Spa EnvasesBraulio Jofré AndradesNessuna valutazione finora
- Densidad de Los Agregados y Capacidad de AbsorciónDocumento7 pagineDensidad de Los Agregados y Capacidad de AbsorciónDani PaatiNessuna valutazione finora
- MANUAL CR-2010. ACTUALIZACIÓN DE SUBBASES Y BASES GRANULARESDocumento12 pagineMANUAL CR-2010. ACTUALIZACIÓN DE SUBBASES Y BASES GRANULARESJoseth ,MoraNessuna valutazione finora
- GFGFGFGDocumento4 pagineGFGFGFGMilerAngelDiazMuñozNessuna valutazione finora
- Determinación de La Densidad de NaCl de Concentración Desconocida Usando Un Volumen CalibradoDocumento14 pagineDeterminación de La Densidad de NaCl de Concentración Desconocida Usando Un Volumen Calibradoexchange201450% (2)
- Tema 4. Características Del Tráfico PDFDocumento19 pagineTema 4. Características Del Tráfico PDFCondori EddyNessuna valutazione finora
- Preparación de lodos y medición de densidadDocumento7 paginePreparación de lodos y medición de densidadDayna Rodriguez Zambrano100% (1)
- IBM Organigrama 2016Documento3 pagineIBM Organigrama 2016nelchy100% (3)
- QuimicaDocumento42 pagineQuimicaYe S.Nessuna valutazione finora
- Segunda Ley de Newton para la rotación: Momento de inerciaDocumento18 pagineSegunda Ley de Newton para la rotación: Momento de inerciaHelmer Jair Saldaña López100% (1)
- Densimetro ResumenDocumento7 pagineDensimetro ResumendfgdgNessuna valutazione finora
- 4 Ejercicios de Las Prop D F PDFDocumento3 pagine4 Ejercicios de Las Prop D F PDFAnderson B. Mancha Rojas100% (1)
- Ficha Etsa Soporte-Tina Tipo1 Rev1Documento2 pagineFicha Etsa Soporte-Tina Tipo1 Rev1Juan de AndresNessuna valutazione finora
- Difusividad Marco TeoricoDocumento7 pagineDifusividad Marco TeoricoRosy Anchiraico ReyesNessuna valutazione finora
- Practica 1 Densidad y AbsorciónDocumento17 paginePractica 1 Densidad y AbsorciónMarco MoralesNessuna valutazione finora
- Acústica ambiental: fuentes y descriptores de ruidoDocumento44 pagineAcústica ambiental: fuentes y descriptores de ruidoDany OlivaresNessuna valutazione finora
- Practica 1 FisicaDocumento9 paginePractica 1 FisicaKENIANessuna valutazione finora
- 01 - 2 Reporte Granulados y ComprimidosDocumento3 pagine01 - 2 Reporte Granulados y ComprimidosVivianka RamirezNessuna valutazione finora
- Fis2 - B123 - GG - Actividades de AprendizajeDocumento19 pagineFis2 - B123 - GG - Actividades de AprendizajeAndre ContrerasNessuna valutazione finora
- Fichas Tecnicas Mamposteria DivisoriaDocumento9 pagineFichas Tecnicas Mamposteria DivisoriajeffersonNessuna valutazione finora
- DensidadDocumento18 pagineDensidadLuisa Fernanda Garcia VargasNessuna valutazione finora
- Control de Calidad para La Construccionde CarreterasDocumento24 pagineControl de Calidad para La Construccionde CarreterasMJRVARGASNessuna valutazione finora
- Pardo Carrion Maria Teresa OBL01 TareaDocumento8 paginePardo Carrion Maria Teresa OBL01 TareaMarytere Pardo Carrion100% (1)
- Medir densidad líquidos sólidosDocumento12 pagineMedir densidad líquidos sólidosJar05100% (3)
- Compuertas planas y curvas: problemas de presión, empuje y flotaciónDocumento6 pagineCompuertas planas y curvas: problemas de presión, empuje y flotaciónanon_551550537Nessuna valutazione finora
- Determinación de errores de medición en análisis químicoDocumento5 pagineDeterminación de errores de medición en análisis químicoAna Maria Guerrero AgudeloNessuna valutazione finora