Potrebbero piacerti anche
- FEM9.311 EnglDocumento6 pagineFEM9.311 EnglPınar SunNessuna valutazione finora
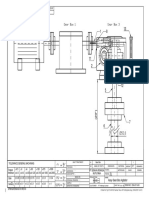
- Assy Gear Box AgitatorDocumento1 paginaAssy Gear Box Agitatorer_winwibowoNessuna valutazione finora
- Book Chapter 10Documento24 pagineBook Chapter 10Camilo Ponce PerezNessuna valutazione finora
- Carbon Steel Tee Rails: Standard Specification ForDocumento7 pagineCarbon Steel Tee Rails: Standard Specification ForAAYNessuna valutazione finora
- Brugg Catalog enDocumento28 pagineBrugg Catalog enSinoj V AntonyNessuna valutazione finora
- Guias Lineares HIWIN PDFDocumento95 pagineGuias Lineares HIWIN PDFEdmar S JNessuna valutazione finora
- Md-17 Shaft Design StepsDocumento12 pagineMd-17 Shaft Design StepsRamji RaoNessuna valutazione finora
- Isis DriveDocumento18 pagineIsis DriveTms ArnNessuna valutazione finora
- Crane Guide Chap-1Documento1 paginaCrane Guide Chap-1Jayadev PalaiNessuna valutazione finora
- Design of Bearings & Miscellaneous ElementsDocumento14 pagineDesign of Bearings & Miscellaneous ElementsjvanandhNessuna valutazione finora
- Eot Crane During SeismicDocumento12 pagineEot Crane During SeismicboyzesNessuna valutazione finora
- Service Factor RatingsDocumento4 pagineService Factor Ratingschu42Nessuna valutazione finora
- Cálculo de EngranajesDocumento18 pagineCálculo de EngranajesJose Luis HernandezNessuna valutazione finora
- Experimental stress analysis improves gondola wagon designDocumento2 pagineExperimental stress analysis improves gondola wagon designrentizahariaNessuna valutazione finora
- Engineering Inspiration - Brake System Design CalculationsDocumento17 pagineEngineering Inspiration - Brake System Design CalculationsManjeet SinghNessuna valutazione finora
- Design and Analysis of Crane Hook With Different MaterialsDocumento6 pagineDesign and Analysis of Crane Hook With Different MaterialsEditor IJTSRDNessuna valutazione finora
- 059 062 PDFDocumento4 pagine059 062 PDFMario MereniNessuna valutazione finora
- 02 Mechanical BasicsDocumento29 pagine02 Mechanical BasicsVLADIMIR YOLVIS CHOQUEHUANCA GALINDONessuna valutazione finora
- Mdesign 2016 Gears Verzahnungen en PDFDocumento86 pagineMdesign 2016 Gears Verzahnungen en PDFmgualdiNessuna valutazione finora
- Bushman C HookDocumento2 pagineBushman C Hookperdhana2000100% (1)
- Gear DesignDocumento83 pagineGear DesignmuhammadaminjamalmutNessuna valutazione finora
- Dynamic Factor FormulaeDocumento15 pagineDynamic Factor FormulaeShubham More0% (1)
- Calculations - Trolley&BaseDocumento10 pagineCalculations - Trolley&BaseShree SalunkheNessuna valutazione finora
- Wheel Model 6 CatalogDocumento40 pagineWheel Model 6 CatalogHernan LopezNessuna valutazione finora
- C HookDocumento11 pagineC HookPradip SitaparaNessuna valutazione finora
- Swapnil (2016) - Design of Components Used in Hoisting Mechanism of An EOTDocumento5 pagineSwapnil (2016) - Design of Components Used in Hoisting Mechanism of An EOTGogyNessuna valutazione finora
- Spiral Springs PDFDocumento18 pagineSpiral Springs PDFEngr Eze Chuklet ChukwumaNessuna valutazione finora
- A Kinematic Analysis of Meshing Polymer Gear TeethDocumento16 pagineA Kinematic Analysis of Meshing Polymer Gear TeethsandeepNessuna valutazione finora
- Brochure 2010Documento20 pagineBrochure 2010shankarsreekumarNessuna valutazione finora
- GB/T 10095.2-2008 Cylindrical Gears Accuracy StandardDocumento5 pagineGB/T 10095.2-2008 Cylindrical Gears Accuracy StandardtaghdirimNessuna valutazione finora
- Wire Ropes Drive Mechanism For Reciprocating Linear MotionDocumento5 pagineWire Ropes Drive Mechanism For Reciprocating Linear MotionSachin KumawatNessuna valutazione finora
- KBK Classic and KBK Ergo Crane Construction Kits GuideDocumento12 pagineKBK Classic and KBK Ergo Crane Construction Kits GuideMahendran KuppusamyNessuna valutazione finora
- Kisssoft Tut 003 E KeyDocumento11 pagineKisssoft Tut 003 E KeyJorge Ronald Cabrera ÑaupaNessuna valutazione finora
- Worm DriveDocumento6 pagineWorm DriveRavi Kiran MeesalaNessuna valutazione finora
- Flender - Ejes ParalelosDocumento49 pagineFlender - Ejes ParalelosYenny LaraNessuna valutazione finora
- Dynamic Force Analysis ProblemsDocumento8 pagineDynamic Force Analysis Problemsa c s KumarNessuna valutazione finora
- Chassis MechanicsDocumento37 pagineChassis Mechanicsneerajsingh000007Nessuna valutazione finora
- Austenitic Cast IronDocumento2 pagineAustenitic Cast Ironkatchani123Nessuna valutazione finora
- CMAA 70 2000 Structure DesignDocumento19 pagineCMAA 70 2000 Structure DesignmishikhanNessuna valutazione finora
- Alform 700 MCDocumento9 pagineAlform 700 MCCarlos Nombela PalaciosNessuna valutazione finora
- Hardened steel pins and weightsDocumento1 paginaHardened steel pins and weightsSachin JawaleNessuna valutazione finora
- Cone Tolerance PDFDocumento21 pagineCone Tolerance PDFPopoaia MarianNessuna valutazione finora
- Loading Factors Within The Strength Calculation Procedure For Involute Marine Gears With Parallel AxesDocumento12 pagineLoading Factors Within The Strength Calculation Procedure For Involute Marine Gears With Parallel AxesNenad VulićNessuna valutazione finora
- A Comparison of The AGMA Gear Design Stresses, The LewisDocumento41 pagineA Comparison of The AGMA Gear Design Stresses, The LewisJulendra AriatedjaNessuna valutazione finora
- Altair Simsolid: 2020 Verification ManualDocumento107 pagineAltair Simsolid: 2020 Verification ManualAnonymous 1rLNlqUNessuna valutazione finora
- Goliath CraneDocumento2 pagineGoliath CraneZankar R ParikhNessuna valutazione finora
- ISO Standardisation of Bevel Gears: Overview and Ideas On Method A"Documento28 pagineISO Standardisation of Bevel Gears: Overview and Ideas On Method A"vincemugnaioNessuna valutazione finora
- Synchronous Belt Drives - Automotive PulleysDocumento14 pagineSynchronous Belt Drives - Automotive Pulleystv-locNessuna valutazione finora
- Samyang Gear ReducerDocumento6 pagineSamyang Gear Reducerjuliyanto88Nessuna valutazione finora
- HVATACDocumento2 pagineHVATACHrvatski strelicarski savezNessuna valutazione finora
- ISO Gear Standards GuideDocumento6 pagineISO Gear Standards GuideEslam YehiaNessuna valutazione finora
- Load Sharing Methods of Backstops 2004 01Documento10 pagineLoad Sharing Methods of Backstops 2004 01Ruben SalgadoNessuna valutazione finora
- Gear ForcesDocumento7 pagineGear ForcesSahil Kumar100% (1)
- Emm 3506 - Group 3Documento132 pagineEmm 3506 - Group 3Griffin ThomasNessuna valutazione finora
- Universal Joint and Theory-Basic PDFDocumento17 pagineUniversal Joint and Theory-Basic PDFPrasadNessuna valutazione finora
- Bonfiglioli Geared MotorDocumento584 pagineBonfiglioli Geared MotorProdip SarkarNessuna valutazione finora
- KranDocumento7 pagineKranMarioNessuna valutazione finora
- GS52Documento3 pagineGS52S.Hasan MirasadiNessuna valutazione finora
- Structural Health MonitoringDa EverandStructural Health MonitoringDaniel BalageasNessuna valutazione finora
- Kukmc 0378 UsDocumento2 pagineKukmc 0378 Usaiyubi2Nessuna valutazione finora
- Kukmc 0377 UsDocumento2 pagineKukmc 0377 Usaiyubi2Nessuna valutazione finora
- Kukmc 0375 UsDocumento4 pagineKukmc 0375 Usaiyubi2Nessuna valutazione finora
- Kukmc 0328 UsDocumento8 pagineKukmc 0328 Usaiyubi2Nessuna valutazione finora
- Fifthwheel - JOST JSK 38CDocumento2 pagineFifthwheel - JOST JSK 38Caiyubi2100% (2)
- Hose Clamps and Ferrules for Assembly of Different FittingsDocumento6 pagineHose Clamps and Ferrules for Assembly of Different Fittingsaiyubi2Nessuna valutazione finora
- MS100-00 (M-MA Series Meter Specs)Documento6 pagineMS100-00 (M-MA Series Meter Specs)aiyubi2Nessuna valutazione finora
- Kukmc 0376 UsDocumento12 pagineKukmc 0376 Usaiyubi2Nessuna valutazione finora
- Kukmc 0328 UsDocumento8 pagineKukmc 0328 Usaiyubi2Nessuna valutazione finora
- Kukmc 0258 UsDocumento2 pagineKukmc 0258 Usaiyubi2Nessuna valutazione finora
- Heavy duty fifth wheel couplings JSK 38 C-1-2Documento2 pagineHeavy duty fifth wheel couplings JSK 38 C-1-2aiyubi2Nessuna valutazione finora
- DODGE Torque-Arm Speed Reducer Feature BenefitDocumento4 pagineDODGE Torque-Arm Speed Reducer Feature Benefitaiyubi2Nessuna valutazione finora
- 400-20 (Meter Manual)Documento28 pagine400-20 (Meter Manual)edwinramonNessuna valutazione finora
- Repair Manual JSK 38Documento38 pagineRepair Manual JSK 38aiyubi2Nessuna valutazione finora
- 200 60 IndustrialDocumento8 pagine200 60 Industrialaiyubi2Nessuna valutazione finora
- Coel Catalogue 2006 1Documento58 pagineCoel Catalogue 2006 1Danilo MontesanoNessuna valutazione finora
- Acf Fastener HandbookDocumento84 pagineAcf Fastener Handbookninjanear2012100% (2)
- C-Line - Front & Back CoversDocumento4 pagineC-Line - Front & Back Coversaiyubi2Nessuna valutazione finora
- DRIV-LOK Press Fit FastenersDocumento28 pagineDRIV-LOK Press Fit Fastenersaiyubi2Nessuna valutazione finora
- Crosby Mckissick Sheaves CatalogDocumento29 pagineCrosby Mckissick Sheaves Catalogaiyubi2Nessuna valutazione finora
- Crosby G-2130Documento1 paginaCrosby G-2130AekJayNessuna valutazione finora
- Blind FastenersDocumento7 pagineBlind Fastenersaiyubi2Nessuna valutazione finora
- CROSBY Master Link & Shackles - MetricDocumento2 pagineCROSBY Master Link & Shackles - Metricaiyubi2Nessuna valutazione finora
- Wire Rope ThimblesDocumento1 paginaWire Rope Thimblesaiyubi2Nessuna valutazione finora
- Tranz Couplings CatalogDocumento4 pagineTranz Couplings Catalogaiyubi2Nessuna valutazione finora
- A-344 & A347 Welded Master Link - ImperialDocumento1 paginaA-344 & A347 Welded Master Link - Imperialaiyubi2Nessuna valutazione finora
- CROSBY Master Link & Shackles - MetricDocumento2 pagineCROSBY Master Link & Shackles - Metricaiyubi2Nessuna valutazione finora
- A-344, A-347 Master LinkDocumento1 paginaA-344, A-347 Master LinkAekJayNessuna valutazione finora
- Universal JointsDocumento10 pagineUniversal JointsshashanksekharNessuna valutazione finora
- APEX U-Joint CatalogDocumento28 pagineAPEX U-Joint Catalogaiyubi2Nessuna valutazione finora
- LNG JettyDocumento17 pagineLNG Jettywilliam pasamonteNessuna valutazione finora
- Pat Lmi Manual - Ds150Documento15 paginePat Lmi Manual - Ds150Anonymous yjK3peI7100% (1)
- Monorail Beam Design Q&ADocumento33 pagineMonorail Beam Design Q&Aabdulloh_99Nessuna valutazione finora
- Altec Lmap CalibrationDocumento17 pagineAltec Lmap Calibrationwilliam ortizNessuna valutazione finora
- 50 Years of Crane Component ExcellenceDocumento32 pagine50 Years of Crane Component ExcellenceMahnooshNessuna valutazione finora
- OSHA - 29CFR - Construction StandardsDocumento22 pagineOSHA - 29CFR - Construction Standardshasan_676489616100% (1)
- Manual enDocumento194 pagineManual enJohnNessuna valutazione finora
- English Translate 1 - 质量证明书Documento12 pagineEnglish Translate 1 - 质量证明书Kiki Kiko KikoNessuna valutazione finora
- Safety in Erection and Dismantling of Constructions: Submitted by Saravana Kumar Saravanan ShilpaDocumento13 pagineSafety in Erection and Dismantling of Constructions: Submitted by Saravana Kumar Saravanan ShilpaMageshwarNessuna valutazione finora
- Function 2Documento78 pagineFunction 2AdiiNessuna valutazione finora
- GR-900EX-4: Hydraulic Rough Terrain CraneDocumento16 pagineGR-900EX-4: Hydraulic Rough Terrain CraneboooNessuna valutazione finora
- 6200 - 1 Superstructure MalfunctionsDocumento82 pagine6200 - 1 Superstructure Malfunctionsrenat100% (1)
- SEVAN LOUISIANA OFFSHORE DRILLING RIG SPECSDocumento1 paginaSEVAN LOUISIANA OFFSHORE DRILLING RIG SPECSfahad mullaNessuna valutazione finora
- TEMPORARY POWER PROJECT PANEL INSTALLATIONDocumento18 pagineTEMPORARY POWER PROJECT PANEL INSTALLATIONNurdin Sudrajat SasrabahuNessuna valutazione finora
- 36x48 Poster of Big Blue Crane Collapse v8Documento1 pagina36x48 Poster of Big Blue Crane Collapse v8Zakaria DinataNessuna valutazione finora
- QUY180 EnglishDocumento22 pagineQUY180 EnglishDarma HermawanNessuna valutazione finora
- Racking Systems Guide for Any Storage DemandDocumento18 pagineRacking Systems Guide for Any Storage DemandSheel JhaNessuna valutazione finora
- Algorithm Crane SelectionDocumento10 pagineAlgorithm Crane SelectionZafr O'ConnellNessuna valutazione finora
- 2018 Product CatalogDocumento23 pagine2018 Product CatalogKien Trung NguyenNessuna valutazione finora
- Crane Chart - Tadano AR-2000MDocumento16 pagineCrane Chart - Tadano AR-2000Mdamnaged100% (2)
- Petroleum Development Oman Lift Plan for Lifting Turbine RotorDocumento7 paginePetroleum Development Oman Lift Plan for Lifting Turbine RotorVuthpalachaitanya KrishnaNessuna valutazione finora
- Girder Installation MethodologyDocumento4 pagineGirder Installation MethodologyRolly EscamillanNessuna valutazione finora
- Lifting+Matters+Q4+2019 Final WEB LRDocumento44 pagineLifting+Matters+Q4+2019 Final WEB LRMeleti Meleti MeletiouNessuna valutazione finora
- Method Statement For The, Gulf Eagle Project: Installation, Commissioning & Load Testing of CraneDocumento14 pagineMethod Statement For The, Gulf Eagle Project: Installation, Commissioning & Load Testing of CraneFAYIZNessuna valutazione finora
- Hansson - Servin - Semi-Autonomous Shared Control For Redundant Forwarder CranesDocumento107 pagineHansson - Servin - Semi-Autonomous Shared Control For Redundant Forwarder CranesHugo SilvaNessuna valutazione finora
- Crosby Mckissick Sheaves CatalogDocumento29 pagineCrosby Mckissick Sheaves Catalogaiyubi2Nessuna valutazione finora
- 1125-003-07Y Cap 7 Mantenimiento Grua QY70V 532Documento25 pagine1125-003-07Y Cap 7 Mantenimiento Grua QY70V 532IAN GRUPNessuna valutazione finora
- View 55-Ton Mobile Crane Specs and Features on FreeCraneSpecs.comDocumento8 pagineView 55-Ton Mobile Crane Specs and Features on FreeCraneSpecs.comPodnosniki dźwigi KielceNessuna valutazione finora
- Industrial Visit Jadhav GearsDocumento11 pagineIndustrial Visit Jadhav GearsDIPAK VINAYAK SHIRBHATE75% (4)
- T05 - Palfinger ATaşman KataloğuDocumento24 pagineT05 - Palfinger ATaşman KataloğusmylmrNessuna valutazione finora