Potrebbero piacerti anche
- Desnutrición y Avitaminosis PDFDocumento62 pagineDesnutrición y Avitaminosis PDFliz castilloNessuna valutazione finora
- G1 ConversoresDocumento61 pagineG1 Conversoresfer6669993Nessuna valutazione finora
- Pts Rodillo Compactador MilkoDocumento12 paginePts Rodillo Compactador MilkoKarina Moreno RiquelmeNessuna valutazione finora
- Practica 6Documento3 paginePractica 6fer6669993Nessuna valutazione finora
- Practica 6Documento3 paginePractica 6fer6669993Nessuna valutazione finora
- Ejemplo de AplicaciónDocumento1 paginaEjemplo de Aplicaciónfer6669993Nessuna valutazione finora
- Circuito Generador de Corriente ConstanteDocumento7 pagineCircuito Generador de Corriente Constantefer6669993Nessuna valutazione finora
- Principales sensores vehículo moderno CTS ECT TPS ACT MAF MAP RPM O2 CKP KS CMP EGRT VVSDocumento3 paginePrincipales sensores vehículo moderno CTS ECT TPS ACT MAF MAP RPM O2 CKP KS CMP EGRT VVSUriel Trinidad PatracaNessuna valutazione finora
- Cuarto Grupo de Preguntas de Ineval PDFDocumento41 pagineCuarto Grupo de Preguntas de Ineval PDFamistasNessuna valutazione finora
- Polarización Fija SimulacioseDocumento3 paginePolarización Fija Simulaciosefer6669993Nessuna valutazione finora
- Practica 4Documento3 paginePractica 4fer6669993Nessuna valutazione finora
- Principales Sensores de Un Vehículo ModernoDocumento6 paginePrincipales Sensores de Un Vehículo Modernofer6669993Nessuna valutazione finora
- Polarización Fija SimulacioseDocumento3 paginePolarización Fija Simulaciosefer6669993Nessuna valutazione finora
- Generador de Corriente ConstanteDocumento1 paginaGenerador de Corriente Constantefer6669993Nessuna valutazione finora
- Deflexión cuerda vibratoriaDocumento2 pagineDeflexión cuerda vibratoriafer6669993Nessuna valutazione finora
- Principales sensores vehículo moderno CTS ECT TPS ACT MAF MAP RPM O2 CKP KS CMP EGRT VVSDocumento3 paginePrincipales sensores vehículo moderno CTS ECT TPS ACT MAF MAP RPM O2 CKP KS CMP EGRT VVSUriel Trinidad PatracaNessuna valutazione finora
- Circuito Generador de Corriente ConstanteDocumento7 pagineCircuito Generador de Corriente Constantefer6669993Nessuna valutazione finora
- Lesiones Del TobilloDocumento5 pagineLesiones Del Tobillofer6669993Nessuna valutazione finora
- Filtro Iir Conversión de Filtros Analógicos BilinealDocumento10 pagineFiltro Iir Conversión de Filtros Analógicos Bilinealfer6669993Nessuna valutazione finora
- Ethernet IndustrialDocumento17 pagineEthernet Industrialfer6669993Nessuna valutazione finora
- AlarmaDocumento5 pagineAlarmafer6669993Nessuna valutazione finora
- EthernetDocumento14 pagineEthernetfer6669993Nessuna valutazione finora
- Presentación SCADADocumento10 paginePresentación SCADAfer6669993Nessuna valutazione finora
- P - 1. Nivel CapacitivoDocumento13 pagineP - 1. Nivel Capacitivofer6669993Nessuna valutazione finora
- Presentación1 REDESDocumento9 paginePresentación1 REDESfer6669993Nessuna valutazione finora
- StopDocumento4 pagineStopfer6669993Nessuna valutazione finora
- Archivo Nuevo1 PDFDocumento9 pagineArchivo Nuevo1 PDFfer6669993Nessuna valutazione finora
- Ceraphant TDocumento4 pagineCeraphant Tfer6669993Nessuna valutazione finora
- AcondicionamientoDocumento20 pagineAcondicionamientoAndres Jacob Sanchez JaraNessuna valutazione finora
- Archivo Nuevo1 PDFDocumento9 pagineArchivo Nuevo1 PDFfer6669993Nessuna valutazione finora
- Instructivo Permiso FuncionamientoDocumento22 pagineInstructivo Permiso Funcionamientoands010Nessuna valutazione finora
- CLC 2Documento2 pagineCLC 2fer6669993Nessuna valutazione finora
- RectificadoresDocumento7 pagineRectificadoresEmanuel SuarezNessuna valutazione finora
- Biología y Geología 3º Eso RecuperaciónDocumento14 pagineBiología y Geología 3º Eso RecuperaciónAdrian Exojo SanzNessuna valutazione finora
- CV Percy MarrerosDocumento34 pagineCV Percy MarrerosSofiaNessuna valutazione finora
- Resolución CDN ONAJPU Del 270716Documento2 pagineResolución CDN ONAJPU Del 270716GrupoEspectadorNessuna valutazione finora
- Guia 9 - Monica Julieth Malagon CortesDocumento18 pagineGuia 9 - Monica Julieth Malagon Cortesjulieth cortesNessuna valutazione finora
- Webquest CompletoDocumento55 pagineWebquest CompletoAldo RomanoNessuna valutazione finora
- ACTA 37-2016 Autoacordado Tramitación ElectrónicaDocumento7 pagineACTA 37-2016 Autoacordado Tramitación ElectrónicaHector Segundo Valenzuela CastellanoNessuna valutazione finora
- Chemayolic Interiores Ficha TecnicaDocumento5 pagineChemayolic Interiores Ficha TecnicaHoshino Lizzy Kuroineko MikadoNessuna valutazione finora
- Pruebas de Salud FetalDocumento48 paginePruebas de Salud FetalMaria EchavarriaNessuna valutazione finora
- El CaligramaDocumento8 pagineEl CaligramaSInamiNessuna valutazione finora
- Aprovisionamiento de Los Almacenes de Repuesto - CompressedDocumento1 paginaAprovisionamiento de Los Almacenes de Repuesto - CompressedDomingo MartinezNessuna valutazione finora
- Proyecto BromatologiaDocumento2 pagineProyecto BromatologiaDaniel CapelloNessuna valutazione finora
- EESPP Túpac Amaru informe prácticas estudianteDocumento2 pagineEESPP Túpac Amaru informe prácticas estudianteJuan Cesar Quispe ArteagaNessuna valutazione finora
- Expocision 2.2.1-2.2.2 Equipo 2 Capital HumanoDocumento14 pagineExpocision 2.2.1-2.2.2 Equipo 2 Capital HumanoSuperVentasQuintanaRooNessuna valutazione finora
- Cirugia de La Incontinencia Anal Del AdultoDocumento16 pagineCirugia de La Incontinencia Anal Del AdultoDavid Salomon Gomez AscencioNessuna valutazione finora
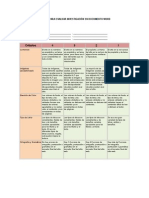
- Rubrica para Evaluar Investigacin en WordDocumento1 paginaRubrica para Evaluar Investigacin en Wordapi-257093331Nessuna valutazione finora
- Síndrome WAGR Por Deleción en Heterocigosis Del Gen WT1. Caso Clínico PediátricoDocumento4 pagineSíndrome WAGR Por Deleción en Heterocigosis Del Gen WT1. Caso Clínico PediátricoLaura Sanchez SuarezNessuna valutazione finora
- Símbolos TuberiasDocumento8 pagineSímbolos TuberiasdavidNessuna valutazione finora
- Yacimientos Petrolíferos Fiscales BolivianosDocumento52 pagineYacimientos Petrolíferos Fiscales Bolivianosdeymar789Nessuna valutazione finora
- Picaduras y MordedurasDocumento9 paginePicaduras y MordedurasRaulito Rey Yucra CcoaNessuna valutazione finora
- ANTIPARASITARIASDocumento2 pagineANTIPARASITARIASdogoNessuna valutazione finora
- Matemáticas IDocumento285 pagineMatemáticas Ielsupernino50% (6)
- Plan de Atencion. 5°Documento5 paginePlan de Atencion. 5°Sandy MartínezNessuna valutazione finora
- Comentario Del Libro de Las 10 EstrategiasDocumento3 pagineComentario Del Libro de Las 10 EstrategiasCarlos León GarridoNessuna valutazione finora
- Caso 1 Resumen Liderar La Transformación Dirección EstratégicaDocumento4 pagineCaso 1 Resumen Liderar La Transformación Dirección EstratégicaMelina CampbellNessuna valutazione finora
- Beethoven Chespirito PDFDocumento1 paginaBeethoven Chespirito PDFsalsanamaNessuna valutazione finora
- Minimos CuadradosDocumento25 pagineMinimos CuadradosWILLIAM JAVIER LEONARDO CONDENessuna valutazione finora