Potrebbero piacerti anche
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationDa EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationNessuna valutazione finora
- Instruction Format 8051Documento26 pagineInstruction Format 8051alex24arulNessuna valutazione finora
- MPMCDocumento20 pagineMPMCAnonymous 3XeTp7drNessuna valutazione finora
- Microprosser 8085Documento15 pagineMicroprosser 8085saigdv1978Nessuna valutazione finora
- MP Viva Questions With AnswersDocumento13 pagineMP Viva Questions With AnswersDeepti ChandrasekharanNessuna valutazione finora
- 8,16,32 Floating Point Processing in ARMDocumento25 pagine8,16,32 Floating Point Processing in ARMOMKAR BHILARE100% (1)
- Two Mark MicroprocessorDocumento18 pagineTwo Mark MicroprocessorGopinathan MNessuna valutazione finora
- MICROPROCESSORS & MICROCONTROLLERS MCQ QUIZDocumento2 pagineMICROPROCESSORS & MICROCONTROLLERS MCQ QUIZchakrimvnNessuna valutazione finora
- 8085 Class Test in Truc TinDocumento1 pagina8085 Class Test in Truc Tinv1rangNessuna valutazione finora
- Chapter 3: Jump, Loop and Call InstructionsDocumento8 pagineChapter 3: Jump, Loop and Call InstructionsIsmailNessuna valutazione finora
- Lab 5 Data Transfer: Y. Use The Simulator To Change The X Value and Single-Step Through TheDocumento3 pagineLab 5 Data Transfer: Y. Use The Simulator To Change The X Value and Single-Step Through Thesabi1234Nessuna valutazione finora
- ARM7 ARCHITECTURE OVERVIEWDocumento8 pagineARM7 ARCHITECTURE OVERVIEWVipin TiwariNessuna valutazione finora
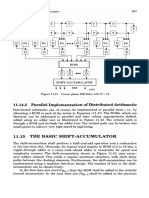
- Basic Shift AccumulatorDocumento4 pagineBasic Shift AccumulatorThahsin ThahirNessuna valutazione finora
- Unit 5 - A CASE STUDY - Using Pic MicrocontrollerDocumento33 pagineUnit 5 - A CASE STUDY - Using Pic MicrocontrollerPoonthalirNessuna valutazione finora
- 17BEC0901 TASK 2 MicrocontrollersDocumento13 pagine17BEC0901 TASK 2 Microcontrollersrohan joshuaNessuna valutazione finora
- Basic Architecture of 8085 Simulator:: GNUSIM8085Documento5 pagineBasic Architecture of 8085 Simulator:: GNUSIM8085Harsh Modi100% (1)
- 2 MarksDocumento30 pagine2 MarksAnitha Kumari SivathanuNessuna valutazione finora
- 8086 Interview Questions:: 8086 MicroprocessorDocumento20 pagine8086 Interview Questions:: 8086 MicroprocessorHamid FarhanNessuna valutazione finora
- Mupi 2 MarksDocumento11 pagineMupi 2 Marksveeyesyes08Nessuna valutazione finora
- 8051 Lab ManualDocumento35 pagine8051 Lab ManualVenkat BalajiNessuna valutazione finora
- Pin Diagram of 8086Documento21 paginePin Diagram of 8086adithya123456100% (5)
- Architecture of Tms320c5xDocumento32 pagineArchitecture of Tms320c5xUjwal Patil100% (1)
- Architecture Diagram of 8085 MicroprocessorDocumento4 pagineArchitecture Diagram of 8085 MicroprocessorbhatiaharryjassiNessuna valutazione finora
- Dspa 17ec751 M5Documento34 pagineDspa 17ec751 M5digital loveNessuna valutazione finora
- EE8551-Microprocessors and MicrocontrollersDocumento13 pagineEE8551-Microprocessors and MicrocontrollersPACET EEENessuna valutazione finora
- Microcontroller and Embedded SystemsDocumento2 pagineMicrocontroller and Embedded SystemsIndranilNessuna valutazione finora
- Chapter 8 - PipeliningDocumento38 pagineChapter 8 - Pipeliningnagpal3Nessuna valutazione finora
- Arm Program ModelDocumento4 pagineArm Program ModelvlkumashankardeekshithNessuna valutazione finora
- Microprocessor and Architecture Solution PDFDocumento23 pagineMicroprocessor and Architecture Solution PDFKarmaveer Bhaurao Patil CollegeNessuna valutazione finora
- Instruction PipelineDocumento27 pagineInstruction PipelineEswin AngelNessuna valutazione finora
- 8051 Interview QuestionsDocumento8 pagine8051 Interview QuestionsSudheer ReddyNessuna valutazione finora
- 8051 MICROCONTROLLER NotesDocumento14 pagine8051 MICROCONTROLLER NotesDhaliwalNessuna valutazione finora
- Case Study On Microprocessor and Assembly LanguageDocumento7 pagineCase Study On Microprocessor and Assembly LanguageTanjimun AfrinNessuna valutazione finora
- Optimize DMA Controller Data TransferDocumento25 pagineOptimize DMA Controller Data Transfersatyanarayana12Nessuna valutazione finora
- 8259a Programmable Interrupt ControllerDocumento42 pagine8259a Programmable Interrupt ControllerzarandijaNessuna valutazione finora
- MICROPORCESSOR 8085 Lab ManualDocumento53 pagineMICROPORCESSOR 8085 Lab ManualAjay PatilNessuna valutazione finora
- Sheet 1 SolutionDocumento5 pagineSheet 1 SolutionMohamed AlfarashNessuna valutazione finora
- 8085 Microprocessor Architecture OverviewDocumento39 pagine8085 Microprocessor Architecture OverviewSana KhanNessuna valutazione finora
- 32-Bit Microprocessor - Student Manual PDFDocumento502 pagine32-Bit Microprocessor - Student Manual PDFSilver Magday JrNessuna valutazione finora
- Interfacing 8253 Timer with 8085 MicroprocessorDocumento2 pagineInterfacing 8253 Timer with 8085 Microprocessormohan100% (1)
- 8255 Ppi ExamplesDocumento10 pagine8255 Ppi Examplesvenky258100% (1)
- ARM Organization and Implementation: Aleksandar MilenkovicDocumento37 pagineARM Organization and Implementation: Aleksandar Milenkovicarthicse100% (1)
- 8086 Trainer Kit User and Technical Reference Manual PDFDocumento71 pagine8086 Trainer Kit User and Technical Reference Manual PDFJohn Johnston0% (1)
- ARM Processors' - ArchitectureDocumento27 pagineARM Processors' - ArchitectureyayavaramNessuna valutazione finora
- Instruction Set 8085Documento19 pagineInstruction Set 8085internetwealthdonNessuna valutazione finora
- Lec# 8 The Addressing Modes of 8085 MicroprocessorDocumento20 pagineLec# 8 The Addressing Modes of 8085 MicroprocessorSalva KhanNessuna valutazione finora
- Interfacing Programs For 8085Documento37 pagineInterfacing Programs For 8085archankumarturagaNessuna valutazione finora
- In Put Out Put OrganizationDocumento45 pagineIn Put Out Put OrganizationdevibalaNessuna valutazione finora
- PIL Question Bank: 80386 and 8051Documento13 paginePIL Question Bank: 80386 and 8051Harish100% (1)
- MPMC Lab ManualDocumento53 pagineMPMC Lab Manualsujaganesan2009Nessuna valutazione finora
- 9A04602 Microprocessors & MicrocontrollersDocumento4 pagine9A04602 Microprocessors & MicrocontrollerssivabharathamurthyNessuna valutazione finora
- 8051 QuestionDocumento9 pagine8051 QuestionJai Singh MauryaNessuna valutazione finora
- Nirma University Institute of Technology: B. Tech. in Electronics and Communication Engineering Semester - VDocumento15 pagineNirma University Institute of Technology: B. Tech. in Electronics and Communication Engineering Semester - VPragya jhalaNessuna valutazione finora
- Biomedical Embedded SystemsDocumento21 pagineBiomedical Embedded SystemsSathiya KumarNessuna valutazione finora
- DMADocumento16 pagineDMALavish Garg0% (1)
- Micro Controller Lab Manual 1Documento38 pagineMicro Controller Lab Manual 1Suresh KumarNessuna valutazione finora
- Question Bank - 150504 - Session - 19 - 20Documento14 pagineQuestion Bank - 150504 - Session - 19 - 20Aashutosh TiwariNessuna valutazione finora
- Ec - 501 - Microprocessor and Its ApplicationDocumento41 pagineEc - 501 - Microprocessor and Its ApplicationDr Nikita ShivhareNessuna valutazione finora
- Microprocessor and Microcontroller ProgrammingDocumento39 pagineMicroprocessor and Microcontroller ProgrammingGunasekaranNessuna valutazione finora
- Greeting ServerDocumento1 paginaGreeting ServerVijayashree VenkatNessuna valutazione finora
- OD FormDocumento1 paginaOD FormVijayashree VenkatNessuna valutazione finora
- The Pursuit of HappynessDocumento4 pagineThe Pursuit of HappynessVijayashree VenkatNessuna valutazione finora
- MarksDocumento1 paginaMarksVijayashree VenkatNessuna valutazione finora
- 1) A. An Assembly Language Program To Perform HEX To ASCII Conversion Using 8085Documento3 pagine1) A. An Assembly Language Program To Perform HEX To ASCII Conversion Using 8085Vijayashree VenkatNessuna valutazione finora
- CBSE Class XII Mathematics Sample Paper 2012 Set IDocumento4 pagineCBSE Class XII Mathematics Sample Paper 2012 Set IVijayashree VenkatNessuna valutazione finora
- Boiler Checklist A4Documento1 paginaBoiler Checklist A4Yudha KurniawanNessuna valutazione finora
- Dynapac Vibratory Roller Cc1200c Plus Parts ManualDocumento20 pagineDynapac Vibratory Roller Cc1200c Plus Parts Manualtyson100% (40)
- Brochure Mi 2023 (Idr - Usd)Documento5 pagineBrochure Mi 2023 (Idr - Usd)sarahNessuna valutazione finora
- Application Note - DAC OutputDocumento4 pagineApplication Note - DAC OutputCosmin Popescu100% (1)
- Individual Work Week Plan for Cabcaban Community High SchoolDocumento2 pagineIndividual Work Week Plan for Cabcaban Community High Schoolgeraldo n. quillaoNessuna valutazione finora
- Tesco: Supplier WebsiteDocumento13 pagineTesco: Supplier WebsiterajatejayNessuna valutazione finora
- AEGISDocumento2 pagineAEGISJhom V VasquezNessuna valutazione finora
- FSD GAA30780EAN Feature and Set Up Description - 2015!05!28Documento196 pagineFSD GAA30780EAN Feature and Set Up Description - 2015!05!28Nebyu GetachewNessuna valutazione finora
- Qualifications: Positioning StatementDocumento5 pagineQualifications: Positioning StatementAmru Fadel TreshNessuna valutazione finora
- C236Y69AdmitCard PDFDocumento1 paginaC236Y69AdmitCard PDFvineet tokasNessuna valutazione finora
- Dokumen - Tips - Coiler VB 2200 Ver f1Documento2 pagineDokumen - Tips - Coiler VB 2200 Ver f1Tamo NekoNessuna valutazione finora
- Rubric Guideline For Software Based Lab: Annexure CDocumento2 pagineRubric Guideline For Software Based Lab: Annexure CTayyaba HussainNessuna valutazione finora
- Introduction To IOT ESE Set-1 AY 2022-23Documento2 pagineIntroduction To IOT ESE Set-1 AY 2022-23nehashroff36Nessuna valutazione finora
- Samsung SDS EMM Admin Portal Help v16 - 9 PDFDocumento398 pagineSamsung SDS EMM Admin Portal Help v16 - 9 PDFMaximiliano BitocchiNessuna valutazione finora
- NMEA 0183 To SeaTalkNG Converter Installation Instructions 87256-1-EnDocumento42 pagineNMEA 0183 To SeaTalkNG Converter Installation Instructions 87256-1-EnMichalNessuna valutazione finora
- Capstone C200 Microturbine: Technical ReferenceDocumento126 pagineCapstone C200 Microturbine: Technical ReferenceCarloNessuna valutazione finora
- Introduction To OOP & Functions in C++Documento6 pagineIntroduction To OOP & Functions in C++OwimarkNessuna valutazione finora
- MECH ENG Software Lab CourseDocumento26 pagineMECH ENG Software Lab CourseManish SinghNessuna valutazione finora
- User Guide: IBM Cognos Controller Financial Analytics PublisherDocumento56 pagineUser Guide: IBM Cognos Controller Financial Analytics PublisherAdnan SherazNessuna valutazione finora
- Chapter 6 (Counter)Documento14 pagineChapter 6 (Counter)Amera AdilNessuna valutazione finora
- Install Pacs OneDocumento30 pagineInstall Pacs OnePedro OliveiraNessuna valutazione finora
- GTU Power Quality Course Prepares StudentsDocumento3 pagineGTU Power Quality Course Prepares StudentsTanvi IsraniNessuna valutazione finora
- Nero Video Log AnalysisDocumento55 pagineNero Video Log AnalysisSalvador Quezada de LeónNessuna valutazione finora
- Haseeb Ahmed, PMP®Documento4 pagineHaseeb Ahmed, PMP®Haseeb AhmadNessuna valutazione finora
- ColorNavigator 6 How To Use GuideDocumento5 pagineColorNavigator 6 How To Use GuidephaeganNessuna valutazione finora
- Experiment: Blocked Rotor Test on a 3-Phase Induction MotorDocumento2 pagineExperiment: Blocked Rotor Test on a 3-Phase Induction MotorTushar GairolaNessuna valutazione finora
- Sales Tax Invoice-UETDocumento4 pagineSales Tax Invoice-UETYasir KhalidNessuna valutazione finora
- Ex StdPID ModPIDenUS - PDF en-USDocumento66 pagineEx StdPID ModPIDenUS - PDF en-USA. Muhsin PamungkasNessuna valutazione finora
- Orion ZF 4HP22 24 4Spd 4solDocumento10 pagineOrion ZF 4HP22 24 4Spd 4solEdwinNessuna valutazione finora
- COMOS Platform Interfaces EnUS en-USDocumento226 pagineCOMOS Platform Interfaces EnUS en-USMichel León FrancoNessuna valutazione finora