Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
9 Rectificacion
Caricato da
Marlon Torres TerronesTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
9 Rectificacion
Caricato da
Marlon Torres TerronesCopyright:
Formati disponibili
341 Field Guide
Captulo 9 Rectificacin
Introduccin Los datos crudos de imgenes de sensores de remotos, obtenidos mediante satlites o aviones,
son representaciones de la superficie irregular de la tierra. Incluso las imgenes de zonas de
topografa plana tienen distorsiones debido a la curvatura de la tierra y al sensor utilizado. Este
captulo cubre los procesos de correccin geomtrica de una imagen de manera que se pueda
representar en una superficie plana, integrarse a otras imgenes y tener la integridad de un mapa.
Un sistema de proyeccin cartogrfica es cualquier sistema diseado para representar la
superficie de una esfera o de un esferoide (tal como la Tierra) sobre un plano. Existen diversos
mtodos de proyeccin cartogrfica. Como el aplanamiento de una esfera sobre un plano causa
distorsiones a la superficie, cada sistema de proyeccin cartogrfica compromete la exactitud
entre ciertas propiedades, tales como la conservacin de la distancia, el ngulo o el rea. Por
ejemplo, en proyecciones cartogrficas de igual rea, un crculo de un determinado dimetro
dibujado en cualquier parte del mapa representa la misma rea total. Esto es til para comparar
reas de uso de la tierra, densidad y muchas otras aplicaciones. Sin embargo, para mantener las
reas iguales, las formas, los ngulos y las escala pueden tener distorsin en algunas partes del
mapa (Jensen 1996).
Existen varios sistemas de coordenadas cartogrficas para determinar la localizacin de una
imagen. Estos sistemas de coordenadas se ajustan a una cuadrcula y son expresados como pares
de nmeros X, Y (columna, fila). Cada sistema de proyeccin cartogrfica est asociado con un
sistema de coordenadas cartogrficas.
La rectificacin es el proceso de transformar los datos de un sistema de cuadrcula en otro
sistema de cuadrcula usando una transformacin geomtrica. Aunque las transformaciones
polinmicas y los mtodos basados en triangulacin se describen en este captulo, una discusin
detallada sobre las diversas tcnicas de rectificacin se puede encontrar en Yang (1997). Como
los pixeles de la nueva cuadrcula pueden no estar alineados con los pixeles de la grilla original,
los pixeles deben ser remuestreados. El remuestreo es el proceso de extrapolar niveles digitales
para los pixeles de la nueva grilla a partir de los valores de los pixeles originales.
Registro En muchos casos, se deben usar juntas las imgenes de un rea que se han adquirido a partir de
diferentes fuentes. Para poder comparar imgenes separadas, pixel por pixel, las cuadrculas de
los pixeles de cada imagen deben estar ajustadas con las de las otras imgenes de la base de
datos. Las herramientas para rectificar datos de imgenes se usan para transformar imgenes
dispares a un mismo sistema de coordenadas. El registro es el proceso de hacer una imagen
conforme a otra imagen. Un sistema de coordenadas cartogrficas no est necesariamente
involucrado. Por ejemplo, si la imagen A no est rectificada y se va a usar con la imagen B,
entonces la imagen B debe registrarse a la imagen A de manera que sean conformes una con
otra. En este ejemplo, la imagen A no est rectificada en una proyeccin cartogrfica particular,
de manera tal que no hay necesidad de rectificar la imagen B a una proyeccin cartogrfica.
C A P T U L O 9
Rectificacin
Rectificacin
342 ERDAS
Georeferenciacin La georeferenciacin se refiere al proceso de asignar coordenadas cartogrficas a los datos de
una imagen. Los datos pueden estar ya proyectados en el plano deseado, pero no estar
referenciados en el sistema de coordenadas apropiado. La rectificacin, por definicin,
involucra la georeferenciacin ya que todos los sistemas de proyeccin cartogrfica estn
asociados con coordenadas cartogrficas. El registro imagen-a-imagen involucra
georeferenciacin nicamente si la imagen de referencia ya est georeferenciada. La
georeferenciacin, por s misma, involucra nicamente el cambio de la informacin de
coordenadas cartogrficas en el archivo de la imagen. La cuadrcula (grilla) de la imagen no
cambia.
Los datos geocodificados son imgenes que se han rectificado en una proyeccin cartogrfica y
en un tamao de pixel particular y que usualmente tienen correcciones radiomtricas aplicadas.
Es posible comprar datos de imgenes que ya estn geocodificados. Los datos geocodificados
deberan ser rectificados nicamente si ellos deben estar conforme a un sistema de proyeccin
diferente o deben ser registrados a otros datos rectificados.
Latitud/Longitud Lat/Lon es un sistema de coordenadas esfricas que no est asociado con una proyeccin
cartogrfica. Lat/Lon expresa las posiciones en trminos de un esferoide, no de un plano. As
que, una imagen no est usualmente rectificada en Lat/Lon, aunque es posible convertir
imgenes a Lat/Lon, y en este captulo se incluyen algunas sugerencias para hacerlo.
Usted puede ver la informacin de proyeccin cartogrfica para un archivo particular
usando la utilidad Image Information. Image Information le permite a usted modificar la
informacin cartogrfica que est incorrecta. Sin embargo, usted no puede rectificar
datos usando Image Information. Usted debe usar las herramientas Rectification
descritas en este captulo.
Las propiedades de las proyecciones cartogrficas y las de los sistemas particulares de
proyeccin cartogrfica se discuten en captulo 12 "Cartografa" y apndice Apndice B
"Proyecciones Cartogrficas".
Ortorectificacin Ortorectificacin es una forma de rectificacin que corrige el desplazamiento debido al terreno
y que se puede usar si existe un DEM del rea de estudio. Est basada en las ecuaciones de
colinealidad, que se pueden derivar usando GCPs (puntos de control terrestre) en 3D. En reas
relativamente planas, la ortorectificacin no es necesaria, pero en reas montaosas (o en
fotografas areas de edificios), en las cuales se requiere un alto grado de exactitud, se
recomienda la ortorectificacin.
Vea captulo 7 "Conceptos Fotogramtricos" para ms informacin sobre
ortorectificacin.
Cundo
Rectificar
La rectificacin es necesaria en los casos en los cuales la cuadrcula de pixeles de la imagen se
debe cambiar para ajustarse a un sistema de proyeccin cartogrfica o a una imagen de
referencia. Existen varias razones para rectificar datos de imgenes:
343
Cundo Rectificar
Field Guide
comparacin de pixeles de escena a escena en algunas aplicaciones, tales como deteccin
del cambio o cartografa de inercia termal (comparacin da y noche)
desarrollo de bases de datos SIG para modelamiento
identificacin de muestras de entrenamiento de acuerdo con las coordenadas cartogrficas
antes de realizar la clasificacin
creacin de fotomapas exactos, a escala
superposicin de imgenes con datos vectoriales, tales como ArcInfo
comparacin de imgenes que estn originalmente en escalas diferentes
extraccin de medidas exactas de reas y distancias
mosaicos de imgenes
realizacin de otros anlisis que requieren posiciones geogrficas precisas
Antes de rectificar los datos, usted debe determinar el sistema de coordenadas apropiado para
la base de datos. Para seleccionar el sistema de coordenadas y la proyeccin cartogrfica
adecuadas, se debe considerar el uso primario de los datos.
Si usted est realizando un proyecto gubernamental, la proyeccin puede estar predeterminada.
Una proyeccin muy usada por el gobierno de Estados Unidos es State Plane. Use una
proyeccin de igual rea para mapas temticos o de distribucin y una proyeccin conforme o
de igual rea para mapas de presentacin. Antes de seleccionar una proyeccin cartogrfica,
considere lo siguiente:
Qu tan grande o pequea es el rea mapeada? Existen diferentes proyecciones para
diferentes tamaos de rea.
En qu lugar del globo est el rea de estudio? Las regiones polares y las regiones
ecuatoriales requieren diferentes proyecciones para mayor exactitud.
Cul es la extensin del rea de estudio? Las reas circulares, norte-sur, este-oeste y las
reas oblicuas pueden requerir diferentes sistemas de proyeccin (ESRI 1992).
Cundo
Georeferenciar
nicamente
La rectificacin no es necesaria si no existe distorsin en la imagen. Por ejemplo, si un archivo
de imagen se obtiene mediante escaneo o digitalizacin de un mapa en papel que est en el
sistema de proyeccin deseado, entonces la imagen ya es plana y no requiere rectificacin a
menos que exista inclinacin o rotacin de la imagen. El escaneo y la digitalizacin producen
imgenes que son planas pero que no contienen ninguna informacin de coordenadas
cartogrficas. Estas imgenes requieren nicamente ser georeferenciadas, lo cual es un proceso
mucho ms simple que la rectificacin. En muchos casos, el encabezado de la imagen puede
simplemente ser actualizado con una informacin de coordenadas cartogrficas. Esto involucra
redefinir:
la coordenada cartogrfica de la esquina superior izquierda de la imagen
el tamao de la celda (el rea representada por cada pixel)
Esta informacin es usualmente la misma para cada capa (banda) de un archivo de imagen,
aunque podra ser diferente. Por ejemplo, el tamao de celda de la banda 6 de datos Landsat TM
es diferente que el tamao de la celda de las otras bandas.
Rectificacin
344 ERDAS
Use la utilidad Image Information para modificar el encabezado del archivo de la imagen
que est incorrecto.
Desventajas de la
Rectificacin
Durante la rectificacin, los niveles digitales de los pixeles rectificados deben ser remuestreados
para ajustarlos a la nueva cuadrcula de filas y columnas de pixeles. Aunque algunos de los
algoritmos para el clculo de esos valores son altamente confiables, se puede perder integridad
espectral de los datos durante la rectificacin. Si las coordenadas cartogrficas o las unidades
cartogrficas no son necesarias en la aplicacin, entonces es aconsejable no rectificar la imagen.
Una imagen no rectificada es espectralmente ms correcta que una imagen rectificada.
Clasificacin
Algunos analistas recomiendan realizar la clasificacin antes de la rectificacin, ya que la
clasificacin se puede basar en los niveles digitales originales. Otro beneficio es que un archivo
temtico tiene nicamente una banda para rectificar en lugar de las mltiples bandas de un
archivo continuo. De otro lado, puede ser benfico rectificar los datos primero, especialmente
cuando se usan datos GPS para los GCPs. Debido a que estos datos son muy exactos, la
clasificacin puede ser ms exacta si las nuevas coordenadas ayudan a la localizacin de
mejores muestras de entrenamiento.
Archivos Temticos
El mtodo de remuestreo del vecino ms cercano es el nico apropiado para archivos temticos,
lo cual puede ser una desventaja en algunas aplicaciones. Los mtodos de remuestreo
disponibles se discuten posteriormente en este captulo.
Pasos para la
Rectificacin
NOTA: El registro y la rectificacin involucran conjuntos de procedimientos similares. A travs
de esta documentacin, muchas referencias para la rectificacin tambin aplican al registro
imagen-a-imagen.
Usualmente, la rectificacin es la conversin de las coordenadas de archivo de los datos a otra
cuadrcula y sistema de coordenadas, llamada un sistema de referencia. La rectificacin o el
registro de los datos de una imagen en un disco involucra los siguientes pasos generales,
independientemente de la aplicacin:
1. Ubique GCPs.
2. Calcule y pruebe una transformacin.
3. Cree un archivo de imagen de salida con la nueva informacin de corodenadas en el
encabezado. Los pixeles deben ser remuestreados para ajustarse a la nueva cuadrcula.
Las imgenes pueden ser rectificadas en el despliegue (en un visor o viewer) o sobre el disco.
La rectificacin en el despliegue es temporal pero la rectificacin en el disco es permanente,
porque se crea un nuevo archivo. La rectificacin sobre el disco involucra:
Reacomocodar los pixeles de la imagen a una nueva cuadrcula que se ajuste a un plano en
la proyeccin cartogrfica y en el sistema de coordenadas nuevos.
Insertar nueva informacin en el encabezado del archivo, tal como las coordenadas de la
esquina superior izquierda y el rea representada por cada pixel.
345
Puntos de Control Terrestre
Field Guide
Puntos de
Control Terrestre
Los GCPs son pixeles especficos de una imagen para los cuales se conocen las coordenadas
cartogrficas de salida (u otras coordenadas de salida). Los GCPs consisten de dos pares X,Y
de coordenadas:
coordenadas fuenteusualmente coordenadas de archivo de los datos de la imagen que se
va a rectificar
coordenadas de referencialas coordenadas del mapa o de la imagen de referencia a la cual
la imagen fuente se va a registrar
El trmino coordenadas cartogrficas se usa algunas veces para referirse a coordenadas de
referencia y a coordenadas rectificadas. Estas coordenadas no estn limitadas a coordenadas
cartogrficas. Por ejemplo, en registro imagen a imagen, las coordenadas cartogrficas no son
necesarias.
GCPs en ERDAS
IMAGINE
Cualquier imagen ERDAS IMAGINE puede tener un GCP asociado con ella. El conjunto de
GCP es almacenado en el archivo de la imagen junto con las capas raster. Si un conjunto GCP
existe para el archivo superior que est desplegado en el Viewer, entonces esos GCPs pueden
ser desplegados cuando la herramienta GCP Tool es abierta.
En la matriz de datos GCP que se despliega en la herramienta GCP Tool, una columna muestra
el identificador (ID) de cada GCP. El ID de cada punto es un nombre dado a los GCPs en
archivos separados que representan la misma posicin geogrfica. Estos GCPs son llamados
GCPs correspondientes.
Una cadena de texto default para el ID de cada punto es proporcionada (tal como GCP #1), pero
usted puede entrar su propio identificador (ID) nico para especificar los GCPs
correspondientes cuando sea necesario. An cuando nicamente un conjunto de GCPs est
asociado con un archivo de imagen, un conjunto GCP puede incluir GCPs para un nmero dado
de rectificaciones, cambiando los IDs de cada punto para grupos diferentes de GCPs
correspondientes.
Entrada de GCPs Tener GCPs exactos es esencial para una rectificacin exacta. A partir de los GCPs, se
extrapolan las coordenadas rectificadas de todos los dems puntos de la imagen. Seleccione
muchos GCPs en toda la escena. Entre ms separados estn los GCPs, ms confiable es la
rectificacin. Los GCPs para imgenes en escala grande pueden incluir la interseccin de dos
vas, las pistas de aterrizaje, los corredores de servicios pblicos, torres o edificios. Para
imgenes en escala pequea, se pueden usar elementos grandes tales como reas urbanas o
rasgos geolgicos. Elementos variables (por ejemplo, los lmites de lagos u otros cuerpos de
agua, vegetacin, etc) no deberan usarse.
Las coordenadas fuente y de referencia de los GCPs pueden entrarse de las siguientes maneras:
Ellas pueden ser conocidas a priori, y entradas desde el teclado.
Use el mouse para seleccionar un pixel de una imagen en el Viewer. Con los dos viewers
abiertos, el origen y el destino, entre las coordenadas fuente y las coordenadas de referencia
para el registro imagen a imagen.
Use una tableta digitalizadora para registrar una imagen a un mapa en copia dura.
La informacin sobre el uso y la configuracin de una tableta digitalizadora es discutida
en captulo 2 "Capas Vectoriales".
Rectificacin
346 ERDAS
Opcin Tableta Digitalizadora
Si los GCPs son digitalizados de un mapa en papel usando una tableta digitalizadora, se deben
tener mapas bsicos de buena exactitud. Usted debera tratar de ajustar la resolucin de la
imagen con la escala y proyeccin del mapa fuente. Por ejemplo, los cuadrngulos a escala
1:24,000 de USGS son buenos mapas bsicos para rectificar imgenes Landsat TM y SPOT.
Evite usar mapas de escala menor que 1:250,000 si es posible. Los mapas gruesos (por ejemplo,
1:250,000) son tiles para imgenes de resolucin muy baja (p.e., AVHRR) y los mapas bsicos
finos (p.e., 1:24,000) son tiles para imgenes de resolucin espacial fina (p.e., Landsat y
SPOT).
Opcin Mouse
Cuando se entran GCPs con el mouse, usted debera tratar de ajustar la imagen de resolucin
gruesa a la imagen de resolucin fina (ejemplo, Landsat TM a SPOT) y evitar ampliar la
resolucin ms all del radio de convolucin cbica (un rea de 4 4). En otras palabras, usted
no debera tratar de ajustar Landsat MSS o Landsat TM a una fotografa area.
Cmo se Almacenan los GCPs
Los GCPs entrados con el mouse son almacenados en el archivo de la imagen y aquellos
entrados con el teclado o usando una tableta digitalizadora son almacenados en un archivo
separado con la extensin .gcc.
Prediccin y Ajuste
de GCP
La prediccin automtica de GCP permite al usuario picar un GCP en cualquier sistema de
coordenadas y automticamente localizar ese punto en otro sistema de coordenadas basado en
los parmetros de transformacin actuales.
El ajuste automtico de GCP es un paso adelante de la prediccin GCP. Para una rectificacin
imagen a imagen, un GCP seleccionado en una imagen es ajustado de manera precisa a su
contraparte en la otra imagen usando las caractersticas espectrales de los datos y la
transformacin geomtrica. El ajuste GCP permite al usuario afinar una rectificacin para
obtener resultados exactos.
Los dos mtodos requieren una transformacin existente que consiste de un conjunto de
coeficientes usados para convertir de un sistema al otro.
Prediccin GCP
La prediccin GCP es una tcnica til para ayudar a determinar si se han recolectado suficientes
GCPs. Despus de seleccionar algunos GCPs, seleccione un punto en la imagen fuente o en la
imagen destino, luego use prediccin GCP para localizar el GCP correspondiente en la otra
imagen (mapa). Este punto es determinado basado en la transformacin actual derivada de los
GCPs existentes. Examine el punto generado automticamente y vea que tan exacto es. Si est
dentro de un nivel aceptable de exactitud, entonces existen suficientes GCPs para realizar una
rectificacin exacta (dependiendo de la separacin entre los GCPs). Si el punto generado
automticamente no es exacto, entonces se deben utilizar ms GCPs antes de rectificar la
imagen.
La prediccin GCP tambin puede ser usada cuando se aplica una transformacin existente a
otra imagen en un conjunto de datos. Esto ahorra tiempo en la seleccin manual de otro conjunto
de GCPs. Luego que los GCPs se han seleccionado automticamente, aquellos que no cumplen
un nivel aceptable de error pueden ser editados.
347
Transformacin Polinmica
Field Guide
Ajuste GCP
En el ajuste de GCP, usted puede seleccionar cules capas de la imgenes de fuente y de destino
se usan. Como el proceso de ajuste se basa en los valores de reflectancia, se deben seleccionar
capas que tengan longitudes de onda similares, tales como dos bandas visibles o dos bandas
infrarojas. Usted puede ejecutar ajuste de histogramas para asegurar que no hay
desplazamientos entre las imgenes. Usted tambin puede seleccionar el radio a partir del GCP
que se ha pronosticado desde donde la operacin de ajuste busca los pixeles espectralmente
similares. La ventana de bsqueda puede ser cualquier valor impar entre 5 5 y 21 21.
El ajuste de histogramas se discute en captulo 5 "Realces".
Un umbral de correlacin se usa para aceptar o descartar puntos. La correlacin vara entre
-1.000 y +1.000. El umbral es un valor absoluto que vara entre 0.000 y 1.000. Un valor de 0.000
indica un ajuste malo y un valor de 1.000 indica un ajuste exacto. Se recomiendan valores
superiores a 0.8000 o 0.9000. Si un ajuste no se puede hacer porque el valor absoluto de la
correlacin es menor que el umbral, usted tiene la opcin de descartar puntos.
Transformacin
Polinmica
Las ecuaciones polinmicas son usadas para convertir coordenadas coordenadas de archivos
fuente en coordenadas rectificadas (de mapa). Dependiendo de la distorsin de la imagen, el
nmero de GCPs usados y su localizacin relativa a los dems puntos, se pueden requerir
polinomios complejos para expresar la transformacin necesaria. El grado de complejidad del
polinomio es expresado como el orden del polinomio. El orden es simplemente el exponente
ms alto usado en el polinomio.
El orden de la transformacin es el orden del polinomio usado en la transformacin. ERDAS
IMAGINE permite transformaciones de 1er orden hasta n orden. Usualmente se usan
transformaciones de primer y de segundo orden.
Usted puede especificar el orden de la transformacin que desea usar en Transform
Editor.
Una discusin de polinomios y ordenes se incluye en apndice A "Temas de Matemticas".
Matriz de
Transformacin
Una matriz de transformacin es calculada a partir de los GCPs. La matriz consiste de
coeficientes que son usados en ecuaciones polinmicas para convertir las coordenadas. El
tamao de la matriz depende del orden de la transformacin. La meta en el clculo de los
coeficientes de la matriz es derivar las ecuaciones polinmicas para las cuales existe la menor
cantidad de error cuando ellas se usan para transformar las coordenadas de referencia de los
GCPs en coordenadas fuente. No siempre es posible derivar coeficientes que no produzcan
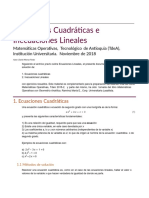
errores. Por ejemplo, en la Figura 9-1 en la pgina 348, los GCPs se han dibujado y comparado
con la curva que est expresada por un polinomio.
Rectificacin
348 ERDAS
Figura 9-1: Curva Polinomial vs. GCPs
Cada GCP influencia los coeficientes, an si no existe un ajuste perfecto de cada GCP con el
polinomio que representan los coeficientes. La distancia entre la coordenada de referencia y la
curva se conoce como error RMS, que se discute ms adelante en este captulo. El mtodo de
regresin por mnimos cuadrados es utilizado para calcular la matriz de transformacin a partir
de los GCPs. Este mtodo es muy comn y se discute en textos de estadstica.
Transformaciones
Lineales
Una transformacin de 1er orden es una transformacin lineal. Ella puede cambiar:
posicin en X y/o Y
escala en X y/o Y
inclinacin en X y/o Y
rotacin
Las transformaciones de primer orden se pueden usar para proyectar imgenes crudas en una
proyeccin cartogrfica, convertir una proyeccin cartogrfica a otra proyeccin cartogrfica y
en la rectificacin de imgenes de reas relativamente pequeas. Usted puede ejecutar
transformaciones lineales simples a una imagen desplegada en un visor o a la matriz de
transformacin en s misma. Las transformaciones lineales pueden ser requeridas antes de
recolectar GCPs en la imagen desplegada. Usted puede reorientar datos Landsat TM inclinados,
rotar mapas topogrficos escaneados de acuerdo con el ngulo de declinacin indicado en la
leyenda y rotar datos descendientes de manera tal que el norte quede hacia arriba.
Una transformacin de 1er orden tambin se puede usar para datos que ya estn proyectados en
un plano, pero que no se han rectificado a la proyeccin cartogrfica deseada. Cuando se realiza
este tipo de rectificacin, no es recomendable incrementar el orden de la transformacin si
ocurre un error RMS grande al principio. Examine otros factores primero, tales como la fuente
y distribucin de GCPs y busque errores sistemticos.
ERDAS IMAGINE proporciona las siguientes opciones para transformaciones de 1er orden:
escala
traslacin
rotacin
reflexin
Source X coordinate
R
e
f
e
r
e
n
c
e
X
c
o
o
r
d
i
n
a
t
e
GCP
Polynomial curve
349
Transformacin Polinmica
Field Guide
Escala
Escala es igual a la option zoom en el visor, excepto que usted puede especificar diferentes
factores de escala para X y para Y.
Si usted est escalando una imagen en el visor, la opcin zoom deshace los cambios de
escala que usted haya hecho y viceversa.
Traslacin
Traslacin mueve la imagen un nmero de pixeles que haya especificado el usuario en las
direcciones X y Y.
Rotacin
Para rotacin, usted puede especificar cualquier nmero positivo o negativo de grados de
rotacin en sentido horario u antihorario. La rotacin ocurre alrededor del pixel central de la
imagen.
Reflexin
Las opciones de reflexin permiten realizar las siguientes operaciones:
reflexin de izquierda a derecha
reflexin de arriba hacia abajo
reflexin de derecha y arriba hacia abajo (igual a rotacin de 180)
Los ajustes lineales estn disponibles desde el Viewer o desde Transform Editor. Usted
puede realizar transformaciones lineales en el Viewer y luego cargar esa transformacin
a Transform Editor, o usted puede realizar las transformaciones lineales directamente en
la matriz de transformacin.
La Figura 9-2 en la pgina 350 ilustra cmo cambian los datos en transformaciones lineales.
Rectificacin
350 ERDAS
Figura 9-2: Transformaciones Lineales
La matriz de transformacin para una transformacin de 1er orden consiste de seis
coeficientestres para cada coordenada (X y Y).
a
0
a
1
a
2
b
0
b
1
b
2
Los coeficientes se usan en un polinomio de 1er orden como se indica enseguida:
Donde:
x e y son coordenadas fuente (entrada)
x
o
e y
o
son coordenadas rectificadas (salida)
los coeficientes de la matriz de transformacin son los indicados arriba.
La posicin de los coeficientes en la matriz y la asignacin de los coeficientes en el
polinomio son una convencin ERDAS IMAGINE. Otras representaciones de una matriz
de transformacin de 1er orden pueden tomar una forma diferente.
Transformaciones
No Lineales
Las transformaciones de segundo o mayor orden son transformaciones no lineales. Estas
transformaciones pueden corregir distorsiones no lineales. El proceso de corregir distorsiones
no lineales tambin se conoce rubber sheeting. La Figura 9-3 en la pgina 351 ilustra los efectos
de algunas transformaciones no lineales.
original image change of scale in X change of scale in Y
change of skew in X change of skew in Y rotation
x
o
a
0
a
1
x a
2
y + + =
y
o
b
0
b
1
x b
2
y + + =
351
Transformacin Polinmica
Field Guide
Figura 9-3: Transformaciones No Lineales
Las transformaciones de segundo orden tambin pueden usarse para convertir datos Lat/Lon a
una proyeccin plana, para datos que cubran un rea grande (para tener en cuenta la curvatura
de la Tierra) y con datos distorsionados (por ejemplo, debido a la distorsin del lente de la
cmara). Las transformaciones de tercer orden se usan con fotografas areas distorsionadas, en
escaneos de mapas deformados y con imgenes de radar. Las transformaciones de cuarto orden
pueden usarse en fotografas areas muy distorsionadas.
La matriz de transformacin para una transformacin de orden t contiene este nmero de
coeficientes:
Se multiplica por dos para considerar los dos conjuntos de coeficientesun conjunto para X,
uno para Y.
Una manera ms fcil de llegar al mismo nmero es:
Claramente, el tamao de la matriz de transformacin se incrementa con el orden de la
transformacin.
original image
some possible outputs
2 i
i 1 =
t 1 +
t 1 + ( ) t 2 + ( )
Rectificacin
352 ERDAS
Polinomios de Mayor Orden
Las ecuaciones polinmicas para una transformacin de orden t tienen la siguiente forma:
Donde:
t = el orden del polinomio
a
k
y b
k
= coeficientes
el subndice k en a
k
y b
k
est determinado por:
Un ejemplo de ecuaciones de transformacin de 3er orden para X y Y, usando nmeros, es:
Estas ecuaciones usan un total de 20 coeficientes, o
Efectos de Orden El clculo y la salida de una ecuacin polinmica de alto orden son ms complejos que los de
una ecuacin de bajo orden. Por consiguiente, los polinomios de segundo orden se usan para
realizar rectificaciones de imgenes ms complejas. Para entender los efectos de diferentes
rdenes de transformacin de la rectificacin de imgenes, es til ver la salida de diferentes
rdenes de polinomios.
x
o
t
i o =
\ .
|
|
| |
i
j o =
\ .
|
|
| |
= a
k
x
i j
y
j
y
o
t
i o =
\ .
|
|
| |
i
j o =
\ .
|
|
| |
= b
k
x
i j
y
j
k
i i j +
2
--------------- j + =
x
o
5 4x 6y 10x
2
5xy 1y
2
3x
3
7x
2
y 11xy
2
4y
3
+ + + + + + =
y
o
13 12x 4y 1x
2
21xy 11y
2
1x
3
2x
2
y 5xy
2
12y
3
+ + + + + + + =
3 1 + ( ) 3 2 + ( )
353
Transformacin Polinmica
Field Guide
El siguiente ejemplo usa nicamente una coordenada (X), en lugar de dos (X,Y), como se usa
en los polinomios de rectificacin. Esto permite que usted dibuje grficos bidimensionales que
ilustran la manera en la que los rdenes altos de transformacin afectan la imagen de salida.
NOTA: Como nicamente se usa la coordenada X en estos ejemplos, el nmero de GCPs usado
es menor que el nmero requerido para realizar realmente los diferentes rdenes de
transformacin.
Los coeficientes -como los presentados en este ejemplo- deberan ser calculados generalmente
por el mtodo de regresin de mnimos cuadrados. Suponga que los GCPs se ingresan con estas
coordenadas X:
Estos GCPs permiten una transformacin de 1er orden para las coordenadas X, la cual es
satisfecha por la ecuacin (los coeficientes estn entre parntesis):
Donde:
x
r
= la coordenada X de referencia
x
i
= la coordenada X fuente
Esta ecuacin tiene la misma forma que la ecuacin de una lnea (y = mx + b). En trminos
matemticos, un polinomio de 1er orden es lineal. Por consiguiente, una transformacin de 1er
orden tambin se conoce como transformacin lineal. Esta ecuacin se grafica en la Figura 9-4
en la pgina 353.
Figura 9-4: Ejemplo de Transformacin1er-Orden
Source X Coordinate (input) Reference X Coordinate (output)
1 17
2 9
3 1
x
r
25 ( ) 8 ( ) + x
i
=
0 1 2 3 4
0
4
8
12
16
r
e
f
e
r
e
n
c
e
X
c
o
o
r
d
i
n
a
t
e
source X coordinate
x
r
= (25) + (-8)x
i
Rectificacin
354 ERDAS
Sin embargo, qu pasa si el segundo GCP fuera cambiado como sigue?
Estos puntos son graficados nuevamente en la Figura 9-5 en la pgina 354.
Figura 9-5: Ejemplo de TransformacinSegundo GCP Cambiado
Una lnea no puede conectar estos puntos, lo cual ilustra que ellos no pueden ser expresados por
un polinomio de 1er orden, como el de arriba. En este caso, una ecuacin polinmica de segundo
orden expresa estos puntos.
Los polinomios de segundo orden o de mayor orden no son lineales. El grfico de esta curva es
dibujado en la Figura 9-6 en la pgina 354.
Figura 9-6: Ejemplo de Transformacin de Segundo Orden
Source X Coordinate (input) Reference X Coordinate (output)
1 17
2 7
3 1
0 1 2 3 4
0
4
8
12
16
r
e
f
e
r
e
n
c
e
X
c
o
o
r
d
i
n
a
t
e
source X coordinate
x
r
31 ( ) 16 ( )x
i
2 ( )x
i
2
+ + =
0 1 2 3 4
0
4
8
12
16
r
e
f
e
r
e
n
c
e
X
c
o
o
r
d
i
n
a
t
e
source X coordinate
x
r
= (31) + (-16)x
i
+ (2)x
i
2
355
Transformacin Polinmica
Field Guide
Qu pasa si un GCP adicional fuera agregado a la lista?
Figura 9-7: Ejemplo de TransformacinCuarto GCP Anadido
Como se ilustra en la Figura 9-7 en la pgina 355, este cuarto GCP no ajusta en la curva de la
ecuacin polinmica de segundo orden. Parfa asegurar que todos los GCPs ajustan, el orden de
la transformacin debera ser incrementado a tercer orden. La ecuacin y el grfico de la Figura
9-8 en la pgina 355 seran entonces los resultados.
Figura 9-8: Ejemplo de TransformacinTercer Order
Source X Coordinate (input) Reference X Coordinate (output)
1 17
2 7
3 1
4 5
0 1 2 3 4
0
4
8
12
16
r
e
f
e
r
e
n
c
e
X
c
o
o
r
d
i
n
a
t
e
source X coordinate
x
r
= (31) + (-16)x
i
+ (2)x
i
2
(4,5)
0 1 2 3 4
0
4
8
12
16
r
e
f
e
r
e
n
c
e
X
c
o
o
r
d
i
n
a
t
e
source X coordinate
x
r
= (25) + (-5)x
i
+ (-4)x
i
2
+ (1)x
i
3
Rectificacin
356 ERDAS
La Figura 9-8 en la pgina 355 ilustra una transformacin de tercer orden. Sin embargo, esta
ecuacin puede ser innecesariamente compleja. La ejecucin de una transformacin de
coordenadas con esta ecuacin puede causar distorsiones no deseadas en la imagen de salida por
pretender un ajuste perfecto para todos los GCPs. En este ejemplo, una transformacin de tercer
orden probablemente sera demasiado alta, porque los pixeles de salida seran organizados en
un orden diferente que los pixeles de entrada, en la direccin X.
Figure 9-9: Ejemplo de TransformacinEfecto de una transformacin de tercer orden
En este caso, un mayor orden de transformacin probablemente no producir los resultados
deseados.
Nmero Mnimo de
GCPs
Los rdenes altos de transformacin pueden ser usados para corregir tipos de distorsin ms
complicados. Sin embargo, para usar un orden alto de transformacin se requieren ms GCPs.
Por consiguiente, para realizar una transformacin de primer orden, que est expresada por la
ecuacin de un plano, se requieren por lo menos 3 GCPs. De manera similar, la ecuacin usada
en una transformacin de segundo orden es la ecuacin de un paraboloide. Se requieren seis
puntos para para definir un paraboloide. Por consiguiente, se requiere un mnimo de seis GCPs
para realizar una transformacin de segundo orden. El nmero mnimo de puntos requeridos
para realizar una transformacin de orden t es:
Source X Coordinate (input) Reference X Coordinate (output)
1 x
o
(1) = 17
2 x
o
(2) = 7
3 x
o
(3) = 1
4 x
o
(4) = 5
x
o
1 ( ) x
o
2 ( ) x
o
4 ( ) x
o
3 ( ) > > >
17 7 5 1 > > >
1 2 3 4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
1 2 3 4
3 4 2 1
input image
X coordinates
output image
X coordinates
t 1 + ( ) t 2 + ( ) ( )
2
-------------------------------------
357
Rubber Sheeting
Field Guide
Use ms puntos que el nmero mnimo de GCPs siempre que sea posible. Aunque es posible
conseguir un ajuste perfecto, ello es poco comn, no importa cuntos GCPs se usen.
Para transformaciones entre 1 y n rdenes, el nmero mnimo de GCPs requeridos para realizar
una transformacin se indica en la tabla siguiente:
Para los mejores resultados de rectificacin, usted debe usar siempre un nmero de GCPs mayor
que el mnimo, y ellos deben estar bien distribuidos.
Rubber Sheeting
Anlisis de
Elementos Finitos
Basado en
Tringulos
El anlisis de elementos finitos es una herramienta poderosa para resolver problemas de clculo
complicados que pueden ser examinados en pedazos pequeos ms simples. Se ha usado como
una tcnica de interpolacin local en aplicaciones geogrficas. Para rectificacin de imgenes,
los puntos de control conocidos pueden ser triangulados en muchos tringulos. Cada tringulo
tiene tres puntos de control como sus vrtices. Luego, la transformacin polinmica puede ser
usada para establecer relaciones matemticas entre los sistemas fuente y destino para cada
tringulo. Como la transformacin pasa exactamente a travs de cada punto de control y no lo
hace de manera uniforme, el anlisis de elementos finitos tambin se conoce como rubber
sheeting. Tambin puede llamarse rectificacin basada en tringulos porque la transformacin
y el remuestreo para la rectificacin de la imagen son realizados tringulo a tringulo.
Esta tcnica basada en tringulos debera usarse cuando otros mtodos de rectificacin tales
como la transformacin polinmica y el modelamiento fotogramtrico no pueden producir
resultados aceptables.
Tabla 9-1: Nmero de GCPs por Orden de Transformacin
Order of Transformation Minimum GCPs Required
1 3
2 6
3 10
4 15
5 21
6 28
7 36
8 45
9 55
10 66
Rectificacin
358 ERDAS
Triangulacin Para realizar una rectificacin basada en tringulos, es necesario triangular los puntos de control
en un malla de tringulos. Watson (1992) hizo un resumen de cuatro clases de triangulacin,
incluyendo arbitraria, ptima, Greedy y Delaunay triangulation. De las cuatro clases, la
triangulacin Delaunay es la ms usada y es adoptada debido a que las variaciones de ngulo de
los tringulos resultantes es ms pequea.
La triangulacin Delaunay puede ser construida mediante el criterio de la circunferencia vaca.
La circunferencia formada a partir de los tres puntos de cualquier tringulo no debe tener ningn
otro punto adentro. Los tringulos definidos de esta manera son los ms equiangulares posibles.
La Figura 9-10 en la pgina 358 muestra un ejemplo de la red de tringulos formada por 13
puntos de control.
Figura 9-10: Red de Tringulos
Rectificacin
Basada en
Tringulos
Luego que se ha generado una malla triangular y est disponible el orden espacial de los puntos
de control, la rectificacin geomtrica puede ser realizada tringulo a tringulo. Este mtodo
basado en tringulos es atractivo porque divide la regin entera en subconjuntos ms pequeos.
Si el problema geomtrico de la regin entera es muy complicado, la geometra de cada
subconjunto puede ser mucho ms simple y modelada a travs de transformaciones simples.
Para cada tringulo, los polinomios se pueden usar como la forma de transformacin general
entre los sistemas fuente y destino.
Transformacin
Lineal
La ms fcil y rpida es la transformacin lineal con los polinomios de primer orden:
p0
p3
p8
p10
p11
p4
p1
p12
p7
p6
p2
p5
p9
xo a
0
a
1
x a
2
y + + =
yo b
0
b
1
x b
2
y + + =
359
Error RMS
Field Guide
No hay necesidad de informacin extra porque existen tres condiciones conocidas en cada
tringulo y tres coeficientes desconocidos para cada polinomio.
Transformacin No
Lineal
An cuando la transformacin lineal es fcil y rpida, tiene una desventaja. La transicin entre
tringulos no siempre es suave. Este fenmeno es obvio cuando se derivan curvas de nivel o
relieve sombreado de DEM que se han generado usando rubber sheeting. Ello se debe a la
incorporacin del cambio de pendiente de los datos de control en los ejes y vrtices de los
tringulos. Con el fin de distribuir los cambios de pendiente de manera suave entre los
tringulos, la transformacin no lineal con un orden polinmico mayor que uno, se usa
considerando la informacin de gradiente.
Una transformacin polinmica quntica o de quinto orden se escoge aqu como tcnica de
rubber sheeting en esta disertacin. Ella es una funcin suave. La funcin de transformacin y
su derivada parcial de primer orden son continuas. No es difcil construirlas (Akima 1978). La
formulacin es simplemente la siguiente:
la cual tiene 21 coeficientes por cada polinomio que deben ser determinados. Para encontrar
estas incgnitas, deben estar disponibles 21 condiciones. Para cada vrtice del tringulo, se tiene
el valor de un punto, y se pueden obtener fcilmente dos derivadas parciales de primer orden y
tres de segundo orden usando vrtices en la vecindad del vrtice. Entonces, se tienen 18
condiciones listas para ser usadas. Tres condiciones adicionales se pueden obtener asumiendo
que la derivada parcial normal en cada eje del tringulo es un polinomio cbico, lo cual significa
que la suma de los items del polinomio ms all del tercer orden en la derivada parcial normal
tiene un valor de cero.
Anlisis de Puntos
de Chequeo
Debe enfatizarse que el anlisis de puntos de chequeo independientes es crtico para determinar
la exactitud del modelamiento rubber sheeting. Para un mtodo de modelamiento exacto como
rubber sheeting, los puntos de control terrestre, que son usados en el proceso de modelamiento,
no existen residuales geomtricos significativos. Para evaluar la transformacin geomtrica
entre los sistemas de coordenadas fuente y destino, se recomienda la evaluacin de la exactitud
usando puntos de chequeo independientes.
Error RMS El error RMS es la distancia entre la posicin de entrada (fuente) de un GCP y la posicin
retransformada del mismo GCP. En otras palabras, es la diferencia entre la coordenada de salida
deseada y la coordenada de salida real para el mismo punto, cuando el punto es transformado
con la transformacin geomtrica.
El error RMS es calculado con una ecuacin de distancia.
xo a
k
x
i j
y
j
j 0 =
i
i 0 =
5
=
yo b
k
x
i j
y
j
j 0 =
i
i 0 =
5
Rectificacin
360 ERDAS
Donde:
x
i
e y
i
= las coordenadas fuente de entrada
x
r
e y
r
= las coordenadas retransformadas
El error RMS se expresa como distancia en el sistema de coordenadas fuente. Si las coordenadas
del archivo de los datos son las coordenadas fuente, entonces el error RMS es una distancia en
unidades de pixel. Por ejemplo, un error RMS de 2 significa que el pixel de referencia est 2
pixeles lejos del pixel retransformado.
Residuales y Error
RMS por GCP
La herramienta GCP Tool contiene columnas para los residuales X y Y. Los residuales son las
distancias entre las coordenadas fuente y las coordenadas retransformadas, en una direccin.
Ellas se muestran para cada GCP. El residual X es la distancia entre la coordenada X fuente y
la coordenada X retransformada. El residual Y es la distancia entre la coordenada Y fuente y la
coordenada Y retransformada.
Si los GCPs estn consistentemente desplazadados, sea en la direccin X o en la direccin Y,
se deben agregar ms puntos en esa direccin. Este es un problema comn en datos fuera del
nadir.
Error RMS por GCP
El error RMS de cada punto es reportado para ayudar a evaluar los GCPs. Este se calcula con
una frmula de distancia:
Donde:
R
i
= el error RMS para GCPi
XR
i
= el residual X para GCPi
YR
i
= el residual Y para GCPi
La Figura 9-11 en la pgina 361 ilustra la relacin entre los residuales y el error RMS por punto.
RMS error x
r
x
i
( )
2
y
r
y
i
( )
2
+ =
R
i
XR
i
2
YR
i
2
+ =
361
Error RMS
Field Guide
Figura 9-11: Los Residuales y el Error RMS por Punto
Error RMS Total A partir de los residuales, se realizan los siguientes clculos para determinar el error total RMS,
el error RMS X y el error RMS Y.
Donde:
R
x
= error RMS X
R
y
= error RMS Y
T = error RMS total
n = nmero de GCPs
i = nmero del GCP
XR
i
= residual X para el GCPi
YR
i
= residual Y para el GCPi
source GCP
retransformed GCP
RMS error
X residual
Y residual
R
x
1
n
---
XR
i
2
i 1 =
n
=
R
y
1
n
--- YR
i
2
i 1 =
n
=
T R
x
2
R
y
2
+ =
or
1
n
--- XR
i
2
YR
i
2
+
i 1 =
n
Rectificacin
362 ERDAS
Contribucin del
Error por Punto
Un valor normalizado que representa el error RMS de cada punto en relacin al error RMS total
tambin es reportado. Este valor es listado en la columna Contribution de la herramienta GCP
Tool.
Donde:
E
i
= contribucin al error del punto GCP
i
R
i
= error RMS para GCP
i
T = error RMS total
Tolerancia del Error
RMS
En la mayora de los casos, es ventajoso tolerar una cierta cantidad de error en lugar de realizar
una transformacin compleja. La cantidad de error RMS que es tolerada puede ser imaginada
como una ventana alrededor de cada coordenada fuente, dentro de la cual una coordenada
retransformada se considera correcta (es decir, suficientemente cercana). Por ejemplo, si la
tolerancia de error es 2, entonces el pixel retransformado puede estar 2 pixles lejos del pixel
fuente y an se considera exacto.
Figura 9-12: Tolerancia de Error RMS
El error RMS aceptable est determinado por el uso final de la base de datos, el tipo de datos
que se est usando y los datos histricos usados. Por ejemplo, los GCPs adquiridos con GPS
deberan tener una exactitud de unos 10 m, pero los GCPs tomados de mapas a escala 1:24,000
deberan tener una exactitud de unos 20 m.
Es importante recordar que el error RMS es reportado en pixeles. Por consiguiente, si usted est
rectificando datos Landsat TM y desea que la rectificacin sea exacta en un rango mximo de
30 metros, el error RMS no debera ser mayor de 1.00. La exactitud aceptable depende del rea
de la imagen y de cada proyecto particular.
Evaluacin del Error
RMS
Para determinar el orden de la transformacin polinmica, usted puede evaluar la distorsin
relativa yendo de la imagen al mapa o del mapa al mapa. Uno debera empezar con una
transformacin de primer orden a menos que sepa que ella no funciona bien. Es posible calcular
repetidamente las matrices de transformacin hasta que se alcance un error RMS aceptable.
E
i
R
i
T
----- =
2 pixel RMS error tolerance
(radius)
source
pixel
Retransformed coordinates
within this range are considered
correct
363
Mtodos de Remuestreo
Field Guide
La mayora de las rectificaciones son de primer o de segundo orden. El peligro de usar
rectificaciones de orden superior es que entre ms complicada sea la ecuacin de la
transformacin, menos regulares y predecibles son los resultados. Intentar ajustar todos
los GCPs, puede significar mucha distorsin en la imagen.
Despus de cada clculo de una transformacin y de un error RMS, existen cuatro opciones:
Eliminar el GCP con el error RMS ms alto, asumiendo que este GCP es el menos exacto.
Otra transformacin puede entonces ser calculada a partir de los GCPs restantes. Un ajuste
ms cercano debera ser posible. Sin embargo, si este es el nico GCP en una regin
particular de la imagen, removerlo puede causar errores ms grandes.
Tolerar una mayor cantidad de error RMS.
Incrementar la complejidad de la transformacin, creando alteraciones geomtricas ms
complejas en la imagen. Luego, se puede calcular una transformacin que pueda acomodar
los GCPs con un error menor.
Seleccione nicamente los puntos en los cuales usted tiene ms confianza.
Mtodos de
Remuestreo
El siguiente paso en el proceso de rectificacin/registro es crear el archivo de salida. Dado que
la grilla (cuadrcula) de pixeles en imagen fuente pocas veces coincide con la grilla de la imagen
de referencia, los pixeles son remuestreados de tal manera que se puedan calcular los nuevos
niveles digitales para el archivo de salida.
Figura 9-13: Remuestreo
1. The input image with
source GCPs.
2. The output grid, with
reference GCPs shown.
3. To compare the two grids, the
input image is laid over the
output grid, so that the GCPs
of the two grids fit together.
4. Using a resampling method,
the pixel values of the input
image are assigned to pixels
in the output grid.
GCP
GCP
GCP
GCP
Rectificacin
364 ERDAS
Los siguientes mtodos de remuestreo estn soportados en ERDAS IMAGINE:
Vecino ms cercanousa el valor del pixel ms cercano para asignar el valor del pixel de
salida.
Interpolacin bilinealusa los niveles digitales de cuatro pixeles en una ventana de 2 2
para calcular un valor de salida con una funcin bilineal.
Convolucin cbicausa los niveles digitales de 16 pixeles en una ventana de 4 4 para
calcular el valor de salida con una funcin cbica.
En todos los mtodos, el nmero de filas y de columnas en la salida se calcula a partir de las
dimensiones del mapa de salida, las cuales son determinadas por la transformacin geomtrica
y el tamao de la celda. Las esquinas de salida (superior izquierda e inferior derecha) del archivo
de salida se pueden especificar. Los valores default se calculan de tal manera que el archivo
fuente completo es remuestreado al archivo destino.
Si se est realizando una rectificacin imagen a imagen, puede ser benfico especificar las
esquinas de salida relativas al sistema del archivo de referencia, de manera tal que las imgenes
sean co-registradas. En este caso, las coordenadas X,Y de la esquina superior izquierda son 0,
0 y no los valores default.
Si las unidades de salida son pixeles, entonces el origen de la imagen es la esquina
superior izquierda. De otra manera, el origen es la esquina inferior izquierda.
Rectificacin a
Lat/Lon
Usted puede especificar el tamao de celda nominal si el sistema de coordenadas de salida es
Lat/Lon. El tamao de la celda de salida para una proyeccin geogrfica (p. e., Lat/Lon) est
siempre en unidades angulares de grados decimales. Sin embargo, si usted desea que la celda
tenga un tamao especfico en metros, usted puede ingresar metros y calcular el tamao
equivalente en grados decimales. Por ejemplo, si usted desea que el tamao de celda del archivo
de salida sea 30 30 metros, entonces el programa calcula cul sera ese tamao en grados
decimales y automticamente actualizara el tamao de la celda de salida. Como la
transformacin entre medidas angulares (grados decimales) y nominales (metros) vara a travs
de la imagen, la transformacin se basa en el centro del archivo de salida.
Entre el tamao de celda nominal en el dilogo Nominal Cell Size.
Vecino Ms Cercano Para determinar el pixel de salida ms cercano, las coordenadas rectificadas (x
o
,y
o
) del pixel son
retransformadas al sistema de coordenadas fuente usando la inversa de la transformacin. Las
coordenadas retransformadas (x
r
,y
r
) son usadas en la interpolacin bilineal y en la convolucin
cbica tambin. El pixel que est ms cercano a las coordenadas retransformadas (x
r
,y
r
) es el
vecino ms cercano. Los niveles digitales de ese pixel se convierten en los niveles digitales de
la imagen de salida.
365
Mtodos de Remuestreo
Field Guide
Figura 9-14: Vecino Ms Cercano
Interpolacin
Bilineal
En interpolacin bilineal, el nivel digital del pixel rectificado se basa en las distancias entre la
posicin de la coordenada retransformada (x
r
,y
r
) y los cuatro pixeles mas cercanos en la imagen
de entrada (fuente) (ver Figura 9-15 en la pgina 366). En este ejemplo, los pixeles vecinos son
numerados 1, 2, 3 y 4. Dados los niveles digitales de estos cuatro pixeles en una grilla, la tarea
es calcular un nivel digital para r (V
r
).
Tabla 9-2: Remuestro del Vecino ms Cercano
Advantages Disadvantages
Transfers original data values without averaging
them as the other methods do; therefore, the
extremes and subtleties of the data values are not
lost. This is an important consideration when
discriminating between vegetation types, locating
an edge associated with a lineament, or
determining different levels of turbidity or
temperatures in a lake (Jensen 1996).
When this method is used to resample from a
larger to a smaller grid size, there is usually a
stair stepped effect around diagonal lines and
curves.
Suitable for use before classification. Data values may be dropped, while other values
may be duplicated.
The easiest of the three methods to compute and
the fastest to use.
Using on linear thematic data (e.g., roads, streams)
may result in breaks or gaps in a network of linear
data.
Appropriate for thematic files, which can have
data file values based on a qualitative (nominal or
ordinal) system or a quantitative (interval or ratio)
system. The averaging that is performed with
bilinear interpolation and cubic convolution is not
suited to a qualitative class value system.
(x
r
,y
r
)
nearest to
(x
r
,y
r
)
Rectificacin
366 ERDAS
Figura 9-15: Interpolacin Bilineal
Para calcular V
r
, primero se deben considerar V
m
y V
n
. Interpolando V
m
y V
n
, usted puede
realizar una interpolacin lineal que es un proceso simple de ilustrar. Si los niveles digitales son
ploteados en una grfico relacionando las distancias entre ellos, es clara la interpolacin lineal.
El nivel digital de m (V
m
) es una funcin del cambio en el nivel digital entre los pixeles 3 and 1
(es decir, V
3
- V
1
).
Figura 9-16: Interpolacin Lineal
(x
r
,y
r
)
1 2
3 4
m r n
dy
dx
D
r is the location of the retransformed coordinate
V
3
V
m
V
1
(V
3
-
V
1
) / D
Y
1
Y
m
Y
3
D
data file coordinates
d
a
t
a
f
i
l
e
v
a
l
u
e
s
(Y)
Calculating a data file value as a function
of spatial distance between two pixels
367
Mtodos de Remuestreo
Field Guide
La ecuacin para calcular V
m
a partir de V
1 y
V
3
es:
Donde:
Y
i
= la coordenada Y del pixel
i
V
i
= el nivel digital del pixel
i
dy = la distancia entre Y
1
y Y
m
en el sistema de coordenadas fuente
D = la distancia entre Y
1
y Y
3
en el sistema de coordenadas fuente
Si uno considera que (V
3
- V
1
/ D) es la pendiente de la lnea en el grfico de arriba, entonces
esta ecuacin se transforma en la ecuacin de una lnea y = mx + b.
De manera similar, la ecuacin para el clculo del nivel digital para n (V
n
) en la grilla de pixeles
es:
A partir de V
n
y V
m
, el nivel digital de r, que es la posicin de la coordenada retransformada
(x
r
,y
r
), se puede calcular de la misma manera:
La ecuacin siguiente se obtuvo acoplando las ecuaciones para V
m
y V
n
a esta ecuacin final
para V:
En la mayora de los casos D = 1, ya que las coordenadas de archivo de los datos se usan como
coordenadas fuentes y ellas tienen incrementos de 1.
V
m
V
3
V
1
D
------------------
dy V
1
+ =
V
n
V
4
V
2
D
------------------ dy V
2
+ =
V
r
V
n
V
m
D
-------------------- dx V
m
+ =
V
r
V
4
V
2
D
------------------ dy V
2
+
V
3
V
1
D
------------------ dy V
1
+
D
------------------------------------------------------------------------------------------------------- dx
V
3
V
1
D
------------------ dy V
1
+ + =
V
r
V
1
D dx ( ) D dy ( ) V
2
dx ( ) D dy ( ) V
3
D dx ( ) dy ( ) V
4
dx ( ) dy ( ) + + +
D
2
------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ =
Rectificacin
368 ERDAS
Algunas ecuaciones para interpolacin bilineal expresan los niveles digitales de salida como:
Donde:
w
i
= un factor de peso
La ecuacin de arriba podra ser expresada en un formato similar, en el cual el clculo de w
i
es
claro:
Donde:
x
i
= cambio en la direccin X entre (x
r
,y
r
) y la coordenada de archivo de
datos del pixel i
y
i
= cambio en la direccin Y entre (x
r
,y
r
) y la coordenada de archivo de
datos del pixel i
V
i
= el nivel digital del pixel i
D = la distancia entre pixeles (en X o en Y) en el sistema de coordenadas
fuente
Para cada uno de los cuatro pixeles, el nivel digital tiene ms peso si el pixel est ms cercano
a (x
r
,y
r
).
Vea captulo 5 "Realces" para ms informacin sobre filtros de convolucin.
Convolucin Cbica La convolucin cbica es similar a la interpolacin bilineal, excepto que:
Tabla 9-3: Remuestreo de Interpolacin Bilineal
Advantages Disadvantages
Results in output images that are smoother,
without the stair-stepped effect that is possible
with nearest neighbor.
Since pixels are averaged, bilinear interpolation
has the effect of a low-frequency convolution.
Edges are smoothed, and some extremes of the
data file values are lost.
More spatially accurate than nearest neighbor.
This method is often used when changing the cell
size of the data, such as in SPOT/TM merges
within the 2 2 resampling matrix limit.
V
r
w
i
V
i
=
V
r
D x
i
( ) D y
i
( )
D
2
---------------------------------------------- V
i
i 1 =
4
=
369
Mtodos de Remuestreo
Field Guide
un conjunto de 16 pixeles, en un arreglo de 4 4, se promedia para determinar el nivel
digital de salida, y
una aproximacin de funcin cbica, en lugar de lineal, se aplica los 16 valores de entrada.
Para identificar los 16 pixeles en relacin con la coordenada retransformada (x
r
,y
r
), se usa el
pixel (i,j), de manera que.
i = int (x
r
)
j = int (y
r
)
Esto asume que (x
r
,y
r
) est expresado en coordenadas de archivo de datos (pixels). Los pixeles
alrededor (i,j) conforman una grilla de pixeles de entrada de 4 x 4, como se ilustra en la Figura
9-17 en la pgina 369.
Figura 9-17: Convolucin Cbica
Como se usa una funcin cbica, en lugar de una lineal, para dar peso a los 16 pixeles de entrada,
los pixeles ms lejanos de (x
r
,y
r
) tienen exponencialmente menos peso que aquellos que estn
cerca de (x
r
,y
r
).
Diversas versiones de la ecuacin de convolucin cbica son usadas. Las diferentes ecuaciones
tienen diferentes efectos sobre los niveles digitales de salida. Algunas convoluciones pueden ser
similares a un filtro de baja frecuencia (como la interpolacin bilineal) ayudando a promediar y
a suavizar los valores. Otras pueden tender a aumentar la nitidez de la imagen, de manera similar
a un filtro de alta frecuencia. La convolucin cbica usada en ERDAS IMAGINE es un
compromiso entre baja y alta frecuencia. El efecto general de la convolucin cbica depende de
los datos.
La frmula usada en ERDAS IMAGINE es:
(i,j)
(X
r
,Y
r
)
Rectificacin
370 ERDAS
Donde:
i = int (x
r
)
j = int (y
r
)
d(i,j) = distancia entre un pixel con coordenadas (i,j) y (xr,yr)
V(i,j) = el nivel digital del pixel (i,j)
V
r
= el nivel digital de salida
a = -0.5 (una constante que difiere en otras aplicaciones de convolucin
cbica)
f(x) = la siguiente funcin:
Fuente: Atkinson 1985
En la mayora de los casos, un valor de a de -0.5 tiende a producir capas de salida con una media
y una desviacin estndar ms cercana que las de los datos originales (Atkinson 1985).
V
r
V i 1 j n 2 + , ( ) f d i 1 j n 2 + , ( ) 1 + ( )
V i j n 2 + , ( ) f d i j n 2 + , ( ) ( )
V i 1 + j n 2 + , ( ) f d i 1 + j n 2 + , ( ) 1 ( )
V i 2 + j n 2 + , ( ) f d i 2 + j n 2 + , ( ) 2 ( )
+
+
+
n 1 =
4
=
f x ( )
a 2 + ( ) x
3
a 3 + ( ) x
2
1 +
a x
3
5a x
2
2 8a x 4a +
0
\
|
=
if x 1 <
if 1 x 2 < <
otherwise
371
Conversiones de Coordenadas Mapa-a-Mapa
Field Guide
Conversiones de
Coordenadas
Mapa-a-Mapa
Hay muchas veces en las que usted puede necesitar cambiar un mapa que ya est registrado en
una proyeccin plana a otra proyeccin. Algunos ejemplos son los siguientes (ESRI 1992):
cuando se combinan dos mapas con diferentes proyecciones
cuando la proyeccin usada en los archivos de la base de datos no produce las propiedades
deseadas de un mapa
cuando es necesario combinar datos de ms de una zona de una proyeccin, tales como
UTM o State Plane
Un cambio en la proyeccin es un cambio geomtricolas distancias, las reas y la escala son
representadas de manera diferente. Por consiguiente, el proceso de conversin requiere que los
pixeles sean remuestreados.
El remuestreo ocasiona que parte de la integridad espectral de los datos se pierda (vea las
desventajas de los mtodos de remuestreo explicadas previamente). As que, no es muy
aconsejable remuestrear los datos que yan sido remuestreados si la exactitud de los niveles
digitales es importante para la aplicacin. Si los datos no rectificados originales estn
disponibles, es mejor rectificar esos datos a un sistema de proyeccin cartogrfica que perder
una generacin convirtiendo datos rectificados y remuestrendolos por segunda vez.
Proceso de
Conversin
Para converitr el sistema de coordenadas cartogrficas de cualquier imagen goereferenciada,
ERDAS IMAGINE proporciona un atajo al proceso de rectificacin. En este procedimiento, los
GCPs son generados automticamente a lo largo de las intersecciones de una grilla que usted
especifica. El programa calcula las coordenadas de referencia para los GCPs con la frmula de
conversin apropiada y con una transformacin que puede ser usada en el proceso regular de
rectificacin.
Datos Vectoriales La conversin de las coordenadas de mapa de datos vectoriales es mucho ms sencilla que la
conversin de datos raster. Como los datos vectoriales son almacenados mediante las
coordenadas de los nodos, cada coordenada es simplemente convertida usando la frmula de
conversin apropiada. No existen coordenadas entre los nodos que requieran ser extrapoladas.
Tabla 9-4: Remuestro de Convolucin Cbica
Advantages Disadvantages
Uses 4 4 resampling. In most cases, the mean
and standard deviation of the output pixels match
the mean and standard deviation of the input pixels
more closely than any other resampling method.
Data values may be altered.
The effect of the cubic curve weighting can both
sharpen the image and smooth out noise (Atkinson
1985). The actual effects depend upon the data
being used.
The most computationally intensive resampling
method, and is therefore the slowest.
This method is recommended when you are
dramatically changing the cell size of the data,
such as in TM/aerial photo merges (i.e., matches
the 4 4 window more closely than the 2 2
window).
Rectificacin
372 ERDAS
Potrebbero piacerti anche
- Procedimiento Escrito de Trabajo Seguro-TopografiaDocumento7 pagineProcedimiento Escrito de Trabajo Seguro-TopografiaMarlon Torres TerronesNessuna valutazione finora
- 10.perdidas de Presion Por ChoqueDocumento6 pagine10.perdidas de Presion Por ChoqueMarlon Torres TerronesNessuna valutazione finora
- Memanual2004 MILPODocumento73 pagineMemanual2004 MILPOMiguel Ulises Aquino JaveNessuna valutazione finora
- 2 Georeferencia CadDocumento1 pagina2 Georeferencia CadMarlon Torres TerronesNessuna valutazione finora
- Trabajo Ya Echo Plan de Manejo Ambiental2Documento31 pagineTrabajo Ya Echo Plan de Manejo Ambiental2Marlon Torres TerronesNessuna valutazione finora
- Geologia PDFDocumento90 pagineGeologia PDFMarlon Torres TerronesNessuna valutazione finora
- DISTRIBUCION-BINOMIAL FinalDocumento16 pagineDISTRIBUCION-BINOMIAL FinalJesus BarbozaNessuna valutazione finora
- Matematica Aplicada A La Ingenieria PDFDocumento4 pagineMatematica Aplicada A La Ingenieria PDFARLENA BRACHONessuna valutazione finora
- Final Finanzas y Contabilidad Uc3m 2015Documento6 pagineFinal Finanzas y Contabilidad Uc3m 2015Paula Rosado JiménezNessuna valutazione finora
- Lab 5 Aplicaciones de La Integral Con MatlabDocumento5 pagineLab 5 Aplicaciones de La Integral Con MatlabAlexander Victor Esmith Ramos NinaNessuna valutazione finora
- Estadistica 2Documento37 pagineEstadistica 2Jeam pool Chacchi guzmanNessuna valutazione finora
- Gía N.5. Inecuaciones y Valor AbsolutoDocumento6 pagineGía N.5. Inecuaciones y Valor AbsolutoEsteban FlorezNessuna valutazione finora
- Fenómenos de TransferenciaDocumento5 pagineFenómenos de TransferenciaDeivis MuñozNessuna valutazione finora
- LinealesDocumento25 pagineLinealessantiagoNessuna valutazione finora
- Examen Polinomios3eso3 PDFDocumento3 pagineExamen Polinomios3eso3 PDFMari Zadi NorimeNessuna valutazione finora
- Proyecciones Geograficas.Documento2 pagineProyecciones Geograficas.DylanViloriaPreteltNessuna valutazione finora
- Resumen de La Sección C.1 de GujaratiDocumento3 pagineResumen de La Sección C.1 de GujaratiSOFIA ITZAYANNI ORTIZ DIAZNessuna valutazione finora
- Interpolacion y Ajuste de Curvas PDFDocumento5 pagineInterpolacion y Ajuste de Curvas PDFJesse MauricioNessuna valutazione finora
- Analisis MultivariadoDocumento37 pagineAnalisis MultivariadoPablo Aguirre100% (1)
- La Ley de Los SignosDocumento5 pagineLa Ley de Los SignosImnova TecNessuna valutazione finora
- Comprobacion de Lectura 6 Parte 2Documento10 pagineComprobacion de Lectura 6 Parte 2jesus oliveraNessuna valutazione finora
- Identidades TrigonométricasDocumento2 pagineIdentidades Trigonométricasedosal2Nessuna valutazione finora
- Trabajo Colaborativo Unidad 1 Tarea 1Documento26 pagineTrabajo Colaborativo Unidad 1 Tarea 1john morenoNessuna valutazione finora
- Ejercicios 1 Mat20 PDFDocumento6 pagineEjercicios 1 Mat20 PDFLouis VitaleNessuna valutazione finora
- Monografia Final Calculo IIDocumento10 pagineMonografia Final Calculo IIMaria Victoria BurgosNessuna valutazione finora
- VectoresDocumento3 pagineVectoresElias RuizNessuna valutazione finora
- Sesión 10 - GmiDocumento14 pagineSesión 10 - GmiNathaly BalbuenaNessuna valutazione finora
- Repaso Parcial 2Documento14 pagineRepaso Parcial 2Jon AloNessuna valutazione finora
- Trabajo de Campo #04 - Grupo #4Documento20 pagineTrabajo de Campo #04 - Grupo #4Wilder Daniel Ramos CastrejonNessuna valutazione finora
- Apuntes 2 Espad 1 Parte Temas 1 2 y 3Documento12 pagineApuntes 2 Espad 1 Parte Temas 1 2 y 3Miriam Galán HumanesNessuna valutazione finora
- Hoja de Tarea No 4. Matematica II Sucesiones y Series. Seccion A y B Año 2021Documento1 paginaHoja de Tarea No 4. Matematica II Sucesiones y Series. Seccion A y B Año 2021SaralouFernandezNessuna valutazione finora
- SOLUCIÓNCC2Documento4 pagineSOLUCIÓNCC2Maria Fernanda Campana AguilarNessuna valutazione finora
- 1b3C Calculo DiferencialDocumento2 pagine1b3C Calculo DiferencialGutiérrez Méndez Carla PatriciaNessuna valutazione finora
- Yosber Guerrero - Matemática I - Actividad Sumativa 2Documento14 pagineYosber Guerrero - Matemática I - Actividad Sumativa 2Emmanuel GuerreroNessuna valutazione finora
- Teoria de Estabilidad y Control PDFDocumento140 pagineTeoria de Estabilidad y Control PDFAntoniojuarezjuarez100% (2)
- Espinosa Valladares Juan PabloDocumento2 pagineEspinosa Valladares Juan PabloJuanNessuna valutazione finora