Potrebbero piacerti anche
- Terminos de Referencia - TECHODocumento12 pagineTerminos de Referencia - TECHOedwinNessuna valutazione finora
- FormaDocumento10 pagineFormamacamacarronNessuna valutazione finora
- PreguntasDocumento8 paginePreguntasLuis Jose GarciaNessuna valutazione finora
- Informe Curva de BombaDocumento8 pagineInforme Curva de BombaLuisMuñozNessuna valutazione finora
- Definición: Rubro: Aass-001 Excavación de Zanja para Tuberias Y Camaras de VálvulasDocumento263 pagineDefinición: Rubro: Aass-001 Excavación de Zanja para Tuberias Y Camaras de VálvulasEmma Luisa Jatar DiazNessuna valutazione finora
- Reglamento Interno Del Taller MecánicoDocumento1 paginaReglamento Interno Del Taller MecánicoSilvia Donaji Marin VicenteNessuna valutazione finora
- ID Del Documento 2206061Documento3 pagineID Del Documento 2206061Harold EncantoNessuna valutazione finora
- Curriculum 3Documento5 pagineCurriculum 3BUSTAMANTE GUERRERO FernandoNessuna valutazione finora
- Informe Corte DirectoDocumento19 pagineInforme Corte DirectoGR JossNessuna valutazione finora
- Practica 5 - Ley de OhmDocumento7 paginePractica 5 - Ley de OhmNICOLE ZULETA MARTINEZNessuna valutazione finora
- Para UrbanismoDocumento7 paginePara UrbanismoJuan Up Rojas RemigioNessuna valutazione finora
- Bridas y AnillosDocumento26 pagineBridas y AnillosJose Gabriel Hernandez Felix100% (1)
- Quiz 1 Procesos Industriales 2Documento3 pagineQuiz 1 Procesos Industriales 2Juvenal Córdoba ValoyesNessuna valutazione finora
- Cuentas Bancarias SolucionDocumento10 pagineCuentas Bancarias SolucionJoel Riveros SalinasNessuna valutazione finora
- Linea Del Tiempo de Lenguajes de ProgramaciónDocumento2 pagineLinea Del Tiempo de Lenguajes de ProgramaciónHugo Hernandez Vela SuarezNessuna valutazione finora
- Apuntes ElectromagnetismoDocumento9 pagineApuntes ElectromagnetismoEfraín de la CruzNessuna valutazione finora
- Marce2021,+120 04 IyU 06 1 MuñozDocumento13 pagineMarce2021,+120 04 IyU 06 1 Muñozvaleska BencomoNessuna valutazione finora
- Laje Ebanisteria Y Tapizado-Ceac-1991Documento201 pagineLaje Ebanisteria Y Tapizado-Ceac-1991Paulo Geraldes100% (6)
- Ante-Proyecto 1 SemestreDocumento6 pagineAnte-Proyecto 1 SemestreJuan Felipe AlvaradoNessuna valutazione finora
- Practica No.3Documento5 paginePractica No.3Odin Aguiar ArellanoNessuna valutazione finora
- Molibdatos y WolframatosDocumento8 pagineMolibdatos y WolframatosJonathan BriceñoNessuna valutazione finora
- 02ambiente de Desarrollo PowerbuilderDocumento23 pagine02ambiente de Desarrollo PowerbuilderKaren Jovana Dioses GonzalesNessuna valutazione finora
- Economia Instalacion y Durabilidad en Sistemas de SaneamientoDocumento1 paginaEconomia Instalacion y Durabilidad en Sistemas de SaneamientoMauricioNessuna valutazione finora
- Amplificador Diferencial Con Fuente de CorrienteDocumento11 pagineAmplificador Diferencial Con Fuente de CorrienteFernando Her R100% (2)
- Utilizacion de Metodologias de Inteligencia Artificial y Sus Aplicaciones en El Salvador PDFDocumento12 pagineUtilizacion de Metodologias de Inteligencia Artificial y Sus Aplicaciones en El Salvador PDFElias PalaciosNessuna valutazione finora
- Informe de Verificación Técnica Municipal (Pérgola) #39Documento5 pagineInforme de Verificación Técnica Municipal (Pérgola) #39Ruben Flores YucraNessuna valutazione finora
- NT-CR-F07 Declaración de Confidencialidad Auditorias 20201214Documento3 pagineNT-CR-F07 Declaración de Confidencialidad Auditorias 20201214Jose RomeroNessuna valutazione finora
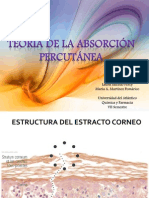
- Expocición Teoria de La Absorcion PercutaneaDocumento28 pagineExpocición Teoria de La Absorcion Percutaneagoldengirl-andy100% (1)
- Examen Tema 5 Community ManagerDocumento10 pagineExamen Tema 5 Community ManagervvNessuna valutazione finora
- 11 Script BDEmpleadosDocumento2 pagine11 Script BDEmpleadosFrank PerezNessuna valutazione finora