Potrebbero piacerti anche
- Unpriced Proposed Renovation of Bugolobi Flat, Block C For Uganda Coffee Development AuthorityDocumento39 pagineUnpriced Proposed Renovation of Bugolobi Flat, Block C For Uganda Coffee Development AuthoritynicolasNessuna valutazione finora
- Short CKT Force in IPBDocumento5 pagineShort CKT Force in IPBRavishankar.AzadNessuna valutazione finora
- Upsa Y5 2023Documento8 pagineUpsa Y5 2023Faizal AzrinNessuna valutazione finora
- Modelling and Eigen Frequency Analysis of Piezoelectric Cantilever BeamDocumento8 pagineModelling and Eigen Frequency Analysis of Piezoelectric Cantilever BeamTI Journals PublishingNessuna valutazione finora
- Answer Set 5 - Fall 2009Documento38 pagineAnswer Set 5 - Fall 2009zachNessuna valutazione finora
- Eddy CurrentsDocumento11 pagineEddy CurrentsIban Barrutia Inza0% (1)
- Power Transformer Winding Model For Lightning Impulse Testing PDFDocumento8 paginePower Transformer Winding Model For Lightning Impulse Testing PDFalex696Nessuna valutazione finora
- Differential Forms on Electromagnetic NetworksDa EverandDifferential Forms on Electromagnetic NetworksValutazione: 4 su 5 stelle4/5 (1)
- Laser Processing of Materials MANNADocumento68 pagineLaser Processing of Materials MANNAfuratnajjarNessuna valutazione finora
- Project Report - Performance Anaylysis of Mutual Funds in IndiaDocumento52 pagineProject Report - Performance Anaylysis of Mutual Funds in Indiapankaj100% (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDa EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlValutazione: 5 su 5 stelle5/5 (1)
- Historic Trial of Ali Brothers and Shankaracharya-1921Documento276 pagineHistoric Trial of Ali Brothers and Shankaracharya-1921Sampath Bulusu100% (3)
- My Initial Action Research PlanDocumento3 pagineMy Initial Action Research PlanKarl Kristian Embido100% (8)
- International Journal of Machine Tools & Manufacture: Guojun Zhang, Zhi Chen, Zhen Zhang, Yu Huang, Wuyi Ming, He LiDocumento13 pagineInternational Journal of Machine Tools & Manufacture: Guojun Zhang, Zhi Chen, Zhen Zhang, Yu Huang, Wuyi Ming, He LiÐɤ Suman ChatterjeeNessuna valutazione finora
- Articol 9Documento6 pagineArticol 9Constantin DorinelNessuna valutazione finora
- Characterizing The Effects of Micro Electrical DisDocumento6 pagineCharacterizing The Effects of Micro Electrical DisNguyễn Hữu PhấnNessuna valutazione finora
- 22 - M. Abdel-SalamDocumento14 pagine22 - M. Abdel-SalamiisteNessuna valutazione finora
- 001 Ieee-Tas 12-10-2019Documento11 pagine001 Ieee-Tas 12-10-2019AMIR KHANNessuna valutazione finora
- Investigation On Material Removal Rate of Al + 6% B C MMC in Wire Electrical Discharge Machining ProcessDocumento7 pagineInvestigation On Material Removal Rate of Al + 6% B C MMC in Wire Electrical Discharge Machining Processshanjuneo17Nessuna valutazione finora
- Confers PDFDocumento7 pagineConfers PDFshanjuneo17Nessuna valutazione finora
- Comb Drive PDFDocumento9 pagineComb Drive PDFS PERSIS ALEXNessuna valutazione finora
- Regular Paper Impact of Mechanical Forces in A 25ka Current Injection TransformerDocumento14 pagineRegular Paper Impact of Mechanical Forces in A 25ka Current Injection TransformerConstantin DorinelNessuna valutazione finora
- CNC Wire-Cut Parameter Optimized Determination of The Stair Shape WorkpieceDocumento6 pagineCNC Wire-Cut Parameter Optimized Determination of The Stair Shape Workpiecegargsumit107Nessuna valutazione finora
- Design and Modelling of ECM Rifling ToolDocumento5 pagineDesign and Modelling of ECM Rifling Tooldavid2404100% (2)
- Computation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodDocumento4 pagineComputation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodmehdivinciNessuna valutazione finora
- Dr. M.A. Mueller, Dr. J.R. Bumby and Prof. E. SpoonerDocumento6 pagineDr. M.A. Mueller, Dr. J.R. Bumby and Prof. E. SpoonernakllkNessuna valutazione finora
- 5.ohmic FullDocumento10 pagine5.ohmic FullTJPRC PublicationsNessuna valutazione finora
- IOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringDocumento10 pagineIOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Accepted Manuscript: Sensors and Actuators ADocumento22 pagineAccepted Manuscript: Sensors and Actuators AParvulescu CatalinNessuna valutazione finora
- An Analysis and Optimization of The Geometrical Inaccuracy in WEDM Rough Corner CuttingDocumento13 pagineAn Analysis and Optimization of The Geometrical Inaccuracy in WEDM Rough Corner CuttingHimanshu BisariaNessuna valutazione finora
- Review Paper 2Documento28 pagineReview Paper 2R. natarajan RamasamyNessuna valutazione finora
- A Critical Review On Optimization of WEDM Process Using Taguchi ArrayDocumento6 pagineA Critical Review On Optimization of WEDM Process Using Taguchi ArrayIJRASETPublicationsNessuna valutazione finora
- PM Linear ActuatorDocumento7 paginePM Linear ActuatorGthulasi78Nessuna valutazione finora
- Aux Bias WindingDocumento10 pagineAux Bias WindingxandreayNessuna valutazione finora
- Ga Speed and DQ Currnets Control of PMSM WithDocumento9 pagineGa Speed and DQ Currnets Control of PMSM Withhieuhuech1Nessuna valutazione finora
- Optimization of Planetary Movement Parameters For Microhole Drilling by Micro-Electrical Discharge MachiningDocumento5 pagineOptimization of Planetary Movement Parameters For Microhole Drilling by Micro-Electrical Discharge MachiningAgilAthallahNessuna valutazione finora
- Alpha Particle Effect On Multi-Nanosheet Tunneling Field-Effect Transistor at 3-nm Technology NodeDocumento11 pagineAlpha Particle Effect On Multi-Nanosheet Tunneling Field-Effect Transistor at 3-nm Technology Node전종욱Nessuna valutazione finora
- ICEM2020Documento8 pagineICEM2020marinkokNessuna valutazione finora
- Question Bank EMDDocumento23 pagineQuestion Bank EMDd_rajmtechNessuna valutazione finora
- Process Variation Effect, Metal Gate Work FunctionDocumento11 pagineProcess Variation Effect, Metal Gate Work Functionsunilkmch505682Nessuna valutazione finora
- Vibhuti 2020 J. Phys. Conf. Ser. 1478 012029Documento11 pagineVibhuti 2020 J. Phys. Conf. Ser. 1478 012029Victor Julián Fernández CarrazanaNessuna valutazione finora
- Vibhuti 2020 J. Phys. Conf. Ser. 1478 012029Documento11 pagineVibhuti 2020 J. Phys. Conf. Ser. 1478 012029Victor Julián Fernández CarrazanaNessuna valutazione finora
- Analysis and Design Optimization of An Improved AxDocumento9 pagineAnalysis and Design Optimization of An Improved AxSubrat DasNessuna valutazione finora
- An Engineering Approach in Modeling Lightning Effects On Megawatt-Class Onshore Wind Turbines Using EMTP and ModelsDocumento5 pagineAn Engineering Approach in Modeling Lightning Effects On Megawatt-Class Onshore Wind Turbines Using EMTP and ModelsYume YumeNessuna valutazione finora
- JournalDocumento6 pagineJournaldzulkiNessuna valutazione finora
- Magnetostrictive MaterialDocumento4 pagineMagnetostrictive MaterialTung VanNessuna valutazione finora
- Technology and Development of High Temperature Superconducting Linear MotorsDocumento6 pagineTechnology and Development of High Temperature Superconducting Linear Motorsg.jayakrishnaNessuna valutazione finora
- Microelectromechanical Systems Vibration Powered Electromagnetic Generator For Wireless Sensor ApplicationsDocumento7 pagineMicroelectromechanical Systems Vibration Powered Electromagnetic Generator For Wireless Sensor ApplicationskhodabandelouNessuna valutazione finora
- O. Gafri, A. Izhar, Y. Livshitz and V. Shribman - Magnetic Pulse AccelerationDocumento8 pagineO. Gafri, A. Izhar, Y. Livshitz and V. Shribman - Magnetic Pulse AccelerationCola7890Nessuna valutazione finora
- Design of A Magnetic Braking SystemDocumento3 pagineDesign of A Magnetic Braking Systemivan celyNessuna valutazione finora
- System Electrical Parameters and Their Effects On Bearing CurrentsDocumento8 pagineSystem Electrical Parameters and Their Effects On Bearing CurrentshamidrezaNessuna valutazione finora
- A Study of Electrical Discharge Grinding Using A Rotary Disk ElectrodeDocumento9 pagineA Study of Electrical Discharge Grinding Using A Rotary Disk ElectrodeSarath ChandraNessuna valutazione finora
- Assessment of The Use of FEM For Computation of FEMDocumento11 pagineAssessment of The Use of FEM For Computation of FEMjackthonetNessuna valutazione finora
- Design Methodology of A Permanent MagnetDocumento10 pagineDesign Methodology of A Permanent MagnetJian ZhangNessuna valutazione finora
- Finite Element Analysis of Wire Electrode On WEDM Process Using ANSYSDocumento14 pagineFinite Element Analysis of Wire Electrode On WEDM Process Using ANSYSIJRASETPublicationsNessuna valutazione finora
- Computation of Additional Losses Due To Rotoreccentricity in Electrical MachinesDocumento8 pagineComputation of Additional Losses Due To Rotoreccentricity in Electrical Machinesafru2000Nessuna valutazione finora
- Effects of Process Parameters On Material Removal Rate in WEDMDocumento5 pagineEffects of Process Parameters On Material Removal Rate in WEDMcrazynupNessuna valutazione finora
- Brushless DC MotorDocumento11 pagineBrushless DC MotorSek PyroNessuna valutazione finora
- J.K. Doley, S.D. Kore : Fully Coupled Numerical Simulation of Electromagnetic FormingDocumento7 pagineJ.K. Doley, S.D. Kore : Fully Coupled Numerical Simulation of Electromagnetic FormingHanbin KangNessuna valutazione finora
- MECH68Documento8 pagineMECH68GogyNessuna valutazione finora
- Study of Process Parameter of Wire Electric Discharge Machining The ReviewDocumento5 pagineStudy of Process Parameter of Wire Electric Discharge Machining The ReviewIAEME PublicationNessuna valutazione finora
- 1A DefectDocumento8 pagine1A Defectdaniel_sa2011Nessuna valutazione finora
- Optimization of Material Removal Rate in Electrical Discharge Machining Using Fuzzy LogicDocumento9 pagineOptimization of Material Removal Rate in Electrical Discharge Machining Using Fuzzy Logicjyoti_bhanot1039Nessuna valutazione finora
- Leakage Inductance Calculations in Dierent Geometries of Traction TransformersDocumento7 pagineLeakage Inductance Calculations in Dierent Geometries of Traction Transformersbtd2011Nessuna valutazione finora
- Experimental Investigation and Multi-Objective Optimization of Wire Electrical Discharge Machining (WEDM) of 5083 Aluminum AlloyDocumento7 pagineExperimental Investigation and Multi-Objective Optimization of Wire Electrical Discharge Machining (WEDM) of 5083 Aluminum AlloyÐɤ Suman ChatterjeeNessuna valutazione finora
- Spintronics for Next Generation Innovative DevicesDa EverandSpintronics for Next Generation Innovative DevicesKatsuaki SatoNessuna valutazione finora
- Journal of Manufacturing Processes: Reza Kashiry Fard, Reza Azar Afza, Reza TeimouriDocumento12 pagineJournal of Manufacturing Processes: Reza Kashiry Fard, Reza Azar Afza, Reza TeimouriÐɤ Suman ChatterjeeNessuna valutazione finora
- A: Pulse W Idth B: Lamp CurrentDocumento3 pagineA: Pulse W Idth B: Lamp CurrentÐɤ Suman ChatterjeeNessuna valutazione finora
- Temperature Field Simulation of Wire Electrode in High-Speed and Medium-Speed WEDM Under Moving Heat SourceDocumento6 pagineTemperature Field Simulation of Wire Electrode in High-Speed and Medium-Speed WEDM Under Moving Heat SourceÐɤ Suman ChatterjeeNessuna valutazione finora
- Experimental Investigation and Multi-Objective Optimization of Wire Electrical Discharge Machining (WEDM) of 5083 Aluminum AlloyDocumento7 pagineExperimental Investigation and Multi-Objective Optimization of Wire Electrical Discharge Machining (WEDM) of 5083 Aluminum AlloyÐɤ Suman ChatterjeeNessuna valutazione finora
- Miniaturization of WEDM Using Electrostatic Induction Feeding MethodDocumento7 pagineMiniaturization of WEDM Using Electrostatic Induction Feeding MethodÐɤ Suman ChatterjeeNessuna valutazione finora
- CIRP - Paper - Simulation-Based Twist Drill Design and Geometry OptimizationDocumento6 pagineCIRP - Paper - Simulation-Based Twist Drill Design and Geometry OptimizationÐɤ Suman ChatterjeeNessuna valutazione finora
- Ijest NG Vol2 No1 pp92 102Documento11 pagineIjest NG Vol2 No1 pp92 102Ðɤ Suman ChatterjeeNessuna valutazione finora
- 090606-363 1Documento7 pagine090606-363 1Ðɤ Suman ChatterjeeNessuna valutazione finora
- Wind Energy Nguyen Hoang Viet Final 18102Documento75 pagineWind Energy Nguyen Hoang Viet Final 18102Ðɤ Suman ChatterjeeNessuna valutazione finora
- Accuracy of Suboptimal Solutions To Kernel Principal Component AnalysisDocumento23 pagineAccuracy of Suboptimal Solutions To Kernel Principal Component AnalysisÐɤ Suman ChatterjeeNessuna valutazione finora
- Aimtdr2014 Fullpaper TemplateDocumento2 pagineAimtdr2014 Fullpaper Templatearbind.Nessuna valutazione finora
- 2012 PEEK HDBK RoederDocumento17 pagine2012 PEEK HDBK RoederÐɤ Suman ChatterjeeNessuna valutazione finora
- Kelken US Metric Chart ASTM A276 SS 304 PDFDocumento1 paginaKelken US Metric Chart ASTM A276 SS 304 PDFÐɤ Suman ChatterjeeNessuna valutazione finora
- Analysis of Pulsed Nd:YAG Laser Welding of AISI 304 Steel: Kwanwoo Kim, Jungkil Lee and Haeyong ChoDocumento7 pagineAnalysis of Pulsed Nd:YAG Laser Welding of AISI 304 Steel: Kwanwoo Kim, Jungkil Lee and Haeyong ChoÐɤ Suman ChatterjeeNessuna valutazione finora
- ReferenceDocumento7 pagineReferenceÐɤ Suman ChatterjeeNessuna valutazione finora
- (C) Lower Upper: A A A A A A A A A A A A A A A A C A ADocumento31 pagine(C) Lower Upper: A A A A A A A A A A A A A A A A C A AÐɤ Suman ChatterjeeNessuna valutazione finora
- 1482 FulldDocumento6 pagine1482 FulldÐɤ Suman ChatterjeeNessuna valutazione finora
- Certificate of The GuideDocumento2 pagineCertificate of The GuideÐɤ Suman ChatterjeeNessuna valutazione finora
- WWW - Ignou.ac - in Upload UNIT6-55 PDFDocumento60 pagineWWW - Ignou.ac - in Upload UNIT6-55 PDFSatish Singh ChauhanNessuna valutazione finora
- Pset 2Documento13 paginePset 2rishiko aquinoNessuna valutazione finora
- Breaking News EnglishDocumento13 pagineBreaking News English32. Nguyễn OanhNessuna valutazione finora
- 1609 Um009 - en PDocumento34 pagine1609 Um009 - en PAnonymous VKBlWeyNessuna valutazione finora
- Xafsa 1Documento19 pagineXafsa 1Heitham OmarNessuna valutazione finora
- Agriculture: PAPER 3 Practical TestDocumento8 pagineAgriculture: PAPER 3 Practical Testmstudy123456Nessuna valutazione finora
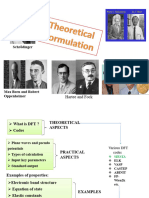
- DFT UploadDocumento13 pagineDFT Uploadmeghraj01Nessuna valutazione finora
- Concept MapDocumento1 paginaConcept Mapapi-402935758Nessuna valutazione finora
- Chemistry Module 3Documento14 pagineChemistry Module 3MASHNessuna valutazione finora
- What Is E-CollaborationDocumento7 pagineWhat Is E-CollaborationToumba LimbreNessuna valutazione finora
- Sap Business Objects Edge Series 3.1 Install Windows enDocumento104 pagineSap Business Objects Edge Series 3.1 Install Windows enGerardoNessuna valutazione finora
- PTPL Ir 2018Documento383 paginePTPL Ir 2018Guan WenhaiNessuna valutazione finora
- Cultivation and Horticulture of SandalwoodDocumento2 pagineCultivation and Horticulture of SandalwoodAnkitha goriNessuna valutazione finora
- PGT Computer Science Kendriya Vidyalaya Entrance Exam Question PapersDocumento117 paginePGT Computer Science Kendriya Vidyalaya Entrance Exam Question PapersimshwezNessuna valutazione finora
- B2 UNIT 6 Test StandardDocumento6 pagineB2 UNIT 6 Test StandardКоваленко КатяNessuna valutazione finora
- 1.4 BG00381946 - ADocumento1 pagina1.4 BG00381946 - AAnand KesarkarNessuna valutazione finora
- Xiaopan OS: DescriptionDocumento1 paginaXiaopan OS: DescriptionMan SavliNessuna valutazione finora
- ScriptDocumento12 pagineScriptWaleed Nadeem50% (2)
- UntitledDocumento45 pagineUntitledjemNessuna valutazione finora
- Graphs in ChemDocumento10 pagineGraphs in Chemzhaney0625Nessuna valutazione finora
- NewspaperDocumento2 pagineNewspaperbro nabsNessuna valutazione finora
- Prototyping: by DR Sampa Unnikrishnan Yateer Creative Solutions Reachus@Yateer - In, 8971442777Documento70 paginePrototyping: by DR Sampa Unnikrishnan Yateer Creative Solutions Reachus@Yateer - In, 8971442777ShivashankarNessuna valutazione finora
- Lecture 7Documento68 pagineLecture 7Gay TonyNessuna valutazione finora
- Cel2106 SCL Worksheet 6Documento3 pagineCel2106 SCL Worksheet 6HarryJoy JackNessuna valutazione finora
- The "Kind Martin" Strategy - Official Olymp Trade BlogDocumento7 pagineThe "Kind Martin" Strategy - Official Olymp Trade BlogGopal NapoleonNessuna valutazione finora