Potrebbero piacerti anche
- Differential Forms on Electromagnetic NetworksDa EverandDifferential Forms on Electromagnetic NetworksValutazione: 4 su 5 stelle4/5 (1)
- Author's Accepted ManuscriptDocumento20 pagineAuthor's Accepted ManuscriptÐɤ Suman Chatterjee100% (1)
- Review Paper 2Documento28 pagineReview Paper 2R. natarajan RamasamyNessuna valutazione finora
- Relevant Characteristics of Power Lines Passing through Urban AreasDa EverandRelevant Characteristics of Power Lines Passing through Urban AreasNessuna valutazione finora
- Comb Drive PDFDocumento9 pagineComb Drive PDFS PERSIS ALEXNessuna valutazione finora
- Electromagnetic Compatibility in Underground Mining: Selected ProblemsDa EverandElectromagnetic Compatibility in Underground Mining: Selected ProblemsNessuna valutazione finora
- 22 - M. Abdel-SalamDocumento14 pagine22 - M. Abdel-SalamiisteNessuna valutazione finora
- Confers PDFDocumento7 pagineConfers PDFshanjuneo17Nessuna valutazione finora
- Investigation On Material Removal Rate of Al + 6% B C MMC in Wire Electrical Discharge Machining ProcessDocumento7 pagineInvestigation On Material Removal Rate of Al + 6% B C MMC in Wire Electrical Discharge Machining Processshanjuneo17Nessuna valutazione finora
- Regular Paper Impact of Mechanical Forces in A 25ka Current Injection TransformerDocumento14 pagineRegular Paper Impact of Mechanical Forces in A 25ka Current Injection TransformerConstantin DorinelNessuna valutazione finora
- Characterizing The Effects of Micro Electrical DisDocumento6 pagineCharacterizing The Effects of Micro Electrical DisNguyễn Hữu PhấnNessuna valutazione finora
- Articol 9Documento6 pagineArticol 9Constantin DorinelNessuna valutazione finora
- An Analysis and Optimization of The Geometrical Inaccuracy in WEDM Rough Corner CuttingDocumento13 pagineAn Analysis and Optimization of The Geometrical Inaccuracy in WEDM Rough Corner CuttingHimanshu BisariaNessuna valutazione finora
- Analysis of FormulasDocumento21 pagineAnalysis of Formulasjesus marquez arvaezNessuna valutazione finora
- Electromagnetic Interference Caused by Iraqi 400kV Transmission Lines On Buried Oil PipelinesDocumento17 pagineElectromagnetic Interference Caused by Iraqi 400kV Transmission Lines On Buried Oil PipelinesisukuruNessuna valutazione finora
- Dr. M.A. Mueller, Dr. J.R. Bumby and Prof. E. SpoonerDocumento6 pagineDr. M.A. Mueller, Dr. J.R. Bumby and Prof. E. SpoonernakllkNessuna valutazione finora
- Design and Modelling of ECM Rifling ToolDocumento5 pagineDesign and Modelling of ECM Rifling Tooldavid2404100% (2)
- Process Variation Effect, Metal Gate Work FunctionDocumento11 pagineProcess Variation Effect, Metal Gate Work Functionsunilkmch505682Nessuna valutazione finora
- IOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringDocumento10 pagineIOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Alpha Particle Effect On Multi-Nanosheet Tunneling Field-Effect Transistor at 3-nm Technology NodeDocumento11 pagineAlpha Particle Effect On Multi-Nanosheet Tunneling Field-Effect Transistor at 3-nm Technology Node전종욱Nessuna valutazione finora
- Experimental Investigation and Multi-Objective Optimization of Wire Electrical Discharge Machining (WEDM) of 5083 Aluminum AlloyDocumento7 pagineExperimental Investigation and Multi-Objective Optimization of Wire Electrical Discharge Machining (WEDM) of 5083 Aluminum AlloyÐɤ Suman ChatterjeeNessuna valutazione finora
- A Study of Electrical Discharge Grinding Using A Rotary Disk ElectrodeDocumento9 pagineA Study of Electrical Discharge Grinding Using A Rotary Disk ElectrodeSarath ChandraNessuna valutazione finora
- JournalDocumento6 pagineJournaldzulkiNessuna valutazione finora
- A Brief Review of Die Sinking Electrical Discharging Machining Process Towards AutomationDocumento7 pagineA Brief Review of Die Sinking Electrical Discharging Machining Process Towards AutomationMayank Rajesh Kumar ShrivastavaNessuna valutazione finora
- CNC Wire-Cut Parameter Optimized Determination of The Stair Shape WorkpieceDocumento6 pagineCNC Wire-Cut Parameter Optimized Determination of The Stair Shape Workpiecegargsumit107Nessuna valutazione finora
- 5.ohmic FullDocumento10 pagine5.ohmic FullTJPRC PublicationsNessuna valutazione finora
- Power Transformer Winding Model For Lightning Impulse Testing PDFDocumento8 paginePower Transformer Winding Model For Lightning Impulse Testing PDFalex696Nessuna valutazione finora
- Vibhuti 2020 J. Phys. Conf. Ser. 1478 012029Documento11 pagineVibhuti 2020 J. Phys. Conf. Ser. 1478 012029Victor Julián Fernández CarrazanaNessuna valutazione finora
- Vibhuti 2020 J. Phys. Conf. Ser. 1478 012029Documento11 pagineVibhuti 2020 J. Phys. Conf. Ser. 1478 012029Victor Julián Fernández CarrazanaNessuna valutazione finora
- Multiphysics Analysis of Busbars With Various Arrangements Under Short-Circuit Condition - IET JournalsDocumento9 pagineMultiphysics Analysis of Busbars With Various Arrangements Under Short-Circuit Condition - IET JournalsfinolhNessuna valutazione finora
- Review of Electrochemical and Electrodischarge MachiningDocumento14 pagineReview of Electrochemical and Electrodischarge Machiningdinesh veerNessuna valutazione finora
- A Study of Influence of Electrochemical Process Parameters On The Material Removal Rate and Surface Roughness of SS AISI 304Documento9 pagineA Study of Influence of Electrochemical Process Parameters On The Material Removal Rate and Surface Roughness of SS AISI 304Manu RavuriNessuna valutazione finora
- Power Cable High Freq ModelDocumento7 paginePower Cable High Freq ModelkrcdewanewNessuna valutazione finora
- 10.1115imece2010 39548 1Documento10 pagine10.1115imece2010 39548 1muhammad asmaeelNessuna valutazione finora
- Optimal Design of A High-Speed PMSGDocumento13 pagineOptimal Design of A High-Speed PMSGHuynh Thanh AnhNessuna valutazione finora
- A Critical Review On Optimization of WEDM Process Using Taguchi ArrayDocumento6 pagineA Critical Review On Optimization of WEDM Process Using Taguchi ArrayIJRASETPublicationsNessuna valutazione finora
- Energies 13 04846 v2Documento23 pagineEnergies 13 04846 v2Vu Kim YenNessuna valutazione finora
- Literature ReviewDocumento11 pagineLiterature Reviewgurunathan14Nessuna valutazione finora
- Magnetostrictive MaterialDocumento4 pagineMagnetostrictive MaterialTung VanNessuna valutazione finora
- Prediction of Weld Width of Shielded Metal Arc Weld Under Magnetic Field Using Artificial Neural NetworksDocumento7 paginePrediction of Weld Width of Shielded Metal Arc Weld Under Magnetic Field Using Artificial Neural NetworksInternational Journal of computational Engineering research (IJCER)Nessuna valutazione finora
- Aux Bias WindingDocumento10 pagineAux Bias WindingxandreayNessuna valutazione finora
- Wedm MachiningDocumento8 pagineWedm MachininglarryNessuna valutazione finora
- Modeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyDocumento14 pagineModeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyIAEME PublicationNessuna valutazione finora
- Stray Loss Evaluation in Power TransformersDocumento6 pagineStray Loss Evaluation in Power Transformersbtd2011Nessuna valutazione finora
- Assessment of The Use of FEM For Computation of FEMDocumento11 pagineAssessment of The Use of FEM For Computation of FEMjackthonetNessuna valutazione finora
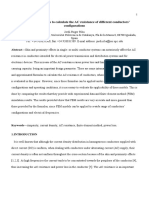
- Analysis of Formulas To Calculate The AC Resistance of Different Conductors'Documento21 pagineAnalysis of Formulas To Calculate The AC Resistance of Different Conductors'Vlad AlexNessuna valutazione finora
- Selected Problems of Micro-Electrochemical Machining: Jerzy Kozak, Kamlakar P. Rajurkar, Yogesh MakkarDocumento6 pagineSelected Problems of Micro-Electrochemical Machining: Jerzy Kozak, Kamlakar P. Rajurkar, Yogesh MakkarHusnainNessuna valutazione finora
- International Journal of Non-Linear Mechanics: Hamid M. Sedighi, A. Koochi, Farhang Daneshmand, M. AbadyanDocumento11 pagineInternational Journal of Non-Linear Mechanics: Hamid M. Sedighi, A. Koochi, Farhang Daneshmand, M. AbadyanHidan WLNessuna valutazione finora
- Materials 15 00513 v2Documento14 pagineMaterials 15 00513 v2Abraham GutierrezNessuna valutazione finora
- 001 Ieee-Tas 12-10-2019Documento11 pagine001 Ieee-Tas 12-10-2019AMIR KHANNessuna valutazione finora
- Investigation On Electro Discharge Machining of H13Documento10 pagineInvestigation On Electro Discharge Machining of H13Nguyễn Hữu PhấnNessuna valutazione finora
- Psyk 2017Documento7 paginePsyk 2017popescu roxanaNessuna valutazione finora
- Research of The Loss of Power Transformer StructurDocumento8 pagineResearch of The Loss of Power Transformer StructurbenlahnecheNessuna valutazione finora
- 2013 Improving Machining Accuracy of Electrochemical Machining Blade by Optimization of Cathode Feeding DirectionsDocumento8 pagine2013 Improving Machining Accuracy of Electrochemical Machining Blade by Optimization of Cathode Feeding Directionsomkar dadiNessuna valutazione finora
- Electrochemical MACHININGDocumento14 pagineElectrochemical MACHININGpramod_k100% (2)
- Armature Reaction Field and Inductance of Coreless Moving-Coil Tubular Linear MachineDocumento10 pagineArmature Reaction Field and Inductance of Coreless Moving-Coil Tubular Linear MachineemnilyNessuna valutazione finora
- Eddy CurrentsDocumento11 pagineEddy CurrentsIban Barrutia Inza0% (1)
- Lázaro Plata 2020 J. Phys. Conf. Ser. 1587 012034Documento8 pagineLázaro Plata 2020 J. Phys. Conf. Ser. 1587 012034fernandoNessuna valutazione finora
- Electrode CoatingDocumento8 pagineElectrode CoatingSaurabh JainNessuna valutazione finora
- A: Pulse W Idth B: Lamp CurrentDocumento3 pagineA: Pulse W Idth B: Lamp CurrentÐɤ Suman ChatterjeeNessuna valutazione finora
- Temperature Field Simulation of Wire Electrode in High-Speed and Medium-Speed WEDM Under Moving Heat SourceDocumento6 pagineTemperature Field Simulation of Wire Electrode in High-Speed and Medium-Speed WEDM Under Moving Heat SourceÐɤ Suman ChatterjeeNessuna valutazione finora
- Journal of Manufacturing Processes: Reza Kashiry Fard, Reza Azar Afza, Reza TeimouriDocumento12 pagineJournal of Manufacturing Processes: Reza Kashiry Fard, Reza Azar Afza, Reza TeimouriÐɤ Suman ChatterjeeNessuna valutazione finora
- Experimental Investigation and Multi-Objective Optimization of Wire Electrical Discharge Machining (WEDM) of 5083 Aluminum AlloyDocumento7 pagineExperimental Investigation and Multi-Objective Optimization of Wire Electrical Discharge Machining (WEDM) of 5083 Aluminum AlloyÐɤ Suman ChatterjeeNessuna valutazione finora
- Analysis of Pulsed Nd:YAG Laser Welding of AISI 304 Steel: Kwanwoo Kim, Jungkil Lee and Haeyong ChoDocumento7 pagineAnalysis of Pulsed Nd:YAG Laser Welding of AISI 304 Steel: Kwanwoo Kim, Jungkil Lee and Haeyong ChoÐɤ Suman ChatterjeeNessuna valutazione finora
- Kelken US Metric Chart ASTM A276 SS 304 PDFDocumento1 paginaKelken US Metric Chart ASTM A276 SS 304 PDFÐɤ Suman ChatterjeeNessuna valutazione finora
- (C) Lower Upper: A A A A A A A A A A A A A A A A C A ADocumento31 pagine(C) Lower Upper: A A A A A A A A A A A A A A A A C A AÐɤ Suman ChatterjeeNessuna valutazione finora
- ReferenceDocumento7 pagineReferenceÐɤ Suman ChatterjeeNessuna valutazione finora
- Certificate of The GuideDocumento2 pagineCertificate of The GuideÐɤ Suman ChatterjeeNessuna valutazione finora
- Republic of The Philippines Batangas State UniversityDocumento10 pagineRepublic of The Philippines Batangas State UniversityHANNAH MARIE VINOYANessuna valutazione finora
- Determination of The Weight Percent Individual Volatile Organic Compounds in Waterborne Air-Dry Coatings by Gas ChromatographyDocumento9 pagineDetermination of The Weight Percent Individual Volatile Organic Compounds in Waterborne Air-Dry Coatings by Gas Chromatographyasma hamzaNessuna valutazione finora
- Astm 239 PreceeDocumento4 pagineAstm 239 PreceeJesus Antonio Zuniga Martinez100% (1)
- Instructions For Application of Ced Primers TE-8800: Cationic Epoxy ElectrocoatingDocumento11 pagineInstructions For Application of Ced Primers TE-8800: Cationic Epoxy ElectrocoatingSushil KumarNessuna valutazione finora
- Soalan ObjektifDocumento9 pagineSoalan ObjektifHairul Nizam OmarNessuna valutazione finora
- Electrochemical Exfoliation of Graphite: Effect of Temperature and Hydrogen Peroxide AdditionDocumento8 pagineElectrochemical Exfoliation of Graphite: Effect of Temperature and Hydrogen Peroxide AdditionTofazzel HossainNessuna valutazione finora
- To Estimate Charge On Pith Ball Class XIIDocumento17 pagineTo Estimate Charge On Pith Ball Class XIIHollow GamingNessuna valutazione finora
- CHEM 331 Kraus Ihazlett 1 Chapter10Documento10 pagineCHEM 331 Kraus Ihazlett 1 Chapter10Ahmed Sideeg100% (1)
- Physics 430: Lecture 6 Center of Mass, Angular Momentum: Dale E. GaryDocumento17 paginePhysics 430: Lecture 6 Center of Mass, Angular Momentum: Dale E. GaryRoger MelkoNessuna valutazione finora
- 10 Science Chemical Reactions and Equations Test 03 PDFDocumento2 pagine10 Science Chemical Reactions and Equations Test 03 PDFNiranjan BeheraNessuna valutazione finora
- Fabrication and Tribological Behavior of Al2O3 (MoS2-BaSO4) LaminatedDocumento8 pagineFabrication and Tribological Behavior of Al2O3 (MoS2-BaSO4) LaminatedMouna KallelNessuna valutazione finora
- Postharvest Biology and Technology: A A A B C A D DDocumento10 paginePostharvest Biology and Technology: A A A B C A D DRestrepo JuanNessuna valutazione finora
- Carbonic Anhydrase Immobilized On Encapsulated Magnetic Nanoparticles For CO2 SequestrationDocumento8 pagineCarbonic Anhydrase Immobilized On Encapsulated Magnetic Nanoparticles For CO2 SequestrationASinopoliNessuna valutazione finora
- Leader Online Test Series For Jee Main 2020Documento2 pagineLeader Online Test Series For Jee Main 2020Aman KumarNessuna valutazione finora
- Rheology and Hydraulics: Rheology Is The Science of Deformation and Flow of MatterDocumento36 pagineRheology and Hydraulics: Rheology Is The Science of Deformation and Flow of Matterhassan haddadiNessuna valutazione finora
- 2151902Documento49 pagine2151902swarajNessuna valutazione finora
- Kinetics of Particles ProblemsDocumento17 pagineKinetics of Particles ProblemsCha Castillo100% (1)
- Appendix 7 - 4: Weather of Dalbandin, Baluchistan PakistanDocumento4 pagineAppendix 7 - 4: Weather of Dalbandin, Baluchistan PakistanZia JanNessuna valutazione finora
- Nazis Tried To Turn Sand in To GoldDocumento9 pagineNazis Tried To Turn Sand in To GoldJorge Daniel Ferreira GranadosNessuna valutazione finora
- Question Bank For May 2017 PhysicsDocumento5 pagineQuestion Bank For May 2017 PhysicsKushagra MittalNessuna valutazione finora
- Ammonia SlidesDocumento6 pagineAmmonia SlidesElton TimmNessuna valutazione finora
- CHM 152Ll: Thermodynamics: Pre LabDocumento5 pagineCHM 152Ll: Thermodynamics: Pre LabIpshita PathakNessuna valutazione finora
- Chemistry Booklet No 4 EngineeringDocumento382 pagineChemistry Booklet No 4 EngineeringVarad BhosaleNessuna valutazione finora
- Chapter 1: Physical World: 10+1 Physics Study Material-Chapter 1 WWW - Rsnotes.InDocumento4 pagineChapter 1: Physical World: 10+1 Physics Study Material-Chapter 1 WWW - Rsnotes.InAnkit SahaNessuna valutazione finora
- Food Chemistry: Shuo Wang, Xiaojun Cui, Guozhen FangDocumento7 pagineFood Chemistry: Shuo Wang, Xiaojun Cui, Guozhen FangLINDANessuna valutazione finora
- Air Entraining CementDocumento14 pagineAir Entraining CementBashairu WaseemNessuna valutazione finora
- Compounds and Alloyds of MagnesiumDocumento30 pagineCompounds and Alloyds of MagnesiumJudy PocquiasNessuna valutazione finora
- Docking IntroductionDocumento17 pagineDocking IntroductionPrasath KumarNessuna valutazione finora
- Temperature and Heat: Powerpoint Lectures ForDocumento32 pagineTemperature and Heat: Powerpoint Lectures ForAbdullah ZafarNessuna valutazione finora
- Spectral Reflectance of VegetationDocumento20 pagineSpectral Reflectance of VegetationMithra 1994Nessuna valutazione finora
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisDa EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisValutazione: 4 su 5 stelle4/5 (2)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionDa EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionValutazione: 4.5 su 5 stelle4.5/5 (3)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDa EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsValutazione: 3.5 su 5 stelle3.5/5 (3)
- Chasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItDa EverandChasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItValutazione: 4 su 5 stelle4/5 (25)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseDa EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseValutazione: 4.5 su 5 stelle4.5/5 (51)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedDa EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedValutazione: 5 su 5 stelle5/5 (1)
- Fuels, Furnaces and Refractories: International Series on Materials Science and TechnologyDa EverandFuels, Furnaces and Refractories: International Series on Materials Science and TechnologyValutazione: 5 su 5 stelle5/5 (1)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CDa EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNessuna valutazione finora
- The Laws of Thermodynamics: A Very Short IntroductionDa EverandThe Laws of Thermodynamics: A Very Short IntroductionValutazione: 4.5 su 5 stelle4.5/5 (10)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ADa EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ANessuna valutazione finora
- Electrical (Generator and Electrical Plant): Modern Power Station PracticeDa EverandElectrical (Generator and Electrical Plant): Modern Power Station PracticeValutazione: 4 su 5 stelle4/5 (9)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)Da EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Valutazione: 4 su 5 stelle4/5 (12)
- Gas Turbines: A Handbook of Air, Land and Sea ApplicationsDa EverandGas Turbines: A Handbook of Air, Land and Sea ApplicationsValutazione: 4 su 5 stelle4/5 (9)
- Mechanical Vibrations and Condition MonitoringDa EverandMechanical Vibrations and Condition MonitoringValutazione: 5 su 5 stelle5/5 (1)
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsDa EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNessuna valutazione finora
- Piping Design for Industrial Facilities: Understanding Codes and StandardsDa EverandPiping Design for Industrial Facilities: Understanding Codes and StandardsValutazione: 4 su 5 stelle4/5 (1)
- Bulk Material Handling: Practical Guidance for Mechanical EngineersDa EverandBulk Material Handling: Practical Guidance for Mechanical EngineersValutazione: 5 su 5 stelle5/5 (1)
- Handbook of Mechanical and Materials EngineeringDa EverandHandbook of Mechanical and Materials EngineeringValutazione: 5 su 5 stelle5/5 (4)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsDa EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNessuna valutazione finora