Potrebbero piacerti anche
- Patran 2012 User's Guide PDFDocumento230 paginePatran 2012 User's Guide PDFDavid Merayo Fernández0% (1)
- How To Design ProgramsDocumento636 pagineHow To Design ProgramsManuel Sosaeta100% (3)
- IRS ProductsDocumento12 pagineIRS ProductsGianluca BacchiegaNessuna valutazione finora
- ME Computer Engineering Syllabus - 5!8!13Documento37 pagineME Computer Engineering Syllabus - 5!8!13virusisb4uNessuna valutazione finora
- M.Tech Embedded System Technologies Part Time Curriculum & Syllabus Semester IDocumento38 pagineM.Tech Embedded System Technologies Part Time Curriculum & Syllabus Semester Iarunbalaji86Nessuna valutazione finora
- Manipal Institute of Technology: Course PlanDocumento3 pagineManipal Institute of Technology: Course PlanHacraloNessuna valutazione finora
- Scheme and Syllabi For Seventh Semester CSEDocumento13 pagineScheme and Syllabi For Seventh Semester CSEAnoop K VenuNessuna valutazione finora
- Sample ResumeDocumento5 pagineSample ResumeShalini VermaNessuna valutazione finora
- Syllabus PGDocumento17 pagineSyllabus PGAvinash SinghNessuna valutazione finora
- Design of Plural-Multiplier Based On CORDIC Algorithm For FFT ApplicationDocumento3 pagineDesign of Plural-Multiplier Based On CORDIC Algorithm For FFT ApplicationNsrc Nano ScientifcNessuna valutazione finora
- EC302 Digital Integrated Circuits and Applications: With Effect From The Academic Year 2012-13Documento6 pagineEC302 Digital Integrated Circuits and Applications: With Effect From The Academic Year 2012-13J RaviNessuna valutazione finora
- Cns Lab ManualDocumento48 pagineCns Lab Manualjagadeesh1246100% (1)
- So156 Review For Journal Print of Some Friend, ElectronicsDocumento5 pagineSo156 Review For Journal Print of Some Friend, ElectronicsAbhishek GuptaNessuna valutazione finora
- Towards Credibible Simulation ResultsDocumento21 pagineTowards Credibible Simulation ResultsEdjair MotaNessuna valutazione finora
- AutoCAD PROJECT REPORT Daksh Cad TechnologyDocumento58 pagineAutoCAD PROJECT REPORT Daksh Cad TechnologyPawan Saini100% (1)
- Cad - CamDocumento27 pagineCad - CamBhuvanesh KumarNessuna valutazione finora
- Resume Mic 2Documento3 pagineResume Mic 2Ganga DharNessuna valutazione finora
- 273 Partial Final Ans 2010 FallDocumento5 pagine273 Partial Final Ans 2010 FallJi Wook HwangNessuna valutazione finora
- A Project Report On "College Pay Roll Management System": Department of Computer Science G.C.W Parade, Jammu (2012-2013)Documento116 pagineA Project Report On "College Pay Roll Management System": Department of Computer Science G.C.W Parade, Jammu (2012-2013)Puneet ChawlaNessuna valutazione finora
- CV Meghavi PatelDocumento2 pagineCV Meghavi PatelBrijesh_modi_28Nessuna valutazione finora
- Lesson Plan OoadDocumento3 pagineLesson Plan OoadvplvplNessuna valutazione finora
- Computer OrganizationDocumento4 pagineComputer OrganizationKumar Saurabh SrivastavaNessuna valutazione finora
- Total Credits For Diploma (25 + 23) 48Documento16 pagineTotal Credits For Diploma (25 + 23) 48arundhathinairNessuna valutazione finora
- Chettinad College of Engineering and TechnologyDocumento6 pagineChettinad College of Engineering and TechnologymsksaranNessuna valutazione finora
- Gujarat Technological University: A Project Report OnDocumento5 pagineGujarat Technological University: A Project Report OnSushant SharmaNessuna valutazione finora
- CS1203 System Software UNIT I Question AnsDocumento10 pagineCS1203 System Software UNIT I Question AnsChippyVijayanNessuna valutazione finora
- Electronics and Communication Engineering: PAPR Analysis of DHT-Precoded OFDM System For M-QAMDocumento19 pagineElectronics and Communication Engineering: PAPR Analysis of DHT-Precoded OFDM System For M-QAMPrathyushaGyabiNessuna valutazione finora
- Indian Institute of Technology Roorkee Questionnaire: About The CompanyDocumento5 pagineIndian Institute of Technology Roorkee Questionnaire: About The CompanySandeep KadamNessuna valutazione finora
- Java Lab ProgramsDocumento64 pagineJava Lab ProgramsprasanasridharNessuna valutazione finora
- Submmmited By: Examination Monitoring SystemDocumento79 pagineSubmmmited By: Examination Monitoring Systemrajeevv_6Nessuna valutazione finora
- Neural AssignmentDocumento76 pagineNeural AssignmentMustaQeem AhmadNessuna valutazione finora
- Data Mining Lesson Plan-Revised SyllabusDocumento4 pagineData Mining Lesson Plan-Revised Syllabusrahulrnair4u_5534754Nessuna valutazione finora
- Patran 2010 User S GuideDocumento229 paginePatran 2010 User S GuideAshish KumarNessuna valutazione finora
- 2012 IN4392 Lecture-5 CloudProgrammingModelsDocumento95 pagine2012 IN4392 Lecture-5 CloudProgrammingModelsakbisoi1Nessuna valutazione finora
- 900 Umts 3GDocumento4 pagine900 Umts 3GSuneth MendisNessuna valutazione finora
- MTech - RF SyllabusDocumento31 pagineMTech - RF SyllabusAbhijat KhokharNessuna valutazione finora
- Ramani Mayappan Ramani@perlis - Uitm.edu - MyDocumento2 pagineRamani Mayappan Ramani@perlis - Uitm.edu - MyHasrolnizam HassanNessuna valutazione finora
- Scheme and Syllabi For Sixth Semester CSEDocumento15 pagineScheme and Syllabi For Sixth Semester CSEAnoop K VenuNessuna valutazione finora
- VPPFT Analysis ReportDocumento4 pagineVPPFT Analysis Reportfotisp87Nessuna valutazione finora
- ! "#$%&'& & +,$' (-'./0'#) 1' (+,%2%3#,% ! 4%) #5'./0'#) 1'./0',6 (57 ! 89+:%&%,'./0' 2 ! ?7@5%1'./0 ! A, (&6#$,%&'./0 !.db4d"eDocumento24 pagine! "#$%&'& & +,$' (-'./0'#) 1' (+,%2%3#,% ! 4%) #5'./0'#) 1'./0',6 (57 ! 89+:%&%,'./0' 2 ! ?7@5%1'./0 ! A, (&6#$,%&'./0 !.db4d"ealiNessuna valutazione finora
- Er. Shashank Tripathi-Design & EstimationDocumento4 pagineEr. Shashank Tripathi-Design & EstimationSIVANessuna valutazione finora
- Optimal Analytical Study of Microelectronic Mechanical Systems Using Multiscale Optimization Library in MatlabDocumento9 pagineOptimal Analytical Study of Microelectronic Mechanical Systems Using Multiscale Optimization Library in Matlabkhizer2aNessuna valutazione finora
- Veltech PG Vlsi RegCDocumento43 pagineVeltech PG Vlsi RegCtiitumaNessuna valutazione finora
- Engineer Computing: From September 2009Documento5 pagineEngineer Computing: From September 2009api-242714199Nessuna valutazione finora
- MS Syllabus 2009Documento47 pagineMS Syllabus 2009Anubhav KhareNessuna valutazione finora
- Knowledge Extraction From Aerodynamic Simulation Data of Compressor RotorDocumento5 pagineKnowledge Extraction From Aerodynamic Simulation Data of Compressor RotormotherearthcallsNessuna valutazione finora
- Chemical Engineering 6665: TECHNIQUES FOR CHEMICAL ENGINEERING Analysis and DesignDocumento5 pagineChemical Engineering 6665: TECHNIQUES FOR CHEMICAL ENGINEERING Analysis and DesignGapuk MaboekNessuna valutazione finora
- Design Patterns LabDocumento29 pagineDesign Patterns Labssambangi555Nessuna valutazione finora
- 15AE308J - Design Lab Manual New 2020Documento43 pagine15AE308J - Design Lab Manual New 2020rushan ahmedNessuna valutazione finora
- ABAP Code Sample To Upload Data Using BDC Recording343411326276298Documento9 pagineABAP Code Sample To Upload Data Using BDC Recording343411326276298Kishore ReddyNessuna valutazione finora
- Compiler Design ProgrsDocumento23 pagineCompiler Design ProgrsHarika ImaymissuNessuna valutazione finora
- Deepak PAL: Project FellowDocumento4 pagineDeepak PAL: Project FellowPrateek BhutaniNessuna valutazione finora
- Total: 33 Credits Thesis and Projects Options (Must Choose Any One Option)Documento2 pagineTotal: 33 Credits Thesis and Projects Options (Must Choose Any One Option)Sharif SarwarNessuna valutazione finora
- Chapter 7 ImplementationDocumento59 pagineChapter 7 ImplementationJebaraj JeevaNessuna valutazione finora
- Sponsored One Day Workshop On: Trends and Application of Heuristic Algorithm in Design and ManufacturingDocumento2 pagineSponsored One Day Workshop On: Trends and Application of Heuristic Algorithm in Design and ManufacturinggkgjNessuna valutazione finora
- 77babseesion Plan MetrologyDocumento4 pagine77babseesion Plan Metrologyroses4happinessNessuna valutazione finora
- CD Ex9Documento5 pagineCD Ex9thirushharidossNessuna valutazione finora
- Practical Numerical C Programming: Finance, Engineering, and Physics ApplicationsDa EverandPractical Numerical C Programming: Finance, Engineering, and Physics ApplicationsNessuna valutazione finora
- Using Artificial Neural Networks for Analog Integrated Circuit Design AutomationDa EverandUsing Artificial Neural Networks for Analog Integrated Circuit Design AutomationNessuna valutazione finora
- Topology Optimization and AI-based Design of Power Electronic and Electrical Devices: Principles and MethodsDa EverandTopology Optimization and AI-based Design of Power Electronic and Electrical Devices: Principles and MethodsNessuna valutazione finora
- Development of Automatic Chicken Feeder Using Arduino UnoDocumento5 pagineDevelopment of Automatic Chicken Feeder Using Arduino UnoBrayan MazónNessuna valutazione finora
- RV-RVR: Assembly and Main Instructions For Use and MaintenanceDocumento52 pagineRV-RVR: Assembly and Main Instructions For Use and MaintenanceJose Maria Franquet SalvoNessuna valutazione finora
- LT 4985 Threadlocking Users GuideDocumento12 pagineLT 4985 Threadlocking Users GuideAnonymous WDTFw8EKNessuna valutazione finora
- Textile Research Journal: Problems and Possibilities in Sliver MonitoringDocumento14 pagineTextile Research Journal: Problems and Possibilities in Sliver MonitoringMritunjay KumarNessuna valutazione finora
- General Requirements For Machine FoundationsDocumento3 pagineGeneral Requirements For Machine Foundationstaz_taz3Nessuna valutazione finora
- Siempelkamp Metalforming Presses-EngDocumento9 pagineSiempelkamp Metalforming Presses-EngAbdulsalamNessuna valutazione finora
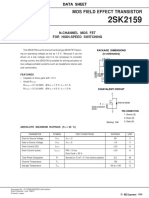
- 2SK2159Documento6 pagine2SK2159hectorsevillaNessuna valutazione finora
- Sample Power Plant Engineer CVDocumento3 pagineSample Power Plant Engineer CVs.p mohantyNessuna valutazione finora
- MP ControllersDocumento84 pagineMP ControllersmssurajNessuna valutazione finora
- ABB Safety HandbookDocumento411 pagineABB Safety HandbookandrademaxNessuna valutazione finora
- PM21 2011 Complete E1Documento996 paginePM21 2011 Complete E1Cesar_SERVIXNessuna valutazione finora
- DBE 04769dengDocumento341 pagineDBE 04769dengThaigroup CementNessuna valutazione finora
- Back To Basics - Rubbing or Not?: Annular Rub. A Partial Rub Is The Most Common Manifestation of A RubDocumento4 pagineBack To Basics - Rubbing or Not?: Annular Rub. A Partial Rub Is The Most Common Manifestation of A RubYoussef GhanemNessuna valutazione finora
- 320CDocumento77 pagine320COveis YNessuna valutazione finora
- Group 7 Robotic ArmDocumento39 pagineGroup 7 Robotic Armpramo_dassNessuna valutazione finora
- SM482 PLUS Maintenance (Eng Ver2.3)Documento72 pagineSM482 PLUS Maintenance (Eng Ver2.3)Jonathan ValdezNessuna valutazione finora
- Aeronautics PDFDocumento326 pagineAeronautics PDFNarainNessuna valutazione finora
- PDDDocumento88 paginePDDapi-336689769Nessuna valutazione finora
- Oen CP PPTDocumento27 pagineOen CP PPTEJ5I04Akshay BadiwaleNessuna valutazione finora
- Powered ExoskeletonDocumento22 paginePowered ExoskeletonSarfaras Ali K100% (1)
- Hacking, Ian - Canguilhem Amid The CyborgsDocumento16 pagineHacking, Ian - Canguilhem Amid The CyborgsmafeNessuna valutazione finora
- Granulating Machine, Granulators Granulator Machines, Granulators For Pharmaceutical, Pharmaceutical Injection Moulding Machines, Mumbai, IndiaDocumento3 pagineGranulating Machine, Granulators Granulator Machines, Granulators For Pharmaceutical, Pharmaceutical Injection Moulding Machines, Mumbai, Indiagreenlite16Nessuna valutazione finora
- RTSM-AD Lab Sand Mill User ManualDocumento24 pagineRTSM-AD Lab Sand Mill User ManualTom TraviNessuna valutazione finora
- HIRARC ReportDocumento1 paginaHIRARC ReportThanes RawNessuna valutazione finora
- Myp Year 1 Design 6: 2014 - 2015 Scope and Sequence: August-DecemberDocumento2 pagineMyp Year 1 Design 6: 2014 - 2015 Scope and Sequence: August-DecemberSyeda Fatima TanveerNessuna valutazione finora
- Basic Conception of AutomationDocumento41 pagineBasic Conception of AutomationHarriz ZrNessuna valutazione finora
- 0076J1 (330500)Documento47 pagine0076J1 (330500)susealiNessuna valutazione finora
- Robotics QuizDocumento1 paginaRobotics QuizCary B. EscabarteNessuna valutazione finora
- Operating Manual: Aligner Device-850Documento15 pagineOperating Manual: Aligner Device-850atya ragabNessuna valutazione finora