Potrebbero piacerti anche
- Regulación Electrónica Diésel EDCDocumento6 pagineRegulación Electrónica Diésel EDCEdwin ApazaNessuna valutazione finora
- Bombas LinealesDocumento15 pagineBombas LinealesAlder Rios GoicocheaNessuna valutazione finora
- Guía de Práctica Suspensión ElectrónicaDocumento11 pagineGuía de Práctica Suspensión ElectrónicaJorge Alberto Moran SilvaNessuna valutazione finora
- Ingenieria de ControlDocumento9 pagineIngenieria de ControlYaair RamirezNessuna valutazione finora
- Sensor EsDocumento6 pagineSensor EsmaximilianoNessuna valutazione finora
- Common RailDocumento4 pagineCommon RailMarco TrejoNessuna valutazione finora
- Control Servo ElectrohidráulicoDocumento28 pagineControl Servo Electrohidráulicoisraelmh150887100% (3)
- Félix GonzálezDocumento2 pagineFélix GonzálezFelix GonzalezNessuna valutazione finora
- Control Del Sistema Con EDCDocumento7 pagineControl Del Sistema Con EDCRommel TorocahuaNessuna valutazione finora
- Acople Con Embrague Multidisco y ElectromagnéticoDocumento4 pagineAcople Con Embrague Multidisco y ElectromagnéticoJesus David Otero DurangoNessuna valutazione finora
- Informe de SenosresDocumento26 pagineInforme de Senosresstalin TeranNessuna valutazione finora
- Laboratorio 1Documento17 pagineLaboratorio 1Natalia CardonaNessuna valutazione finora
- AUTOMÁTICADocumento31 pagineAUTOMÁTICAMarga RamirezNessuna valutazione finora
- Regulador Electrico de Velocidad de Un Motor DieselDocumento4 pagineRegulador Electrico de Velocidad de Un Motor DieselJoel De OuyangNessuna valutazione finora
- Tipos de Acción de ControlDocumento4 pagineTipos de Acción de ControlLeoger Jesús Villamizar RamosNessuna valutazione finora
- Reporte Práctica Función de TransferenciaDocumento20 pagineReporte Práctica Función de TransferenciaDiego HernándezNessuna valutazione finora
- Agregados Del MotorDocumento13 pagineAgregados Del MotorEdison Sanchez MaciasNessuna valutazione finora
- Sistema EdcDocumento8 pagineSistema EdcTony MoralesNessuna valutazione finora
- Sensor de Temperatura Del MotorDocumento4 pagineSensor de Temperatura Del Motorpirucho61100% (1)
- EDC Control del sistemaDocumento12 pagineEDC Control del sistemaElias Salgueiro FloresNessuna valutazione finora
- Indicaciones de Instrumentos Del Motor - Docx Profe ChanquiaDocumento5 pagineIndicaciones de Instrumentos Del Motor - Docx Profe ChanquiaFrancisco TeixeiraNessuna valutazione finora
- Sistema Cammon RaillDocumento30 pagineSistema Cammon RaillOmarziño Galarce Briceño100% (1)
- Investigacion Sensores de PresionDocumento4 pagineInvestigacion Sensores de PresionErick MoranNessuna valutazione finora
- Cambio Ravigneaux: esquema generalizadoDocumento10 pagineCambio Ravigneaux: esquema generalizadoantony rafael sarmientoNessuna valutazione finora
- Diseño de Un Servomecanismo de PosiciónDocumento12 pagineDiseño de Un Servomecanismo de PosiciónDiego Vidarte100% (1)
- Practica 3 Control de ProcesosDocumento8 paginePractica 3 Control de ProcesosEver BocanegraNessuna valutazione finora
- Sistemas de Encendido Tipos y ComprobacionesDocumento42 pagineSistemas de Encendido Tipos y ComprobacionesLeo Flores75% (8)
- Encendido Electronico IntegralDocumento11 pagineEncendido Electronico IntegralEd-g Fade Nain100% (1)
- Investigación Unidad 4 InstrumentacionDocumento27 pagineInvestigación Unidad 4 InstrumentacionDanna LopezNessuna valutazione finora
- Pract5 DSMDocumento13 paginePract5 DSMMiguel SalasNessuna valutazione finora
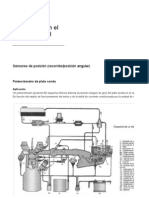
- Sensores en El AutomóvilDocumento17 pagineSensores en El AutomóvilRommel TorocahuaNessuna valutazione finora
- Instrumentacion TransmisoresDocumento6 pagineInstrumentacion TransmisoresRonny R-Go100% (1)
- Bitacora1 Laboratorio Control Balancin Motor HeliceDocumento21 pagineBitacora1 Laboratorio Control Balancin Motor HelicePuig123Nessuna valutazione finora
- Sensor de Posicion de AceleradorDocumento96 pagineSensor de Posicion de AceleradorFitner Soto Paccori100% (1)
- Sistemas de control de aire acondicionado: tipos y selecciónDocumento68 pagineSistemas de control de aire acondicionado: tipos y selecciónisrael jorge torrico100% (3)
- Sensores EdcDocumento2 pagineSensores EdcPancho MorilloNessuna valutazione finora
- MotorDocumento3 pagineMotorMiguel Ignacio Cabrera PerezNessuna valutazione finora
- Identificación de Etapas Del Sistema de ControlDocumento16 pagineIdentificación de Etapas Del Sistema de ControlAnonymous RC1uITQS100% (1)
- Elementos Componentes de Un Sistema de ControlDocumento4 pagineElementos Componentes de Un Sistema de Controlian XDNessuna valutazione finora
- TransmisoresDocumento6 pagineTransmisoresCarlos BustosNessuna valutazione finora
- Dirección EléctricaDocumento3 pagineDirección EléctricaAlex Coronado SaucedoNessuna valutazione finora
- Reporte Control de Posición Motor DCDocumento5 pagineReporte Control de Posición Motor DCVictor Amaurys PerezNessuna valutazione finora
- 02 Tipos de SensoresDocumento25 pagine02 Tipos de SensoresJosé ÁlvarezNessuna valutazione finora
- Trabajo de Investigación Máquinas EléctricasDocumento9 pagineTrabajo de Investigación Máquinas EléctricasPolo Eduardo Medrano TéllezNessuna valutazione finora
- Gestion ElectronicaDocumento52 pagineGestion ElectronicaivonNessuna valutazione finora
- Sensores de PosicionDocumento11 pagineSensores de Posiciongonzalezlazaro550% (2)
- Control de Motores ResumenDocumento13 pagineControl de Motores ResumenErick jh Herrera CondoriNessuna valutazione finora
- Encendido Electronico IntegralDocumento57 pagineEncendido Electronico IntegralVicente Mario Torres HuarayaNessuna valutazione finora
- Ball and BeamDocumento15 pagineBall and BeamMich LetoGalvezNessuna valutazione finora
- TESIS Gabriel - NuevaDocumento8 pagineTESIS Gabriel - NuevaalexNessuna valutazione finora
- Sistema de transferencia automática eléctricaDocumento7 pagineSistema de transferencia automática eléctricaHéctor HernándezNessuna valutazione finora
- Gestion Electronica DieselDocumento28 pagineGestion Electronica DieselTeresa Marina PeraltaNessuna valutazione finora
- Foro TematicoDocumento9 pagineForo Tematicoluisgustavo segurachavezNessuna valutazione finora
- Tarea 4Documento10 pagineTarea 4hennyNessuna valutazione finora
- La Medición de La Velocidad en La IndustriaDocumento4 pagineLa Medición de La Velocidad en La IndustriaAbraham Alejandro Lopez MoralesNessuna valutazione finora
- Regulación de Velocidad de Una Central A VaporDocumento39 pagineRegulación de Velocidad de Una Central A VaporCamilo AraujoNessuna valutazione finora
- Sensores de VehiculosDocumento25 pagineSensores de VehiculosLuis Martinez SanchezNessuna valutazione finora
- Motor MonofásicoDocumento9 pagineMotor MonofásicoOscar Alexandro García AriasNessuna valutazione finora
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDa EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoValutazione: 4 su 5 stelle4/5 (4)
- MF1161_3 - Electrotécnia para instalaciones térmicasDa EverandMF1161_3 - Electrotécnia para instalaciones térmicasNessuna valutazione finora
- Matriz de CongruenciaDocumento1 paginaMatriz de CongruenciaGerman Diaz AvendañoNessuna valutazione finora
- Reglas Operacion 2016 Sagarpa PDFDocumento517 pagineReglas Operacion 2016 Sagarpa PDFCOSAMARANessuna valutazione finora
- CuestionarioDocumento1 paginaCuestionarioGerman Diaz AvendañoNessuna valutazione finora
- Venti Lad orDocumento1 paginaVenti Lad orGerman Diaz AvendañoNessuna valutazione finora
- Cálculos para La BombaDocumento20 pagineCálculos para La BombaGerman Diaz AvendañoNessuna valutazione finora
- Practica de FrenosDocumento15 paginePractica de FrenosGerman Diaz AvendañoNessuna valutazione finora
- SuspencionDocumento14 pagineSuspencionGerman Diaz AvendañoNessuna valutazione finora
- Como Agregar Un Contacto y Como Mandar Un MensajeDocumento6 pagineComo Agregar Un Contacto y Como Mandar Un MensajeGerman Diaz AvendañoNessuna valutazione finora
- Expo Prueva y Evaluacion 1Documento26 pagineExpo Prueva y Evaluacion 1German Diaz AvendañoNessuna valutazione finora
- Reglamento de Ingeniería SanitariaDocumento18 pagineReglamento de Ingeniería SanitariaMilrobNessuna valutazione finora
- Programación automática de máquinas CNCDocumento84 pagineProgramación automática de máquinas CNCChanel Méndez RamírezNessuna valutazione finora
- Manual CNC Haas VF2Documento164 pagineManual CNC Haas VF2staticfactory9281Nessuna valutazione finora
- Mi PersonalidadDocumento1 paginaMi PersonalidadGerman Diaz AvendañoNessuna valutazione finora
- Investigacion de Hidraulica y Neu.Documento4 pagineInvestigacion de Hidraulica y Neu.German Diaz AvendañoNessuna valutazione finora
- Cuestionario ScaDocumento9 pagineCuestionario ScaGerman Diaz AvendañoNessuna valutazione finora
- Mi PersonalidadDocumento1 paginaMi PersonalidadGerman Diaz AvendañoNessuna valutazione finora
- Aplicador GermanDocumento1 paginaAplicador GermanGerman Diaz AvendañoNessuna valutazione finora
- Expo. Convertidor de ParDocumento10 pagineExpo. Convertidor de ParGerman Diaz AvendañoNessuna valutazione finora
- Sistemadefrenosdetractores 121107230554 Phpapp01Documento24 pagineSistemadefrenosdetractores 121107230554 Phpapp01German Diaz AvendañoNessuna valutazione finora
- Aplicador WendyDocumento1 paginaAplicador WendyGerman Diaz AvendañoNessuna valutazione finora
- Cuestionario ScaDocumento9 pagineCuestionario ScaGerman Diaz AvendañoNessuna valutazione finora
- Cuestionario ScaDocumento9 pagineCuestionario ScaGerman Diaz AvendañoNessuna valutazione finora
- Motor HibridoDocumento30 pagineMotor HibridoGerman Diaz AvendañoNessuna valutazione finora
- Capacitor EsDocumento5 pagineCapacitor EsGerman Diaz AvendañoNessuna valutazione finora
- Importancia Del Sistema de Comunicación UnivarsitarioDocumento1 paginaImportancia Del Sistema de Comunicación UnivarsitarioGerman Diaz AvendañoNessuna valutazione finora
- Historia de Las ComputadorasDocumento2 pagineHistoria de Las ComputadorasGerman Diaz AvendañoNessuna valutazione finora
- Guía Examen de Introducción A La Admo1Documento16 pagineGuía Examen de Introducción A La Admo1German Diaz AvendañoNessuna valutazione finora
- Primer Parcial Dinámica 2012Documento1 paginaPrimer Parcial Dinámica 2012German Diaz AvendañoNessuna valutazione finora
- La Importancia Del Sistema de Comunicación UniversitarioDocumento1 paginaLa Importancia Del Sistema de Comunicación UniversitarioGerman Diaz AvendañoNessuna valutazione finora
- Resumen Video Fontaneria RuralDocumento2 pagineResumen Video Fontaneria RuralNury Palacios HolguinNessuna valutazione finora
- Documento Completo - pdf-PDFADocumento2 pagineDocumento Completo - pdf-PDFAAnthony ToribioNessuna valutazione finora
- Voge 300DS Manual de UsuarioDocumento29 pagineVoge 300DS Manual de UsuarioCarlos DiazNessuna valutazione finora
- 0.0 Manual EstudianteDocumento272 pagine0.0 Manual EstudianteOswaldo Caceres GonzalezNessuna valutazione finora
- Inv Maquinaria PesadaDocumento28 pagineInv Maquinaria Pesadaulises pachecoNessuna valutazione finora
- Problemas Propuestos TAREA 1Documento2 pagineProblemas Propuestos TAREA 1Edwin Mejia ReyesNessuna valutazione finora
- Plan de Emergencia AngloAmerican El SoldadoDocumento96 paginePlan de Emergencia AngloAmerican El SoldadoJonathan GómezNessuna valutazione finora
- Cambio de Tubo de Retorno en Refrigerador Mabe Gris Con Fuga! - YouTube PDFDocumento1 paginaCambio de Tubo de Retorno en Refrigerador Mabe Gris Con Fuga! - YouTube PDFManuel Rios OsorioNessuna valutazione finora
- Transporte Hidraulico y NeumaticoDocumento41 pagineTransporte Hidraulico y NeumaticoBryan VillegasNessuna valutazione finora
- Máquina eléctricaJJJJJDocumento100 pagineMáquina eléctricaJJJJJGuido Edwin Apaza HuancoNessuna valutazione finora
- Norma Técnica Colombiana 2303Documento8 pagineNorma Técnica Colombiana 2303randithiaNessuna valutazione finora
- Ley de OhmDocumento6 pagineLey de Ohmphuamaliasarango26Nessuna valutazione finora
- Cap 1 - Circuitos Magnéticos en Corriente Alterna - 2019-II PDFDocumento32 pagineCap 1 - Circuitos Magnéticos en Corriente Alterna - 2019-II PDFCarlosRojasPNessuna valutazione finora
- Combustibles Sólidos. Capítulo 1. Características Del CoqueDocumento8 pagineCombustibles Sólidos. Capítulo 1. Características Del CoqueSiranaki100% (2)
- Informe Abas T-2Documento23 pagineInforme Abas T-2Wilsom Carrera TerronesNessuna valutazione finora
- Balance de Masa Alto HornoDocumento3 pagineBalance de Masa Alto HornoEduardo Santiago LucasNessuna valutazione finora
- Especificaciones Tecnicas de Combustion InternaDocumento20 pagineEspecificaciones Tecnicas de Combustion InternaLuis Javier Castillon67% (3)
- Definición, Justificación e Importancia Del Mantenimiento en Los Equipos de Bombeo de Conducción de AguaDocumento6 pagineDefinición, Justificación e Importancia Del Mantenimiento en Los Equipos de Bombeo de Conducción de Aguafreddy RodriguezNessuna valutazione finora
- Sesión 03. Mecanismos de RotaciónDocumento10 pagineSesión 03. Mecanismos de Rotacióncarlos rodriguez bartoloNessuna valutazione finora
- 22.06.28 TDR Tercería - v. 2.0Documento25 pagine22.06.28 TDR Tercería - v. 2.0mario hernandezNessuna valutazione finora
- Guía de Laboratorio de Carga y Descarga de Un CondensadorDocumento5 pagineGuía de Laboratorio de Carga y Descarga de Un CondensadoryuranyNessuna valutazione finora
- Sistema de Prevencion de ReventonesDocumento2 pagineSistema de Prevencion de ReventonesSuweei Glezz AleemanNessuna valutazione finora
- Boletin # 3 Diferencia Entre Dos Vias y Tres ViasDocumento4 pagineBoletin # 3 Diferencia Entre Dos Vias y Tres ViasSCERVANTESLUISNessuna valutazione finora
- CajaDocumento11 pagineCajaGAlberto VillaPerezNessuna valutazione finora
- C.P. Semana 02Documento317 pagineC.P. Semana 02FRANZ ANTHONY CHINCHAY CHAVEZNessuna valutazione finora
- BT 501Documento1 paginaBT 501alfa24161305Nessuna valutazione finora
- Plan de Restablecimiento Del Área Operativa Norte Del Año 2021 - 2022 Grupo 2Documento83 paginePlan de Restablecimiento Del Área Operativa Norte Del Año 2021 - 2022 Grupo 2Gerson ChaconNessuna valutazione finora
- Prelaboratorio (Quimica) Qué Es El Azufre?Documento1 paginaPrelaboratorio (Quimica) Qué Es El Azufre?Jorge HernandezNessuna valutazione finora
- Fusibles y RelevadoresDocumento22 pagineFusibles y RelevadoresEdgar Santiago FranciscoNessuna valutazione finora
- Procesos Miscibles de Recuperacion MejoradaDocumento24 pagineProcesos Miscibles de Recuperacion Mejoradawilly willy100% (2)