Potrebbero piacerti anche
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsDa EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Buck Converter: 1 Theory of OperationDocumento11 pagineBuck Converter: 1 Theory of OperationYugendra RNessuna valutazione finora
- EE 241 Experiment 5: Boost ConverterDocumento4 pagineEE 241 Experiment 5: Boost ConverterMiguel-Josephine ArmamentoNessuna valutazione finora
- DC Chopper PDFDocumento37 pagineDC Chopper PDFmadhubalagangapureNessuna valutazione finora
- DC ChopperDocumento37 pagineDC ChopperAnuroopNessuna valutazione finora
- Buck ConverterDocumento8 pagineBuck Converterhamza abdo mohamoudNessuna valutazione finora
- Switch Mode Power Supply (SMPS) Topologies (Part II)Documento108 pagineSwitch Mode Power Supply (SMPS) Topologies (Part II)Willie WalkerNessuna valutazione finora
- Buck Converter Step-Down Converter: X in XDocumento12 pagineBuck Converter Step-Down Converter: X in Xkashiub100% (1)
- CUK ConverterDocumento4 pagineCUK Converterranjitheee1292Nessuna valutazione finora
- Switching Losses PDFDocumento4 pagineSwitching Losses PDFleonardo_arévalo_28Nessuna valutazione finora
- Basics of Buck Boost BasicsDocumento11 pagineBasics of Buck Boost BasicsAnil KoulNessuna valutazione finora
- Public A CaoDocumento23 paginePublic A CaoShaheer DurraniNessuna valutazione finora
- Designing A Boost-Switching Regulator With The MCP1650Documento0 pagineDesigning A Boost-Switching Regulator With The MCP1650Asad MalikNessuna valutazione finora
- AEI Power Module 3 NoteDocumento35 pagineAEI Power Module 3 NoteNandu JagguNessuna valutazione finora
- Topic 3 LynchDocumento26 pagineTopic 3 Lynchsunil251Nessuna valutazione finora
- Conv DC-DC Paper ENglishDocumento5 pagineConv DC-DC Paper ENglishpepe890305Nessuna valutazione finora
- SEPIC ConverterDocumento16 pagineSEPIC ConverterDina GaranNessuna valutazione finora
- DC-DC Converter BasicsDocumento15 pagineDC-DC Converter BasicsmsholihulhadiNessuna valutazione finora
- Basic Switching CircuitsDocumento19 pagineBasic Switching Circuitsash1968Nessuna valutazione finora
- Of Loop AC: Design Feedback in Unity Power Factor To DC ConverterDocumento9 pagineOf Loop AC: Design Feedback in Unity Power Factor To DC ConverterEjaz AhmedNessuna valutazione finora
- 4 SMPS ConvertersDocumento6 pagine4 SMPS ConvertersChristine AllenNessuna valutazione finora
- Power Electronics L2 ConvertersDocumento6 paginePower Electronics L2 ConvertersBakri BugaNessuna valutazione finora
- Ee366 Chap 4 2Documento28 pagineEe366 Chap 4 2Michael Adu-boahen50% (2)
- ConvertersDocumento25 pagineConverterssraj009Nessuna valutazione finora
- My ProjectDocumento5 pagineMy ProjectSashank KumarNessuna valutazione finora
- Laporan Boost AisDocumento20 pagineLaporan Boost Aisdedy SetyoNessuna valutazione finora
- Learn How To Design A High-Frequency Power Transformer Using Forward TopologyDocumento3 pagineLearn How To Design A High-Frequency Power Transformer Using Forward TopologyNiranjan kumarNessuna valutazione finora
- Buck Converter AnalysisDocumento4 pagineBuck Converter AnalysisJan Rafael EusebioNessuna valutazione finora
- ZVSDocumento28 pagineZVS12BACAUNessuna valutazione finora
- Buck ConverterDocumento31 pagineBuck Converterbalak144Nessuna valutazione finora
- Switching Regulator Fundamentals: Application ReportDocumento28 pagineSwitching Regulator Fundamentals: Application Reportbookreader1968Nessuna valutazione finora
- Current Commutated Chopper Through SimulinkDocumento54 pagineCurrent Commutated Chopper Through SimulinkAbhijeetSinha100% (1)
- L-17 (Types of Basic DC-DC Converters)Documento11 pagineL-17 (Types of Basic DC-DC Converters)Roberto HidroboNessuna valutazione finora
- Answers of Power Electronics NewDocumento9 pagineAnswers of Power Electronics NewSyed ZabiullahNessuna valutazione finora
- Buck ConverterDocumento5 pagineBuck ConverterM Zeeshan WazirNessuna valutazione finora
- Voltage Controlled OscillatorDocumento7 pagineVoltage Controlled Oscillatorjonesy5000Nessuna valutazione finora
- Ex No:6 Modelling and Simulation of Buck and Boost Converter 10.11.2014Documento6 pagineEx No:6 Modelling and Simulation of Buck and Boost Converter 10.11.2014dhineshpNessuna valutazione finora
- Choppers & Ac ControllersDocumento28 pagineChoppers & Ac Controllersves vegasNessuna valutazione finora
- Effect of Source InductanceDocumento10 pagineEffect of Source Inductancemeeravali_snNessuna valutazione finora
- DC To AC InverterDocumento5 pagineDC To AC InverterRexy RamadhanNessuna valutazione finora
- Laboratory Nr.7Documento5 pagineLaboratory Nr.7IonutNessuna valutazione finora
- Zero Voltage Switching Resonant Power Devices by Bill AndrecakDocumento28 pagineZero Voltage Switching Resonant Power Devices by Bill AndrecakRekhamtrNessuna valutazione finora
- Slua 121Documento4 pagineSlua 121Chinedu EgbusiriNessuna valutazione finora
- Relation Between V and V in Continuous Conduction: EE462L, Power Electronics, DC-DC Buck ConverterDocumento16 pagineRelation Between V and V in Continuous Conduction: EE462L, Power Electronics, DC-DC Buck Converterbill gatesNessuna valutazione finora
- Buck-Boost Converter: Principle of OperationDocumento9 pagineBuck-Boost Converter: Principle of OperationRohanMishraNessuna valutazione finora
- Power Electronic Module - Chapter 3Documento34 paginePower Electronic Module - Chapter 3jayxcellNessuna valutazione finora
- VVV VV V V VDocumento2 pagineVVV VV V V Vfrizbee45Nessuna valutazione finora
- Buck - Boost ConverterDocumento9 pagineBuck - Boost Converterhamza abdo mohamoud100% (1)
- Ac Fundamnetals ManualDocumento12 pagineAc Fundamnetals ManualRaj Mehra MeharNessuna valutazione finora
- REPORTDocumento6 pagineREPORTchienphamminh2003Nessuna valutazione finora
- PSCAD Power System Lab ManualDocumento23 paginePSCAD Power System Lab ManualShiva Kumar100% (2)
- Buck ConvertersDocumento4 pagineBuck ConvertersAbenav SankarNessuna valutazione finora
- ZvsDocumento29 pagineZvsSandy RonaldoNessuna valutazione finora
- Batch 2 PE CEP Report 2Documento10 pagineBatch 2 PE CEP Report 2Mohsin IqbalNessuna valutazione finora
- Electro PrincipeDocumento58 pagineElectro PrincipeShahzaid AhmadNessuna valutazione finora
- Overlap in Rectifiers Overlap in Rectifiers: Advance Power Electronics Advance Power ElectronicsDocumento10 pagineOverlap in Rectifiers Overlap in Rectifiers: Advance Power Electronics Advance Power ElectronicsJunaid AlviNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Features Description: Ltc3536 1A Low Noise, Buck-Boost DC/DC ConverterDocumento28 pagineFeatures Description: Ltc3536 1A Low Noise, Buck-Boost DC/DC ConverternevdullNessuna valutazione finora
- How Will Climate Change Affect The Cairns Region?Documento2 pagineHow Will Climate Change Affect The Cairns Region?kurabyqld100% (1)
- Ucc3941 5Documento20 pagineUcc3941 5kurabyqldNessuna valutazione finora
- Low Frequency CapacitorsDocumento3 pagineLow Frequency CapacitorskurabyqldNessuna valutazione finora
- APL 2009 RateequationanalysisDocumento3 pagineAPL 2009 RateequationanalysiskurabyqldNessuna valutazione finora
- P578Documento1 paginaP578Anonymous 0YEApBuZINessuna valutazione finora
- 0115Documento7 pagine0115kurabyqldNessuna valutazione finora
- Apl 2002 Electronic CharacDocumento3 pagineApl 2002 Electronic CharackurabyqldNessuna valutazione finora
- 65 Caprio ElecLett 1973Documento2 pagine65 Caprio ElecLett 1973kurabyqldNessuna valutazione finora
- 15 Thomsen ISSCC 2000Documento2 pagine15 Thomsen ISSCC 2000kurabyqldNessuna valutazione finora
- JAP1998 Nonvolatilememory Ac NitrogendopedDocumento5 pagineJAP1998 Nonvolatilememory Ac NitrogendopedkurabyqldNessuna valutazione finora
- Pronouns EnglishDocumento13 paginePronouns EnglishMihai AlexxNessuna valutazione finora
- Azeez SramlimitsDocumento4 pagineAzeez SramlimitskurabyqldNessuna valutazione finora
- 0217Documento1 pagina0217kurabyqldNessuna valutazione finora
- Logicworks4 TutorialDocumento10 pagineLogicworks4 TutorialAbdullah HasanNessuna valutazione finora
- NanoMat12 Optional Paper 01bDocumento6 pagineNanoMat12 Optional Paper 01bkurabyqldNessuna valutazione finora
- ECE 304: Iterative Design of Feedback Network: SchematicDocumento6 pagineECE 304: Iterative Design of Feedback Network: SchematickurabyqldNessuna valutazione finora
- 13.1 A Fully-Integrated Single-Chip SOC For BluetoothDocumento3 pagine13.1 A Fully-Integrated Single-Chip SOC For BluetoothkurabyqldNessuna valutazione finora
- Fully DepletedDocumento4 pagineFully DepletedkurabyqldNessuna valutazione finora
- Abstract ISSCC2011 SC2 AbstractDocumento1 paginaAbstract ISSCC2011 SC2 AbstractkurabyqldNessuna valutazione finora
- 30 Bollati JSSC 2001Documento11 pagine30 Bollati JSSC 2001kurabyqldNessuna valutazione finora
- Integrator's Time ConstantsDocumento2 pagineIntegrator's Time ConstantskurabyqldNessuna valutazione finora
- 2 Kinget CICC 2008Documento6 pagine2 Kinget CICC 2008kurabyqldNessuna valutazione finora
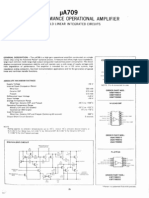
- 709 Op AmpDocumento7 pagine709 Op AmpWuttichai KiamNessuna valutazione finora
- New F820 Survival Magnesium Flint Fire Steel Starter Start StickDocumento4 pagineNew F820 Survival Magnesium Flint Fire Steel Starter Start StickkurabyqldNessuna valutazione finora
- Abstract ISSCC2011 SC1 AbstractDocumento1 paginaAbstract ISSCC2011 SC1 AbstractkurabyqldNessuna valutazione finora
- Transactions Briefs: Improved Switched Tuning of Differential Cmos VcosDocumento4 pagineTransactions Briefs: Improved Switched Tuning of Differential Cmos VcoskurabyqldNessuna valutazione finora
- Analysis and Optimization of Accumulation-Mode Varactor For RFDocumento2 pagineAnalysis and Optimization of Accumulation-Mode Varactor For RFkurabyqldNessuna valutazione finora
- PLCC Lightbar Modules (IP67) - Eng - v2Documento0 paginePLCC Lightbar Modules (IP67) - Eng - v2kurabyqldNessuna valutazione finora
- Calibration Howden LPI SystemDocumento5 pagineCalibration Howden LPI Systemanyelit2021Nessuna valutazione finora
- Solid State ContactorsDocumento2 pagineSolid State ContactorsRafael ChourioNessuna valutazione finora
- Shipment ListDocumento2 pagineShipment ListArno ThasNessuna valutazione finora
- Esquema de MierdaDocumento4 pagineEsquema de MierdaRaul RozasNessuna valutazione finora
- Inhemeter Smart Grid Solution-InheGrid-DA 180312Documento63 pagineInhemeter Smart Grid Solution-InheGrid-DA 180312chykemanNessuna valutazione finora
- XMR AzDocumento9 pagineXMR AzbitconceptsNessuna valutazione finora
- 11 Thyripol Main Project FileDocumento11 pagine11 Thyripol Main Project FileKirankumar Reddy100% (1)
- Single Pole: Item Description Back To IndexDocumento1 paginaSingle Pole: Item Description Back To IndexAbdul RafaeNessuna valutazione finora
- Pioneer Brochure PDFDocumento4 paginePioneer Brochure PDFrortegablanco87Nessuna valutazione finora
- Catalogue tr-7543Documento2 pagineCatalogue tr-7543arupamguria05Nessuna valutazione finora
- MIE12175-STS - FAMILY - APPLICATION - GUIDE Manual Completo AGOSTO 2014Documento305 pagineMIE12175-STS - FAMILY - APPLICATION - GUIDE Manual Completo AGOSTO 2014cachilet100% (1)
- Planning, Operation and Maintenance of Power Generation ProjectsDocumento2 paginePlanning, Operation and Maintenance of Power Generation ProjectskeikodavilaNessuna valutazione finora
- Top 246 YnDocumento52 pagineTop 246 YnlewisneoNessuna valutazione finora
- Horno de Microondas Sharp R242dpaDocumento36 pagineHorno de Microondas Sharp R242dpaErick Rodriguez100% (1)
- Beles Log Sheet &15 MinitDocumento32 pagineBeles Log Sheet &15 MinitWoldemariam WorkuNessuna valutazione finora
- Disconnectors Design PDFDocumento14 pagineDisconnectors Design PDFiprao0% (1)
- 1176 PDFDocumento169 pagine1176 PDFJoshua PalizaNessuna valutazione finora
- 3-Way Switch English PDFDocumento7 pagine3-Way Switch English PDFSafnas KariapperNessuna valutazione finora
- DataWatch November 2013Documento45 pagineDataWatch November 2013ZE PowerGroup Inc.Nessuna valutazione finora
- Martin M2K Repair and Replace Main PCBDocumento6 pagineMartin M2K Repair and Replace Main PCBlupteiNessuna valutazione finora
- Frame 8124B Winding 6S: Arep/PmgDocumento3 pagineFrame 8124B Winding 6S: Arep/PmgscribdledeeNessuna valutazione finora
- Siemens Trip RelayDocumento8 pagineSiemens Trip RelayS. M. Touhidur RahmanNessuna valutazione finora
- 2017 Gps Product CatalogDocumento60 pagine2017 Gps Product CatalogAzhar1109100% (1)
- Earth Resistance TesterDocumento2 pagineEarth Resistance TesterRa ArNessuna valutazione finora
- Inverter Cum ChargerDocumento22 pagineInverter Cum ChargerDIPAK VINAYAK SHIRBHATE100% (6)
- Static Kramer Drive - T.moodleyDocumento14 pagineStatic Kramer Drive - T.moodleyThuven Moodley100% (1)
- S2A F Datasheet en GBDocumento4 pagineS2A F Datasheet en GBAzhar AliNessuna valutazione finora
- mc61c PDFDocumento32 paginemc61c PDFashishchugh44Nessuna valutazione finora
- Kodak OGS5.6 ManualDocumento83 pagineKodak OGS5.6 ManualThato MpetaNessuna valutazione finora