Potrebbero piacerti anche
- Ethernet IP Texas InstrumentsDocumento6 pagineEthernet IP Texas InstrumentsFranzKafkaNessuna valutazione finora
- Uhc AwatersDocumento60 pagineUhc Awaterskammu9713Nessuna valutazione finora
- Calculation of Short-Circuit CurrentsDocumento35 pagineCalculation of Short-Circuit CurrentsdaodoquangNessuna valutazione finora
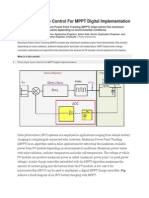
- Direct Duty Cycle Control For MPPT Digital ImplementationDocumento5 pagineDirect Duty Cycle Control For MPPT Digital ImplementationPhạm Văn TưởngNessuna valutazione finora
- Disturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignDocumento10 pagineDisturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignPhạm Văn TưởngNessuna valutazione finora
- Evaluation and DSP Based Implementation of PWM Approaches For SinDocumento90 pagineEvaluation and DSP Based Implementation of PWM Approaches For SinPhạm Văn TưởngNessuna valutazione finora
- Tutorial Digital Control Loop DesignDocumento17 pagineTutorial Digital Control Loop DesignPhạm Văn TưởngNessuna valutazione finora
- Ect129 Uninterruptible Static Power Supplies and The Protection of PersonsDocumento44 pagineEct129 Uninterruptible Static Power Supplies and The Protection of PersonsMarko VujicaNessuna valutazione finora
- All About HarmonicsDocumento240 pagineAll About HarmonicsKhushal KharadeNessuna valutazione finora
- Control Intelligence Improves Renewable Energy EfficiencyDocumento7 pagineControl Intelligence Improves Renewable Energy EfficiencyPhạm Văn TưởngNessuna valutazione finora
- The Adventures of Huckleberry Finn by Mark TwainDocumento289 pagineThe Adventures of Huckleberry Finn by Mark TwainBooks100% (5)
- Slaa 075Documento19 pagineSlaa 075Manidhar ParvatamNessuna valutazione finora
- 309 An 09 Solar Panel PowerDocumento3 pagine309 An 09 Solar Panel PowerJoel Medina GuttiNessuna valutazione finora
- AN296110 Current Sensing For Renewable EnergyDocumento4 pagineAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngNessuna valutazione finora
- C Programming For Embedded System Applications PDFDocumento54 pagineC Programming For Embedded System Applications PDFWendo David PesaNessuna valutazione finora
- IEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityDocumento7 pagineIEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityPhạm Văn TưởngNessuna valutazione finora
- An Improved PV Battery Charger For Low Cost Low PowerDocumento4 pagineAn Improved PV Battery Charger For Low Cost Low PowerPhạm Văn TưởngNessuna valutazione finora
- Current-Transformer Phase-Shift Compensation and CalibrationDocumento7 pagineCurrent-Transformer Phase-Shift Compensation and CalibrationrsrtnjNessuna valutazione finora
- IEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsDocumento9 pagineIEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsPhạm Văn TưởngNessuna valutazione finora
- (Matsui) Sensorless PM Brushless DC Motor DrivesDocumento9 pagine(Matsui) Sensorless PM Brushless DC Motor DrivesPhạm Văn TưởngNessuna valutazione finora
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDocumento9 pagineUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngNessuna valutazione finora
- 1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemsDocumento6 pagine1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemschethanNessuna valutazione finora
- Informatics in Control Automation and RoboticsDocumento5 pagineInformatics in Control Automation and RoboticsPhạm Văn TưởngNessuna valutazione finora
- A Novel Dynamic Var CompensatorDocumento4 pagineA Novel Dynamic Var CompensatorPhạm Văn TưởngNessuna valutazione finora
- NHSPE ReadingDocumento5 pagineNHSPE ReadingMohamed HanafiNessuna valutazione finora
- TW Exams Ielts How To Prepare Ielts TipsDocumento2 pagineTW Exams Ielts How To Prepare Ielts TipsHoda ElhadaryNessuna valutazione finora
- Study of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuDocumento8 pagineStudy of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuPhạm Văn Tưởng100% (1)
- Inverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewDocumento6 pagineInverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewPhạm Văn TưởngNessuna valutazione finora
- Space Vector Modulation An IntroductionDocumento10 pagineSpace Vector Modulation An IntroductionJohan LinderNessuna valutazione finora
- Phan Tich 1 Bai Task 2 by Ngoc BachDocumento4 paginePhan Tich 1 Bai Task 2 by Ngoc BachPhạm Văn Tưởng100% (1)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5782)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Unit 3 Potentiometry-II (PH Metry)Documento24 pagineUnit 3 Potentiometry-II (PH Metry)Nathanian100% (1)
- Dye Penetrant InspectionDocumento18 pagineDye Penetrant InspectionMidhun K ChandraboseNessuna valutazione finora
- Unit 2 MCB Key PDFDocumento19 pagineUnit 2 MCB Key PDFDafne Fertig88% (32)
- Hatch Cover Analysis of Capesize Bulk CarriersDocumento6 pagineHatch Cover Analysis of Capesize Bulk CarriersBasem TamNessuna valutazione finora
- Finite Difference Solution of Seepage Equation: A Mathematical Model For Fluid FlowDocumento9 pagineFinite Difference Solution of Seepage Equation: A Mathematical Model For Fluid FlowthesijNessuna valutazione finora
- Contacts Modeling in AnsysDocumento74 pagineContacts Modeling in Ansyssudhirm16100% (2)
- COT Science 6 Q3 DLP-simple Machine - PPTX Version 1Documento75 pagineCOT Science 6 Q3 DLP-simple Machine - PPTX Version 1Bryan Bangiban83% (18)
- Ordinary Level Heat NotesDocumento44 pagineOrdinary Level Heat Notespatrick omonyNessuna valutazione finora
- Magnetic Field and Magnetic Effects of Current: Assignment 2Documento2 pagineMagnetic Field and Magnetic Effects of Current: Assignment 2HaRryNessuna valutazione finora
- AS (GCE) Instant Revision of ChemistryDocumento130 pagineAS (GCE) Instant Revision of ChemistryOlivia Panterka Vainilla100% (4)
- Doucet, de Freitas, Gordon - An Introduction To Sequential Monte Carlo MethodsDocumento12 pagineDoucet, de Freitas, Gordon - An Introduction To Sequential Monte Carlo MethodsevgeniaNessuna valutazione finora
- The Finite Element Method (Fem) : 1.1 Galerkin FormulationDocumento13 pagineThe Finite Element Method (Fem) : 1.1 Galerkin FormulationCarlos Gulbenkian GaldamesNessuna valutazione finora
- Diffusivity Equation: 13 February 2008Documento17 pagineDiffusivity Equation: 13 February 2008Yaser RashedNessuna valutazione finora
- Theory of Time MachineDocumento127 pagineTheory of Time MachineUday HiwaraleNessuna valutazione finora
- OMAE2018 ProgramDocumento124 pagineOMAE2018 ProgramTahsin TezdoganNessuna valutazione finora
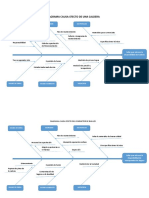
- Caldera causa-efecto diagrama mantenimiento fallasDocumento2 pagineCaldera causa-efecto diagrama mantenimiento fallasDaniel Will Morales GuerreroNessuna valutazione finora
- Matrix Acidizing Course PDFDocumento74 pagineMatrix Acidizing Course PDFBehzad Hosseinzadeh100% (1)
- Algebra PDFDocumento2 pagineAlgebra PDFpalle sandhyaNessuna valutazione finora
- j124 Cmame CardDocumento11 paginej124 Cmame CardmkbNessuna valutazione finora
- Precast Bridge DeckDocumento4 paginePrecast Bridge DeckPaul_delgadoNessuna valutazione finora
- Guia ExensDocumento16 pagineGuia ExensPedro Betancourt100% (1)
- Determination of The Surface Tension of Liquid Stainless SteelDocumento5 pagineDetermination of The Surface Tension of Liquid Stainless SteelĐào ThườngNessuna valutazione finora
- BS 6166-1Documento12 pagineBS 6166-1FEKINessuna valutazione finora
- FRP Column AbaqusDocumento14 pagineFRP Column AbaqusAlvin PurmawinataNessuna valutazione finora
- Chapter 4Documento9 pagineChapter 4dearsaswatNessuna valutazione finora
- Vibration BookDocumento152 pagineVibration Bookrez_babu7430Nessuna valutazione finora
- Nano Spray Dryer B-90 - Literature Review and ApplicationsDocumento8 pagineNano Spray Dryer B-90 - Literature Review and ApplicationsprinceamitNessuna valutazione finora
- Newton's Laws of Motion ExperimentDocumento3 pagineNewton's Laws of Motion ExperimentMartie DuranaNessuna valutazione finora
- Airy FunctionDocumento10 pagineAiry Functionalokesh1982Nessuna valutazione finora
- Engineering and Chemical Thermodynamics 2e: Chapter 1 SolutionsDocumento41 pagineEngineering and Chemical Thermodynamics 2e: Chapter 1 SolutionsLalo RubioNessuna valutazione finora