Potrebbero piacerti anche
- Detailed Lesson Plan in Mathematics 10 I. Objectives: N R andDocumento8 pagineDetailed Lesson Plan in Mathematics 10 I. Objectives: N R andJesica Blando90% (20)
- Tools for Continuous ImprovementDocumento86 pagineTools for Continuous ImprovementKamal100% (1)
- Sun Series Autoclave Steam SterilizerDocumento12 pagineSun Series Autoclave Steam SterilizeralexisNessuna valutazione finora
- Modbus Protocol UGDocumento33 pagineModbus Protocol UGMuhammad Sa'ad100% (1)
- Design and Functional Verification of I2C Master Core Using OVMDocumento6 pagineDesign and Functional Verification of I2C Master Core Using OVMPraveen Kumar100% (1)
- USB HID 01163aDocumento26 pagineUSB HID 01163aGustavo Circelli100% (1)
- Interfacing Example - 16 Character X 2 Line LCD: DescriptionDocumento5 pagineInterfacing Example - 16 Character X 2 Line LCD: DescriptionManish Kumar sharma100% (1)
- Atmel 2575 C Functions For Reading and Writing To Flash Memory ApplicationNote AVR106Documento14 pagineAtmel 2575 C Functions For Reading and Writing To Flash Memory ApplicationNote AVR106Avadhesh100% (1)
- PIC Tutorial 3Documento10 paginePIC Tutorial 3api-3801984100% (3)
- Maxuino - Starter GuideDocumento5 pagineMaxuino - Starter GuideArvind Singh100% (1)
- PIC Introduction PDFDocumento46 paginePIC Introduction PDFPeeyush Kp100% (1)
- Spi and I2cDocumento11 pagineSpi and I2cAbhay Tomar100% (1)
- ADC Through SPIDocumento4 pagineADC Through SPIChiquita White100% (1)
- Pic Usb - v2Documento23 paginePic Usb - v2Andres Echeverry100% (1)
- 001-57294 AN57294 USB 101 An Introduction To Universal Serial Bus 2.0Documento57 pagine001-57294 AN57294 USB 101 An Introduction To Universal Serial Bus 2.0Arturo Picolin100% (1)
- Nec Ir For PicDocumento14 pagineNec Ir For Picsudhakar5472100% (1)
- Aoc 2436saDocumento45 pagineAoc 2436saatomo33100% (1)
- PIC18 Pulse Width ModulationDocumento16 paginePIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- I2C Protocol in Fpga Using VHDL: Main Project Interim Report As A Partial Fullment of The CurriculumDocumento18 pagineI2C Protocol in Fpga Using VHDL: Main Project Interim Report As A Partial Fullment of The CurriculumShuvra Saha100% (1)
- 8086 PPTDocumento30 pagine8086 PPTKavitha Subramaniam100% (1)
- DS3231 Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description Benefits and FeaturesDocumento20 pagineDS3231 Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description Benefits and Featuresalfian100% (1)
- In-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFDocumento14 pagineIn-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFMauro Vargas100% (2)
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Documento7 pagineHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- AN1310 - BooltloaderDocumento24 pagineAN1310 - BooltloaderRaulsoft100% (1)
- Agribot Project PresentationDocumento21 pagineAgribot Project Presentationumaiya1990100% (1)
- Make The Smartpic Serial Programmer: Feature ArticleDocumento5 pagineMake The Smartpic Serial Programmer: Feature Articlersanchez-100% (1)
- Dynamically Linked Libraries (DLL) TutorialDocumento13 pagineDynamically Linked Libraries (DLL) TutorialSurjanshKumar100% (1)
- Moving Up To ARMDocumento128 pagineMoving Up To ARMlilianfis100% (1)
- PIC Microcontroller ArchitectureDocumento20 paginePIC Microcontroller ArchitecturePeeyush Kp100% (1)
- CCP PWMDocumento19 pagineCCP PWMalaa_saq100% (1)
- Lpi Nano DockDocumento2 pagineLpi Nano Dockmundomusicalmeria100% (1)
- Elc 2014 Usb 0 PDFDocumento96 pagineElc 2014 Usb 0 PDFAhmed Hamouda100% (1)
- LCM Dot Matrix Liquid Crystal Display ModulesDocumento11 pagineLCM Dot Matrix Liquid Crystal Display ModulesAmri Salman Rizal100% (1)
- Overview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia TechDocumento7 pagineOverview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia Techdineshvhaval100% (1)
- Instructions Assembler DirectivespptDocumento22 pagineInstructions Assembler DirectivespptAntra Gurain100% (1)
- USB in A NutShellDocumento35 pagineUSB in A NutShellSandro Jairzinho Carrascal Ayora100% (1)
- ArduiTouch ESP Schematic V01!03!00Documento1 paginaArduiTouch ESP Schematic V01!03!00nhan tt100% (1)
- Bascom and AVR, RS-232Documento10 pagineBascom and AVR, RS-232akbar100% (1)
- PCB Project1 PDFDocumento2 paginePCB Project1 PDFPedro Perez100% (1)
- DHT Temperature and Humidity Sensor Project Using PIC16F628ADocumento8 pagineDHT Temperature and Humidity Sensor Project Using PIC16F628AMarcio Jose Terezinha Belinssi100% (1)
- History of The I2C BusDocumento24 pagineHistory of The I2C BusManoj Kavedia100% (1)
- GND connector for LTE moduleDocumento1 paginaGND connector for LTE modulesyaiful100% (2)
- Using PICKit™ 3 For MPLAB® X IDEDocumento1 paginaUsing PICKit™ 3 For MPLAB® X IDEpopoyboy100% (1)
- IBM - AIX Linking and Loading MechanismDocumento68 pagineIBM - AIX Linking and Loading Mechanismapi-27351105100% (1)
- An1388 Pic32 BootloaderDocumento16 pagineAn1388 Pic32 Bootloadercroud_freak100% (1)
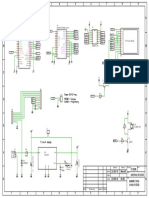
- SCHEMATIC2 LedDriverDocumento1 paginaSCHEMATIC2 LedDriverthanhlinh9191100% (1)
- PCA10059 Schematic and PCBDocumento5 paginePCA10059 Schematic and PCBThanga raj100% (1)
- C++ - When To Use The Brace-Enclosed Initializer - Stack OverflowDocumento5 pagineC++ - When To Use The Brace-Enclosed Initializer - Stack OverflowFrankie Liu100% (1)
- RS232 BoardDocumento1 paginaRS232 BoardZaegor100% (1)
- PT2314Documento4 paginePT2314Yamir Sandoval100% (1)
- 4.6.2 Universal Serial Bus (USB)Documento18 pagine4.6.2 Universal Serial Bus (USB)kollavivek_534195858100% (2)
- USB Chip - Choices Jul2000Documento5 pagineUSB Chip - Choices Jul2000Jameskrazy100% (1)
- ARM GCC Inline Assembler CookbookDocumento7 pagineARM GCC Inline Assembler CookbookBarryXu100% (1)
- Interfacing an HD44780 LCD to a C8051F120 MicrocontrollerDocumento23 pagineInterfacing an HD44780 LCD to a C8051F120 Microcontrollerahimpli100% (2)
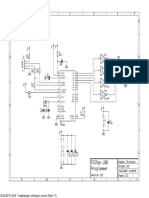
- Picpgm Usb v1.0Documento1 paginaPicpgm Usb v1.0Yudi Ananta Rangkuti100% (1)
- SPI Master Core Specification: Author: Simon SrotDocumento14 pagineSPI Master Core Specification: Author: Simon SrotManoj Kumar100% (1)
- Interfacing Pertemuan 4Documento8 pagineInterfacing Pertemuan 4Armando Agustinus100% (1)
- Open Modbus/TCP Specification SummaryDocumento25 pagineOpen Modbus/TCP Specification SummaryqwerNessuna valutazione finora
- Modicon M241: Logic ControllerDocumento1.004 pagineModicon M241: Logic ControllerryanNessuna valutazione finora
- Modbus Integration Guide enDocumento32 pagineModbus Integration Guide en이태준Nessuna valutazione finora
- REX640 Modbusprot 759121 ENcDocumento96 pagineREX640 Modbusprot 759121 ENcMargarito GarciaNessuna valutazione finora
- 601 Modbusprot 1MDU072231-YN ENaDocumento92 pagine601 Modbusprot 1MDU072231-YN ENaalex pardoNessuna valutazione finora
- MODBUS Protocol User Manual: 30121-83 Rev. 1.0 September, 2015Documento24 pagineMODBUS Protocol User Manual: 30121-83 Rev. 1.0 September, 2015Jhilton Piedra MoyaNessuna valutazione finora
- Schwarzschild 1916 Seminal Paper RevisitedDocumento17 pagineSchwarzschild 1916 Seminal Paper RevisitedKamalNessuna valutazione finora
- Diffferentizl Game Optim PursuitDocumento136 pagineDiffferentizl Game Optim PursuitKamalNessuna valutazione finora
- The Frog's TaleDocumento14 pagineThe Frog's TaleKamalNessuna valutazione finora
- Basic InstrumentDocumento85 pagineBasic InstrumenthaseebmonNessuna valutazione finora
- IS01-Why Do Surge TestingDocumento4 pagineIS01-Why Do Surge TestingKamalNessuna valutazione finora
- Hello World: DDocumento1 paginaHello World: DKamalNessuna valutazione finora
- Challenge ProblemDocumento8 pagineChallenge ProblemKamalNessuna valutazione finora
- Calc Variations With AppDocumento5 pagineCalc Variations With AppKamalNessuna valutazione finora
- ITER enDocumento52 pagineITER enKamalNessuna valutazione finora
- Hello World: DDocumento1 paginaHello World: DKamalNessuna valutazione finora
- Hello WorldDocumento1 paginaHello WorldKamalNessuna valutazione finora
- Heydt Synchronous Mach Sep03Documento113 pagineHeydt Synchronous Mach Sep03ostojic007Nessuna valutazione finora
- Learn How To Tell A JokeDocumento1 paginaLearn How To Tell A JokeKamalNessuna valutazione finora
- Hello WorldDocumento1 paginaHello WorldKamalNessuna valutazione finora
- Static Ex SystemDocumento28 pagineStatic Ex Systemvasanth11kvNessuna valutazione finora
- Excel Lookup FunctionsDocumento4 pagineExcel Lookup FunctionsKamalNessuna valutazione finora
- CIA's Secret Weapons RevealedDocumento5 pagineCIA's Secret Weapons RevealedhotaussieguyNessuna valutazione finora
- Peter ColleryDocumento14 paginePeter ColleryKamalNessuna valutazione finora
- Einstein HoaxDocumento343 pagineEinstein HoaxTS100% (1)
- Astrophysics and Space Science 1995Documento33 pagineAstrophysics and Space Science 1995vasiliu_paulNessuna valutazione finora
- Control TechnologyDocumento16 pagineControl TechnologyVahid kNessuna valutazione finora
- F 16 A B Mid Life Update Production Tape M1 The PilotDocumento246 pagineF 16 A B Mid Life Update Production Tape M1 The PilotKamalNessuna valutazione finora
- Astrophysics and Space Science 1995Documento33 pagineAstrophysics and Space Science 1995vasiliu_paulNessuna valutazione finora
- Physics ConspiracyDocumento179 paginePhysics ConspiracyKamalNessuna valutazione finora
- Microsoft SpyingDocumento20 pagineMicrosoft SpyingKamalNessuna valutazione finora
- Game Theory Lecture Notes Penn State Math 486Documento169 pagineGame Theory Lecture Notes Penn State Math 486hgopalkrishnan100% (1)
- Awarness Issue 94-15Documento39 pagineAwarness Issue 94-15KamalNessuna valutazione finora
- Creativity InnovationDocumento30 pagineCreativity InnovationKamalNessuna valutazione finora
- 100 Words To Impress An ExaminerDocumento13 pagine100 Words To Impress An ExaminerRakib HossainNessuna valutazione finora
- Analysis of Cable-Stayed Bridges Using Fuzzy Finite Element ModelingDocumento227 pagineAnalysis of Cable-Stayed Bridges Using Fuzzy Finite Element ModelingcxwNessuna valutazione finora
- Dbms Case ToolsDocumento1 paginaDbms Case ToolsVaibhav AgarwalNessuna valutazione finora
- Os Lab Manual PDFDocumento81 pagineOs Lab Manual PDFSRIHITHA YELISETTINessuna valutazione finora
- Scholarship Application 2019Documento3 pagineScholarship Application 2019Sterling BlackNessuna valutazione finora
- UCO Reporter, September 2016Documento64 pagineUCO Reporter, September 2016ucopresidentNessuna valutazione finora
- User ManualDocumento21 pagineUser ManualJuan David GilNessuna valutazione finora
- Bbab 13 Ekontek PDFDocumento16 pagineBbab 13 Ekontek PDFeva apriliaNessuna valutazione finora
- Percentix Inc Acquired by Prithvi Information SolutionsDocumento2 paginePercentix Inc Acquired by Prithvi Information Solutionsskin1900Nessuna valutazione finora
- Influencer Media Kit Template (To Use The Template, Click The - File - Tab and Select - Make A Copy. - )Documento3 pagineInfluencer Media Kit Template (To Use The Template, Click The - File - Tab and Select - Make A Copy. - )abdullah bukhamseenNessuna valutazione finora
- Apple Technology To Support Learning For Students With Sensory and Learning DisabilitiesDocumento25 pagineApple Technology To Support Learning For Students With Sensory and Learning Disabilitiesssa_joeNessuna valutazione finora
- Math - Can't Understand The Cost Function For Linear Regression - Stack OverflowDocumento2 pagineMath - Can't Understand The Cost Function For Linear Regression - Stack OverflowriteshNessuna valutazione finora
- User Manual: ACT2000 All-Electric ActuatorDocumento64 pagineUser Manual: ACT2000 All-Electric ActuatorMilo TigNessuna valutazione finora
- 18VLFCZ1 Research Methodology and IprDocumento2 pagine18VLFCZ1 Research Methodology and Iprkruthikah ap100% (1)
- ADC 0808 8-Bit Analog to Digital Converter GuideDocumento6 pagineADC 0808 8-Bit Analog to Digital Converter Guidesrc e-solutionsNessuna valutazione finora
- SAG - VGD NC 3Documento8 pagineSAG - VGD NC 3Jek KejNessuna valutazione finora
- AIS ExamDocumento15 pagineAIS ExamLouie De La Torre100% (1)
- Max Payne 2 CheatsDocumento5 pagineMax Payne 2 Cheatsapi-19810764100% (1)
- The University of Lahore: Course OutlineDocumento6 pagineThe University of Lahore: Course OutlineHadi345214Nessuna valutazione finora
- Null 2Documento85 pagineNull 2FC UKNessuna valutazione finora
- Bacnotan National High SchoolDocumento5 pagineBacnotan National High Schooljoseph delimanNessuna valutazione finora
- Stata Item Response Theory Reference Manual: Release 14Documento199 pagineStata Item Response Theory Reference Manual: Release 14Maria StfNessuna valutazione finora
- Chargeback of Refund in My CreditcardDocumento2 pagineChargeback of Refund in My CreditcardtdxdvnddmfNessuna valutazione finora
- Analyze Prices and Time Using the Shepherd Gann Squares IndicatorDocumento82 pagineAnalyze Prices and Time Using the Shepherd Gann Squares IndicatorCleilson Bandeira100% (1)
- Service Manual of DS Series FullyDocumento64 pagineService Manual of DS Series FullylemmabekeleNessuna valutazione finora
- Cable Protection Systems LatviaDocumento30 pagineCable Protection Systems LatviaÖmer Faruk GÜLNessuna valutazione finora
- Codigo de Fallas BHM Modulo de Tabique M2 112 PDFDocumento53 pagineCodigo de Fallas BHM Modulo de Tabique M2 112 PDFNestor Zela MamaniNessuna valutazione finora
- EmanuelDocumento4 pagineEmanuelbawihpuiapaNessuna valutazione finora
- Hints and Tips For Implementing Storwize V7000 V3.1 30 - JulyDocumento35 pagineHints and Tips For Implementing Storwize V7000 V3.1 30 - JulyFerdinand HalimNessuna valutazione finora