Potrebbero piacerti anche
- Project Awareness of BankingDocumento57 pagineProject Awareness of Bankingfunkisanju1Nessuna valutazione finora
- British Commercial Computer Digest: Pergamon Computer Data SeriesDa EverandBritish Commercial Computer Digest: Pergamon Computer Data SeriesNessuna valutazione finora
- Limpieza Celulas Cerebrales Con VibroacusticaDocumento23 pagineLimpieza Celulas Cerebrales Con Vibroacusticapillen9Nessuna valutazione finora
- Project On Industrial Visit: Production Process and Inventory ManagementDocumento13 pagineProject On Industrial Visit: Production Process and Inventory ManagementMahesh GorasiaNessuna valutazione finora
- Prodis Presentation - EnglishDocumento7 pagineProdis Presentation - EnglishIon PlesaNessuna valutazione finora
- LNS 2011 1 840 PSBDocumento20 pagineLNS 2011 1 840 PSBLim Chon HuatNessuna valutazione finora
- 2 Resolution - Acts of Lasciviousness - AumanDocumento3 pagine2 Resolution - Acts of Lasciviousness - AumanDaryl Noel TejanoNessuna valutazione finora
- Internet of Things (IoT)Documento19 pagineInternet of Things (IoT)veeru3112100% (1)
- Emergency ShowerDocumento8 pagineEmergency Showerromdhan88Nessuna valutazione finora
- Dec. 23 To Dec. 27Documento13 pagineDec. 23 To Dec. 27dprincebuchikoyNessuna valutazione finora
- Myers Human Survival After DeathDocumento1.624 pagineMyers Human Survival After Deathdionysus999100% (1)
- Section 28 30 00 - Fire Alarm and Smoke Detector Systems Part 1 - GeneralDocumento52 pagineSection 28 30 00 - Fire Alarm and Smoke Detector Systems Part 1 - GeneralhpoerbayaNessuna valutazione finora
- Procedure For Fab, Erec & Testing of Abovegroud PipingDocumento16 pagineProcedure For Fab, Erec & Testing of Abovegroud Pipingvpsimbu86Nessuna valutazione finora
- Specification: Department: Control Systems Document No: I010SDocumento35 pagineSpecification: Department: Control Systems Document No: I010SRakesh Karan SinghNessuna valutazione finora
- Procedure For Fab, Erec & Testing of Undergroud PipingDocumento12 pagineProcedure For Fab, Erec & Testing of Undergroud Pipingvpsimbu86Nessuna valutazione finora
- Airborne Internet: Dhole Patil College of EngineeringDocumento34 pagineAirborne Internet: Dhole Patil College of Engineeringsijojacob1111Nessuna valutazione finora
- An Adaptive Programming Model For Fault-Tolerant Distributed Computing - DataminingDocumento68 pagineAn Adaptive Programming Model For Fault-Tolerant Distributed Computing - DataminingUsha BaburajNessuna valutazione finora
- Jsir350 4 Al R D6.0 0 0Documento2 pagineJsir350 4 Al R D6.0 0 0Saad AbdullahNessuna valutazione finora
- Term Exam X (GS)Documento2 pagineTerm Exam X (GS)gkawsar22Nessuna valutazione finora
- Labor Law ReviewDocumento11 pagineLabor Law ReviewKay VPNessuna valutazione finora
- Railroad ParkDocumento1 paginaRailroad Parkapi-242863382Nessuna valutazione finora
- Va Nca 09 67 23Documento6 pagineVa Nca 09 67 23Sigit BintanNessuna valutazione finora
- 132 K.V Sub-Station Nakodar, JalandharDocumento24 pagine132 K.V Sub-Station Nakodar, JalandharMrJatinder Singh100% (1)
- Standard Specification FOR Hot Insulation: Alpha Project Services Private LimitedDocumento36 pagineStandard Specification FOR Hot Insulation: Alpha Project Services Private LimitedNehal VaghelaNessuna valutazione finora
- Terrorist HandbookDocumento63 pagineTerrorist HandbookOscar FrizziNessuna valutazione finora
- Micromax CaseDocumento30 pagineMicromax CaseLakshav KapoorNessuna valutazione finora
- A Study of Customer Satisfaction of The Products and Services Offered by Axis BankDocumento80 pagineA Study of Customer Satisfaction of The Products and Services Offered by Axis Bankchao sherpa67% (3)
- BT0079-Mini Project GuidelinesDocumento9 pagineBT0079-Mini Project GuidelinesJohn ArthurNessuna valutazione finora
- Sadfsadfsdsadfsfsdsushmit Sur: Sap Remote Support InfrastructureDocumento8 pagineSadfsadfsdsadfsfsdsushmit Sur: Sap Remote Support Infrastructureviraivil9417Nessuna valutazione finora
- Response To Bank AttorneyDocumento5 pagineResponse To Bank Attorneydbush2778Nessuna valutazione finora
- 2DMT 1314 - Brief T2.1Documento32 pagine2DMT 1314 - Brief T2.1miskinmusic123Nessuna valutazione finora
- Final Competency Mapping @wiproDocumento43 pagineFinal Competency Mapping @wipropraval1908Nessuna valutazione finora
- Sadfsfsdsushmit Sur: Sap Remote Support InfrastructureDocumento8 pagineSadfsfsdsushmit Sur: Sap Remote Support Infrastructureviraivil9417Nessuna valutazione finora
- McseDocumento2 pagineMcseHonoured AliNessuna valutazione finora
- At&T Enhances Mobile Internet Coverage Massachusetts Institute of TechnologyDocumento5 pagineAt&T Enhances Mobile Internet Coverage Massachusetts Institute of TechnologyAnonymous yZhsGqNessuna valutazione finora
- Section 26 08 13 - Electrical Systems Prefunctional Checklists and Start-UpsDocumento27 pagineSection 26 08 13 - Electrical Systems Prefunctional Checklists and Start-UpsMhya Thu UlunNessuna valutazione finora
- XLR3 ConnectorsDocumento10 pagineXLR3 ConnectorsAbel FSNessuna valutazione finora
- Ameer ResumeDocumento10 pagineAmeer ResumeAmimul Ehasan ShakibNessuna valutazione finora
- Service Procedures Examination and Test Procedures: MMSL-003Documento12 pagineService Procedures Examination and Test Procedures: MMSL-003Ahmed ButtNessuna valutazione finora
- Max Newyork Life Insuance 2Documento102 pagineMax Newyork Life Insuance 2prince395Nessuna valutazione finora
- Digital Cycle SheetDocumento4 pagineDigital Cycle SheetKristy JoseNessuna valutazione finora
- Minutes - Friends of Community Path 11032010Documento6 pagineMinutes - Friends of Community Path 11032010smusgravNessuna valutazione finora
- (PDF) Impacto Ambiental MonografiaDocumento13 pagine(PDF) Impacto Ambiental MonografiaRichard Symon Tisnado RamosNessuna valutazione finora
- Applicable Parts of Pnri Regulations: Safety in The Use of Nuclear Equipment and DevicesDocumento64 pagineApplicable Parts of Pnri Regulations: Safety in The Use of Nuclear Equipment and DevicesAlvin Garcia PalancaNessuna valutazione finora
- Age and Second Language Acquisition David SingletonDocumento10 pagineAge and Second Language Acquisition David Singletonmaja_the_cuteNessuna valutazione finora
- Assign 1 Assess Unit 10 AnimationDocumento6 pagineAssign 1 Assess Unit 10 Animationapi-235985175Nessuna valutazione finora
- Section 23 57 20 - Plate and Frame Heat ExchangersDocumento7 pagineSection 23 57 20 - Plate and Frame Heat ExchangersHoucem Eddine MechriNessuna valutazione finora
- CVSriram UK32Documento2 pagineCVSriram UK32Sudarsan SridharanNessuna valutazione finora
- Panasonic TVsDocumento4 paginePanasonic TVsmarshlee405Nessuna valutazione finora
- Industrial DataDocumento63 pagineIndustrial DatajesushernandezhNessuna valutazione finora
- Swot AnalysisDocumento16 pagineSwot AnalysisKing HiramNessuna valutazione finora
- 2008 Bar ExamsDocumento39 pagine2008 Bar ExamsRaffy PangilinanNessuna valutazione finora
- Third Division: ChairpersonDocumento8 pagineThird Division: ChairpersonJedAdrianNessuna valutazione finora
- Explanation of Phetorial ChoicesDocumento4 pagineExplanation of Phetorial Choicesapi-240562471Nessuna valutazione finora
- Comparative Study of Balance Sheet For Company Last 2 Analyzed and Reference The RATIO ANALYSIS at Nahar Industrial Enterprises Ltd.Documento105 pagineComparative Study of Balance Sheet For Company Last 2 Analyzed and Reference The RATIO ANALYSIS at Nahar Industrial Enterprises Ltd.prince395Nessuna valutazione finora
- Technical Specification Wooden HousesDocumento8 pagineTechnical Specification Wooden HousesNoor MohdNessuna valutazione finora
- CLV Blog (Agency)Documento92 pagineCLV Blog (Agency)sdysangcoNessuna valutazione finora
- Project Management Case Study: The Custom Woodworking Company - Woody 2010 Project R. Max WidemanDocumento9 pagineProject Management Case Study: The Custom Woodworking Company - Woody 2010 Project R. Max WidemantoaniltiwariNessuna valutazione finora
- Location Recce SheetDocumento2 pagineLocation Recce SheetAngie HarmonNessuna valutazione finora
- Sample Permission Letter For Film ShootingDocumento1 paginaSample Permission Letter For Film ShootingAbhishek Bendigeri0% (1)
- Advanced Supply Chain: Important TopicsDocumento2 pagineAdvanced Supply Chain: Important TopicsAbhishek BendigeriNessuna valutazione finora
- Mindtree A Community of Communities Commerce EssayDocumento4 pagineMindtree A Community of Communities Commerce EssayAbhishek BendigeriNessuna valutazione finora
- PA AssignmentDocumento3 paginePA AssignmentAbhishek BendigeriNessuna valutazione finora
- Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh JoshDocumento2 pagineJosh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh Josh JoshAbhishek BendigeriNessuna valutazione finora
- Challenges in E-CommerceDocumento5 pagineChallenges in E-CommerceAbhishek BendigeriNessuna valutazione finora
- Capital StructurProblemse ProblemsDocumento4 pagineCapital StructurProblemse ProblemsAbhishek BendigeriNessuna valutazione finora
- Coke Studio (Pakistan) Several Seasons: Television Series Hindustani Carnatic Indian Folk Hip Hop Rock PopDocumento1 paginaCoke Studio (Pakistan) Several Seasons: Television Series Hindustani Carnatic Indian Folk Hip Hop Rock PopAbhishek BendigeriNessuna valutazione finora
- AnswersDocumento4 pagineAnswersAbhishek BendigeriNessuna valutazione finora
- Parker V The Southern-Eastern Railway CoDocumento7 pagineParker V The Southern-Eastern Railway CoAbhishek BendigeriNessuna valutazione finora
- Sep 2014 Current Affairs 2nd Week-22Documento5 pagineSep 2014 Current Affairs 2nd Week-22Abhishek BendigeriNessuna valutazione finora
- Stage Committee Security Hospitality Fillers Food & Beverages Recruiting StandbyDocumento5 pagineStage Committee Security Hospitality Fillers Food & Beverages Recruiting StandbyAbhishek BendigeriNessuna valutazione finora
- Sep 2014 Current Affairs First Week-30Documento6 pagineSep 2014 Current Affairs First Week-30Abhishek BendigeriNessuna valutazione finora
- Quectel MC60 at Commands Manual V1.2Documento262 pagineQuectel MC60 at Commands Manual V1.2Adimaro MontoyaNessuna valutazione finora
- 10q Poster LH EnglishDocumento1 pagina10q Poster LH EnglishTri Sumadya Aditya100% (1)
- iQ-WEBX 6 2 3 Installation Guide INT EN - 001RDocumento51 pagineiQ-WEBX 6 2 3 Installation Guide INT EN - 001RDoug KolkowNessuna valutazione finora
- Lista Comandi Tk1m06Documento3 pagineLista Comandi Tk1m06Shahram SherkatNessuna valutazione finora
- Krunker ModMenuDocumento10 pagineKrunker ModMenuCody Kartavya0% (1)
- Is 13134Documento14 pagineIs 13134Sowjanya ChNessuna valutazione finora
- ASSEMBLY AND PARTS ALBUM - Kipor Power Systems - KDE6700TA PDFDocumento2 pagineASSEMBLY AND PARTS ALBUM - Kipor Power Systems - KDE6700TA PDFracsoNessuna valutazione finora
- Organic Chemistry 4th Edition Gorzynski Test BankDocumento17 pagineOrganic Chemistry 4th Edition Gorzynski Test Bankdigonousconcrewh2zxi100% (31)
- Aerocore PropertiesDocumento2 pagineAerocore PropertieskflimNessuna valutazione finora
- DLP Sample Detailed Lesson PlanDocumento4 pagineDLP Sample Detailed Lesson PlanJaydie PalNessuna valutazione finora
- Anandarup Ray CVDocumento4 pagineAnandarup Ray CVsrihariNessuna valutazione finora
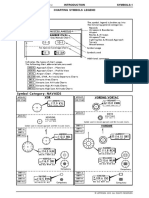
- Jeppesen Charts LegendsDocumento34 pagineJeppesen Charts LegendsFatih OguzNessuna valutazione finora
- Manual de Parts ES16D6Documento36 pagineManual de Parts ES16D6Eduardo CortezNessuna valutazione finora
- Dyeing Machines: By: Ambika Udaikumar Ankita Singh Dhara Parmar Monali Wani Sonal MarwahDocumento15 pagineDyeing Machines: By: Ambika Udaikumar Ankita Singh Dhara Parmar Monali Wani Sonal MarwahMohammed Atiqul Hoque ChowdhuryNessuna valutazione finora
- What MobileDocumento100 pagineWhat MobiledoarraulNessuna valutazione finora
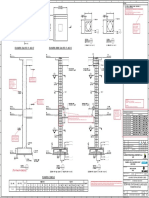
- 327101-BJ81-C-RCC-0007 Rev.00 - Client MarkupDocumento1 pagina327101-BJ81-C-RCC-0007 Rev.00 - Client MarkupGokulprabhuNessuna valutazione finora
- BMW COMMON RAIL Injection Systems PDFDocumento22 pagineBMW COMMON RAIL Injection Systems PDFEnd1y1Nessuna valutazione finora
- Lesson 3 - Equipment and FacilitiesDocumento15 pagineLesson 3 - Equipment and FacilitiesRishiel Dimple BalonesNessuna valutazione finora
- Minimal Requirements: Solaris InstallationDocumento74 pagineMinimal Requirements: Solaris InstallationsrinivasNessuna valutazione finora
- CSC204 - Chapter 3.1Documento30 pagineCSC204 - Chapter 3.1Alif HaiqalNessuna valutazione finora
- Carrier SelectionDocumento13 pagineCarrier SelectionRanesh SinglaNessuna valutazione finora
- Building Applied Natural Language GenerationDocumento32 pagineBuilding Applied Natural Language Generationrat86Nessuna valutazione finora
- CHEN3000 Process Plant Engineering: Semester 2 2016Documento30 pagineCHEN3000 Process Plant Engineering: Semester 2 2016Max Yee Min JueyNessuna valutazione finora
- 2018 Radio Programming GuidesDocumento21 pagine2018 Radio Programming GuidesCesar Del CastilloNessuna valutazione finora
- Assessment 1 - Questioning - Written Assessment: Satisfactory or Not Yet SatisfactoryDocumento35 pagineAssessment 1 - Questioning - Written Assessment: Satisfactory or Not Yet SatisfactorySonal Awasthi MishraNessuna valutazione finora
- Common Examples and Applications of Copolymers. Acrylonitrile Butadiene Styrene (ABS)Documento4 pagineCommon Examples and Applications of Copolymers. Acrylonitrile Butadiene Styrene (ABS)Yashi SrivastavaNessuna valutazione finora
- MZP10000000-30010-MTS-TC - 000007 - T&C Ahu & Fahu - FinalDocumento59 pagineMZP10000000-30010-MTS-TC - 000007 - T&C Ahu & Fahu - FinalFaiyazsulthanNessuna valutazione finora
- pLINES Datasheet FP V2.22Documento2 paginepLINES Datasheet FP V2.22TrinhDinhLoc0% (1)
- Hangzhou Chenrui Air Separator Installation Manufacture CO., LTDDocumento10 pagineHangzhou Chenrui Air Separator Installation Manufacture CO., LTDTonyNessuna valutazione finora
- Microsoft PowerPoint - ASEP - NSCP 2015 Chapter6 - WOODDocumento75 pagineMicrosoft PowerPoint - ASEP - NSCP 2015 Chapter6 - WOODRay Ramilo67% (9)