Potrebbero piacerti anche
- P1 CONTimagDocumento15 pagineP1 CONTimagJhon DavidNessuna valutazione finora
- Fundamentos de La Dinámica de Fluidos ComputacionalDocumento5 pagineFundamentos de La Dinámica de Fluidos ComputacionalFRANCISCORCNessuna valutazione finora
- Presentacion de InstalacionesDocumento8 paginePresentacion de InstalacionesRouse CalderónNessuna valutazione finora
- Dinámica de Fluidos Computacional (CFD)Documento68 pagineDinámica de Fluidos Computacional (CFD)Abdul Londoño E100% (3)
- Sistema SobreamortiguadoDocumento21 pagineSistema SobreamortiguadoEry FreireNessuna valutazione finora
- Memoria de Calculo - 20142 Autor Darwin Marx Turpo Cayo CivilgeeksDocumento3 pagineMemoria de Calculo - 20142 Autor Darwin Marx Turpo Cayo CivilgeeksAnonymous 8sXZS8NNessuna valutazione finora
- Laboratorio de Fluido ViscosimetroDocumento21 pagineLaboratorio de Fluido ViscosimetroGina GuajalaNessuna valutazione finora
- Informe AerodinamicaDocumento18 pagineInforme AerodinamicaLuisa Fernanda Rodríguez0% (2)
- Resolución de Estructuras Hiperestáticas Con El Método de Flexibilidades PDFDocumento10 pagineResolución de Estructuras Hiperestáticas Con El Método de Flexibilidades PDFGabriel Angel Coayla VivancoNessuna valutazione finora
- Estadistica Formato AbetDocumento9 pagineEstadistica Formato AbetDaniel CcopaNessuna valutazione finora
- Solicitaciones Sísmicas 2013-2Documento24 pagineSolicitaciones Sísmicas 2013-2Camilo RusinqueNessuna valutazione finora
- Captacion Pampa Grande Especificaciones TecnicasDocumento10 pagineCaptacion Pampa Grande Especificaciones TecnicasManuel HuarnizNessuna valutazione finora
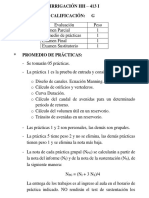
- 0 - Introduccion - IRRIGACIÓN - UNIDocumento37 pagine0 - Introduccion - IRRIGACIÓN - UNIJhonatan Guevara SalazarNessuna valutazione finora
- Solución Tarea 7 CompletaDocumento18 pagineSolución Tarea 7 CompletaMauricio Senior RamírezNessuna valutazione finora
- Vertedero TriangularDocumento22 pagineVertedero TriangularPlinio Quintanilla AronésNessuna valutazione finora
- Manual de Uso Vigas PDFDocumento10 pagineManual de Uso Vigas PDFJuan Mario Guevara PeñarandaNessuna valutazione finora
- Flujo CompresibleDocumento13 pagineFlujo CompresibleJean OrtizNessuna valutazione finora
- Analisis de Vigas y Marcos Por Elem FinitDocumento96 pagineAnalisis de Vigas y Marcos Por Elem FinitJavier Muñoz0% (1)
- Diptico Diplomado en SismoDocumento4 pagineDiptico Diplomado en Sismoaldex10Nessuna valutazione finora
- Análisis Estructural-SeudotridimensionalDocumento41 pagineAnálisis Estructural-SeudotridimensionaljulidanitzaNessuna valutazione finora
- Preguntas Primer ExamenDocumento3 paginePreguntas Primer ExamenStivieAaronHuallpaBordaNessuna valutazione finora
- Solucionario-Seccion B-Tercera Práctica Calificada-Mecánica de Fluidos IiDocumento4 pagineSolucionario-Seccion B-Tercera Práctica Calificada-Mecánica de Fluidos IiCinthia Lidia Hidrogo PaulinoNessuna valutazione finora
- Dinamica de Fluidos Computacional CFDDocumento3 pagineDinamica de Fluidos Computacional CFDjhonycatheNessuna valutazione finora
- MecanismosDocumento240 pagineMecanismosИван СотоNessuna valutazione finora
- Analisis Sismico de Edificios Con Aisladores, Elastomericos, Pendulo TripleDocumento52 pagineAnalisis Sismico de Edificios Con Aisladores, Elastomericos, Pendulo TripleterryNessuna valutazione finora
- Cuaderno Estructuras II-Aguirre KarinaDocumento169 pagineCuaderno Estructuras II-Aguirre KarinaChristian XBNessuna valutazione finora
- Mecánica Del Medio ContinuoDocumento6 pagineMecánica Del Medio ContinuoAlberto RuizNessuna valutazione finora
- Metodos Numericos IfDocumento3 pagineMetodos Numericos IfHectorToMsCastilloArceNessuna valutazione finora
- 1 ContenidoDocumento4 pagine1 ContenidoIrving PalominoNessuna valutazione finora
- Analisis Estrucctural Finitos 2Documento35 pagineAnalisis Estrucctural Finitos 2LLeimi Cater Pilco RafaelNessuna valutazione finora
- Mecanica Fluidos AvanzadaDocumento95 pagineMecanica Fluidos AvanzadaJose Heli Vallejos CoronadoNessuna valutazione finora
- Wavewatch IIIDocumento5 pagineWavewatch IIIkail_montollaNessuna valutazione finora
- TP2 - CimentacionesDocumento9 pagineTP2 - CimentacionesLucas Bessone100% (2)
- Tarea 3 Dinamica - Elizabeth SilvaDocumento19 pagineTarea 3 Dinamica - Elizabeth SilvaSANTIAGO PAVA CANONessuna valutazione finora
- Formato - Formulario Primer Parcial MetalicasDocumento8 pagineFormato - Formulario Primer Parcial MetalicasDamar NinaNessuna valutazione finora
- Clasificacion de Columnas RectangularesDocumento6 pagineClasificacion de Columnas RectangularesRoosevelt Mamani QuispeNessuna valutazione finora
- Análisis de Vivienda Unifamiliar Aplicando El Teorema de CastiglianoDocumento33 pagineAnálisis de Vivienda Unifamiliar Aplicando El Teorema de CastiglianoGiancarlo René Bendezú MartínezNessuna valutazione finora
- Resdes de Tuberías Gradiente Hidráulico 02 ReservoriosDocumento28 pagineResdes de Tuberías Gradiente Hidráulico 02 ReservoriosorbashaNessuna valutazione finora
- Curso Sobre Metodos Numericos - A. GranadosDocumento187 pagineCurso Sobre Metodos Numericos - A. GranadosAndres GranadosNessuna valutazione finora
- Calibración Del Método de Bell Con Isoyetas S.C.T.Documento3 pagineCalibración Del Método de Bell Con Isoyetas S.C.T.Joaquín Alejandro Cruz MartínezNessuna valutazione finora
- Mecanica Fluidos Cap08Documento55 pagineMecanica Fluidos Cap08Abraham Shardin MesiaNessuna valutazione finora
- 6° Método Pendiente Deflexión (Gonzales Cuevas)Documento44 pagine6° Método Pendiente Deflexión (Gonzales Cuevas)Ismael Cabello CarrilloNessuna valutazione finora
- Comparación Cimentaciones ElásticasDocumento19 pagineComparación Cimentaciones ElásticasPatricio PalaciosNessuna valutazione finora
- E SpectroDocumento7 pagineE SpectroPaulo César Huertas MoryNessuna valutazione finora
- CanalesDocumento116 pagineCanalesMarilynAlexandraAlvaradoCastilloNessuna valutazione finora
- Ensayos de ArenaDocumento29 pagineEnsayos de ArenaLuisTurpoNessuna valutazione finora
- 1 Informe-ConsolidacionDocumento12 pagine1 Informe-ConsolidacionAnton Choque PazNessuna valutazione finora
- Elementos Finitos LibroDocumento153 pagineElementos Finitos LibroEver Jose Ortega JimenezNessuna valutazione finora
- Materiales IDocumento8 pagineMateriales IMARIBEL CHAUCA GARCIANessuna valutazione finora
- Zapatas Combinadas - Concreto Armado Ii. - DiaposDocumento35 pagineZapatas Combinadas - Concreto Armado Ii. - DiaposClara Pocco GalaNessuna valutazione finora
- Capitulo I - II ..Documento39 pagineCapitulo I - II ..LuisFernandoPelaezRiosNessuna valutazione finora
- Comportamiento Sismico de EdificiosDocumento272 pagineComportamiento Sismico de EdificiosJohn AlbinoNessuna valutazione finora
- Ejercicio Viga Euler BernoulliDocumento4 pagineEjercicio Viga Euler BernoulliLuis Becerra SuárezNessuna valutazione finora
- Módulo 3 - Tema 3 (Parte I)Documento41 pagineMódulo 3 - Tema 3 (Parte I)Francisco CabreraNessuna valutazione finora
- Fisica-Segunda Ley de NewtonDocumento8 pagineFisica-Segunda Ley de NewtonFredi CalNessuna valutazione finora
- Especificaciones Tecnicas - Aguas Verdes de Rio AmarilloDocumento249 pagineEspecificaciones Tecnicas - Aguas Verdes de Rio AmarilloAnonymous JFoiCB78pNessuna valutazione finora
- Trabajo AfpDocumento31 pagineTrabajo AfpHans LagosNessuna valutazione finora
- Dinámica de Fluidos (CFD)Documento8 pagineDinámica de Fluidos (CFD)Juan ChrNessuna valutazione finora
- Dinamica de Fluidos ComputucionalDocumento8 pagineDinamica de Fluidos ComputucionalCinthia Santamaria TeneNessuna valutazione finora
- Matemáticas avanzadas aplicadas para ingenieríaDa EverandMatemáticas avanzadas aplicadas para ingenieríaNessuna valutazione finora
- Trabajo de Titulación PDFDocumento207 pagineTrabajo de Titulación PDFLuis Paladines BravoNessuna valutazione finora
- Informe Amarok Frenos Ministerio AmbienteDocumento2 pagineInforme Amarok Frenos Ministerio AmbienteLuis Paladines BravoNessuna valutazione finora
- Informe Amarok Vibracion Falta Potencia MinAmbDocumento2 pagineInforme Amarok Vibracion Falta Potencia MinAmbLuis Paladines BravoNessuna valutazione finora
- Informe Cambio de Aceite Amarok MinAmbDocumento3 pagineInforme Cambio de Aceite Amarok MinAmbLuis Paladines BravoNessuna valutazione finora
- Instructivo Diseño (Proyecto) de Tesis 2020Documento12 pagineInstructivo Diseño (Proyecto) de Tesis 2020Luis Paladines BravoNessuna valutazione finora
- Informe Banda Accesorios Templador Amarok MinAmbDocumento4 pagineInforme Banda Accesorios Templador Amarok MinAmbLuis Paladines BravoNessuna valutazione finora
- Manual PSIMDocumento21 pagineManual PSIMVladimirNessuna valutazione finora
- Guía Trabajos GradoDocumento4 pagineGuía Trabajos GradoLuis Paladines BravoNessuna valutazione finora
- AbstractDocumento1 paginaAbstractLuis Paladines BravoNessuna valutazione finora
- 0719 Inf - Sust Ve - 28-02-2020Documento39 pagine0719 Inf - Sust Ve - 28-02-2020Luis Paladines BravoNessuna valutazione finora
- Electro Taxis en LojaDocumento14 pagineElectro Taxis en LojaLuis Paladines BravoNessuna valutazione finora
- Analisis de GasesDocumento18 pagineAnalisis de GasesGerman GiraudoNessuna valutazione finora
- Respaldo Director Inicio Del Proceso GraduaciónDocumento1 paginaRespaldo Director Inicio Del Proceso GraduaciónLuis Paladines BravoNessuna valutazione finora
- Cargadoras Doosan PDFDocumento15 pagineCargadoras Doosan PDFLuis Paladines Bravo100% (1)
- Generación de Desechos (Anexo B y C)Documento16 pagineGeneración de Desechos (Anexo B y C)Andrea DíazNessuna valutazione finora
- Necesidad Mantenimiento de VehiculosDocumento74 pagineNecesidad Mantenimiento de VehiculosLuis Paladines BravoNessuna valutazione finora
- Proforma Hospital Paltas Agos DicDocumento5 pagineProforma Hospital Paltas Agos DicLuis Paladines BravoNessuna valutazione finora
- Aditivos de CombustibleDocumento7 pagineAditivos de CombustibleLuis Paladines BravoNessuna valutazione finora
- Mantenimiento ProgramadoDocumento5 pagineMantenimiento ProgramadoLuis Paladines BravoNessuna valutazione finora
- Alfa Romeo Common Rail PDFDocumento18 pagineAlfa Romeo Common Rail PDFAriel MezaNessuna valutazione finora
- Guia para Obtener Coordenadas PDFDocumento10 pagineGuia para Obtener Coordenadas PDFChristian TacuriNessuna valutazione finora
- Sistema Electrico de MotorDocumento42 pagineSistema Electrico de MotorLuis Paladines BravoNessuna valutazione finora
- Informe Camioneta. Check List.Documento1 paginaInforme Camioneta. Check List.Luis Paladines BravoNessuna valutazione finora
- Proforma Arcsa 2018 3Documento2 pagineProforma Arcsa 2018 3Luis Paladines Bravo100% (1)
- MANUAL CJ4 EspañolDocumento148 pagineMANUAL CJ4 EspañolSebastian Espinoza100% (1)
- OMT282665 (Manual Operador 250D y 300D)Documento260 pagineOMT282665 (Manual Operador 250D y 300D)Luis Paladines Bravo0% (1)
- Audi Common Rail Motor V8 TDI 3.3 LTRDocumento36 pagineAudi Common Rail Motor V8 TDI 3.3 LTRJuan Antonio Schmeisser KeinNessuna valutazione finora
- Operación y Mantenimiento - Rodillo Dynapac CA2500Documento176 pagineOperación y Mantenimiento - Rodillo Dynapac CA2500Luis Paladines BravoNessuna valutazione finora
- Manual Operador 310KDocumento284 pagineManual Operador 310KLuis Paladines Bravo94% (17)
- Manual Operador Excavadora 350GLCDocumento290 pagineManual Operador Excavadora 350GLCLuis Paladines Bravo100% (7)
- PLATILLA EXCEL - TABLAS DE FRECUENCIA 2 CamiloDocumento15 paginePLATILLA EXCEL - TABLAS DE FRECUENCIA 2 Camilocamilo andres suarez sanchezNessuna valutazione finora
- Indice-Actualizado-Decreto-780-2016 (MARZO 4-2020)Documento10 pagineIndice-Actualizado-Decreto-780-2016 (MARZO 4-2020)Ermes Navarro SotomayorNessuna valutazione finora
- Generacion de CelularesDocumento7 pagineGeneracion de CelularesMiguel YE RivasNessuna valutazione finora
- S02.s2 - Arbol de DecisionDocumento19 pagineS02.s2 - Arbol de DecisionFlor Arévalo JuárezNessuna valutazione finora
- Estatuto Afusam Río BuenoDocumento4 pagineEstatuto Afusam Río BuenoafusamriobuenoNessuna valutazione finora
- Cronograma Visual - Economía General (3) - JPNBPDDocumento1 paginaCronograma Visual - Economía General (3) - JPNBPDYamali PerlacioNessuna valutazione finora
- Página de Revisión - Western Union ArgentinaDocumento2 paginePágina de Revisión - Western Union ArgentinaGonzalez Pablo EzequielNessuna valutazione finora
- Guia PDFDocumento71 pagineGuia PDFDiego LópezNessuna valutazione finora
- Modelos Reológicos: Ing. Roger Condori LizarragaDocumento18 pagineModelos Reológicos: Ing. Roger Condori LizarragaMauricio CadimaNessuna valutazione finora
- Taller de Programacion para NiñosDocumento12 pagineTaller de Programacion para NiñosCRISTIAN DAVID AGREDO TREJOSNessuna valutazione finora
- Modelo Contrato Individual de Trabajo A Término FijoDocumento3 pagineModelo Contrato Individual de Trabajo A Término FijoingridNessuna valutazione finora
- Curricula Estudios Basado en Competencias de La Facultad de Ingeniería de Sistemas 2011 UNCP HuancayoDocumento27 pagineCurricula Estudios Basado en Competencias de La Facultad de Ingeniería de Sistemas 2011 UNCP HuancayorobensoyNessuna valutazione finora
- Proyedc Grupo 3Documento25 pagineProyedc Grupo 3Oscar Sebastian Diaz CelizNessuna valutazione finora
- Revistra Tierra Derecha Programa Sporting Viernes 12 de Junio de 2020 PDFDocumento115 pagineRevistra Tierra Derecha Programa Sporting Viernes 12 de Junio de 2020 PDFJuan CarlosNessuna valutazione finora
- Procesamiento Cerámicos y CermetsDocumento61 pagineProcesamiento Cerámicos y Cermetsyordan gonzalezNessuna valutazione finora
- Factibilidad de Ventas de CremaDocumento20 pagineFactibilidad de Ventas de CremagmielesNessuna valutazione finora
- 01 - Libro de Windows 10Documento47 pagine01 - Libro de Windows 10Edgardo XaisNessuna valutazione finora
- Acondicionamiento de Medicamentos InformeDocumento11 pagineAcondicionamiento de Medicamentos InformeNilreyam FerNessuna valutazione finora
- ACCU-201 - FORMATOALUMNOTRABAJOFINAL de Diagnóstico y Reparación de Motores Diésel y Gasolina.Documento20 pagineACCU-201 - FORMATOALUMNOTRABAJOFINAL de Diagnóstico y Reparación de Motores Diésel y Gasolina.Milton romario De la cruz de la cruzNessuna valutazione finora
- Plano 01. - Croquis de LocalizacionDocumento4 paginePlano 01. - Croquis de LocalizacionLee YuenNessuna valutazione finora
- Resolución Desestimado - NuevoDocumento3 pagineResolución Desestimado - NuevoEmerson WaldirNessuna valutazione finora
- Matemáticas Financieras para Toma de Decisiones EmpresarialesDocumento5 pagineMatemáticas Financieras para Toma de Decisiones EmpresarialesNinia TsiNessuna valutazione finora
- FyEP U1 AA1 Mercado Uveg OkDocumento6 pagineFyEP U1 AA1 Mercado Uveg OkKarla CargutieNessuna valutazione finora
- Diagnóstico y Rediseño de La ChacraDocumento17 pagineDiagnóstico y Rediseño de La ChacraJabin Guerrero MondragonNessuna valutazione finora
- Ejercicio Resueltos en Q y ZDocumento11 pagineEjercicio Resueltos en Q y Zhasburgo71Nessuna valutazione finora
- Tutela - ProvidenciaDocumento8 pagineTutela - Providencianicolas fernandez cortesNessuna valutazione finora
- Previo 7. Destilación Simple y FraccionadaDocumento3 paginePrevio 7. Destilación Simple y Fraccionadaaysha avilesNessuna valutazione finora
- Actitudes y AptitudesDocumento11 pagineActitudes y AptitudesDeyvi ChiteNessuna valutazione finora
- CP CLV CPR2021 CRONOGRAMA 9agoDocumento1 paginaCP CLV CPR2021 CRONOGRAMA 9agoANGIE MISHEL CHOQUE GARCIANessuna valutazione finora
- SISTEMA "DRYWALL" ¿Ventaja o Desventaja Ingenieril - UNPRGDocumento23 pagineSISTEMA "DRYWALL" ¿Ventaja o Desventaja Ingenieril - UNPRGAnonymous F9t6qljCF75% (4)